


MEMS-IMUs der nächsten Generation – Hochleistung, skalierbar
Um herauszufinden, was die Zukunft für MEMS-Automobilnavigationssysteme bringt, habe ich Yang Zhao, CEO, und Teoman Ustun, VP of Marketing and Business Development, ACEINNA, Inc. (Boston, MA) interviewt.
Technische Informationen: Warum nennen Sie ACEINNA IMUs nächste Generation?
Yang Zhao: Unter idealen Bedingungen können Sie ein Auto mit einer Kamera navigieren. Aber um jederzeit Sicherheit und Verfügbarkeit zu erreichen, verlassen sich autonome Fahrzeuge zunehmend auf zusätzliche Sensortechnologien. Diese Sensoren wie Vision, Radar, Lidar, GNSS, RTK können jedoch alle in bestimmten Situationen geblendet werden. IMU ist der einzige Sensor, der auch dann weiterarbeitet, wenn alle anderen Sensoren ausfallen. Unsere Herausforderung besteht darin, die Zeitspanne zu erhöhen, in der die Koppelnavigation mit der IMU zuverlässig ist. Das aktuelle Produkt, das wir haben, entspricht eher einem High-End-Industrieniveau, ist jedoch für den Einbau in Passagierkarten konzipiert.
Teoman Ustun: Die revolutionäre MEMS-Technologie, die wir entwickeln, wird die Leistung eines Glasfaserkreisels zum Preis einer Silizium-MEMS-Lösung erreichen. Das ist im Grunde eine bahnbrechende Technologie.
Mit jeder Generation haben wir die Leistung unserer IMU in Bezug auf Angular Random Walk (ARW), Bias-Instabilität und Vibrations-/Stoß-Immunität verbessert. Mit dieser neuesten Generation haben wir auch eine dreifach redundante Architektur hinzugefügt, was aus zwei Gründen äußerst wichtig ist. Es verbessert die Zuverlässigkeit auf Automobilniveau und erhöht auch die Leistung der IMU. Zum Beispiel haben wir meines Wissens das einzige ASIL-B ISO 26262 (Automotive Safety Integrity Level) qualifizierte INS (Trägheitsnavigationssystem) mit integrierter dreifach redundanter IMU auf dem Markt. Diese Qualifizierung gibt Automobilkunden grundsätzlich das Vertrauen, dass unser Sensor über die gesamte Lebensdauer des Fahrzeugs robust Daten generiert.
Unsere neuesten IMUs verfügen auch über offene Architekturfunktionen, die es unseren Kunden ermöglichen, ihr Know-how zu nutzen oder ihre geheime Sauce in unsere Hardware zu implementieren.
Zhao: IMUs in Luft- und Raumfahrtqualität haben eine ausgezeichnete Stabilität, sind aber groß, schwer und teuer – siehe Abbildung 1 für einen Vergleich der verschiedenen IMU-Klassen. Unser Ziel ist es, ein IMU-System auf den Markt zu bringen, das sich der Navigationsqualität annähert. Heutzutage können Sie IMUs in Navigationsqualität erhalten, aber alle verwenden Glasfaserkreisel und liegen in der Preisklasse von Zehntausenden von Dollar. Sie sind groß, schwer und teuer, aber in der Avionik und beim Militär ist das kein entscheidender Faktor.
Aber wenn Sie über die Verwendung einer IMU in einem Auto sprechen, würde niemand so viel Geld bezahlen. Wir versuchen also, eine MEMS-IMU-Technologie der neuen Generation zu entwickeln, die eine Leistung auf Navigationsniveau erreichen kann, die sich den Leistungsniveaus von Glasfaserkreiseln annähern kann. Im Gegensatz zu anderen, die ursprünglich auf IMUs in Verbraucherqualität abzielten und nun versuchen, sie auf Anwendungen mit höherer Leistung umzustellen, haben wir mit Hochleistungsanwendungen in Industriequalität begonnen, um die Anforderungen für unseren Automobilsensor festzulegen.
Die neuesten Automobilprodukte, die wir eingeführt haben, sind kostengünstig. Sie sind von Grund auf so konzipiert und entwickelt, dass sie eine Preis-Leistungs-Optimierung für Anwendungen mit hohem Volumen aufweisen. Wir streben einen Preis von weniger als 500 US-Dollar und eventuell sogar noch weniger an.
Technische Informationen: Können Sie einige der Funktionen erläutern, die die Genauigkeit, Stabilität und Zuverlässigkeit Ihrer neuen IMU verbessern?
Ustun: Zunächst einmal sind unsere IMU-Sensoren dreifach redundant – es gibt drei Beschleunigungsmesser und drei Kreisel. Wir überwachen alle kritischen Parameter, einschließlich Spannungen, Ströme und Temperaturen, sowie die Leistung einzelner IMUs. Diese dreifache Redundanz ermöglicht es uns, kontinuierliche Selbsttests zu implementieren. Wir gewinnen ein gutes Vertrauen in die Leistung des Kreisels und des Beschleunigungsmessers, indem wir diesen dreifachen Datenstrom vergleichen und gegenüberstellen.

Wir haben auch sechs Freiheitsgrade:Die drei Beschleunigungsmesser und drei Kreisel messen die XYZ-Achsen. Die Kreisel messen die Rotationsgeschwindigkeit, die, wenn sie integriert ist, eine Änderung der Winkelposition ergibt. Der Beschleunigungsmesser misst die Beschleunigung, die bei Integration die Geschwindigkeit und bei erneuter Integration die Position angibt. Durch die Verarbeitung von Kreiseldaten und Beschleunigungsmesserdaten und die Verwendung von Filtern und Algorithmen, die für eine bestimmte Anwendung optimiert sind, erhalten wir wirklich genaue Winkeldaten für Rollen, Nicken und Gieren (siehe Abbildung 2). Die kritischsten Daten für eine Automobilanwendung sind das Gieren, das anzeigt, wie stark das Auto driftet. Die Steigung zeigt an, ob Sie einen Hügel hinauf oder hinunter gehen. Hoffentlich sehen Sie nie eine Rolle in Ihrem Auto.
Technische Informationen: Welche Art von Genauigkeit konnten Sie über welchen Zeitraum aufrechterhalten?
Ustun: Das ist sehr schwer zu sagen, weil es von so vielen verschiedenen Szenarien abhängt. Derzeit müssen wir eine Genauigkeit auf Fahrbahnebene erreichen. Eine Fahrspur ist etwa drei Meter breit, ein Pkw etwa zwei Meter. Da Sie sicherstellen möchten, dass Sie nicht über die Fahrspur hinausfahren, haben Sie etwa einen halben Meter plus oder minus, bevor Sie zu weit abdriften. Bei typischen Autogeschwindigkeiten konnte eine Korrektur von einem halben Meter in weniger als einer Sekunde erreicht werden. Da Sie mit Koppelnavigation die erforderliche Genauigkeit für 60 bis 90 Sekunden einhalten können, kann unsere IMU problemlos ein Auto in seiner Spur halten.
Technische Informationen: Eine IMU gibt Ihnen also eine relative Genauigkeit. Was ist mit absoluter Genauigkeit?
Ustun: Absolute Positionsdaten werden im Allgemeinen von einem GNSS-Signal abgeleitet. In der Vergangenheit lag die Positionsgenauigkeit von GNSS-Empfängern bei einem Meter oder mehr. Daher ist GNSS allein nicht gut genug für die erforderliche Genauigkeit auf Fahrspurebene von bis zu 2 cm.
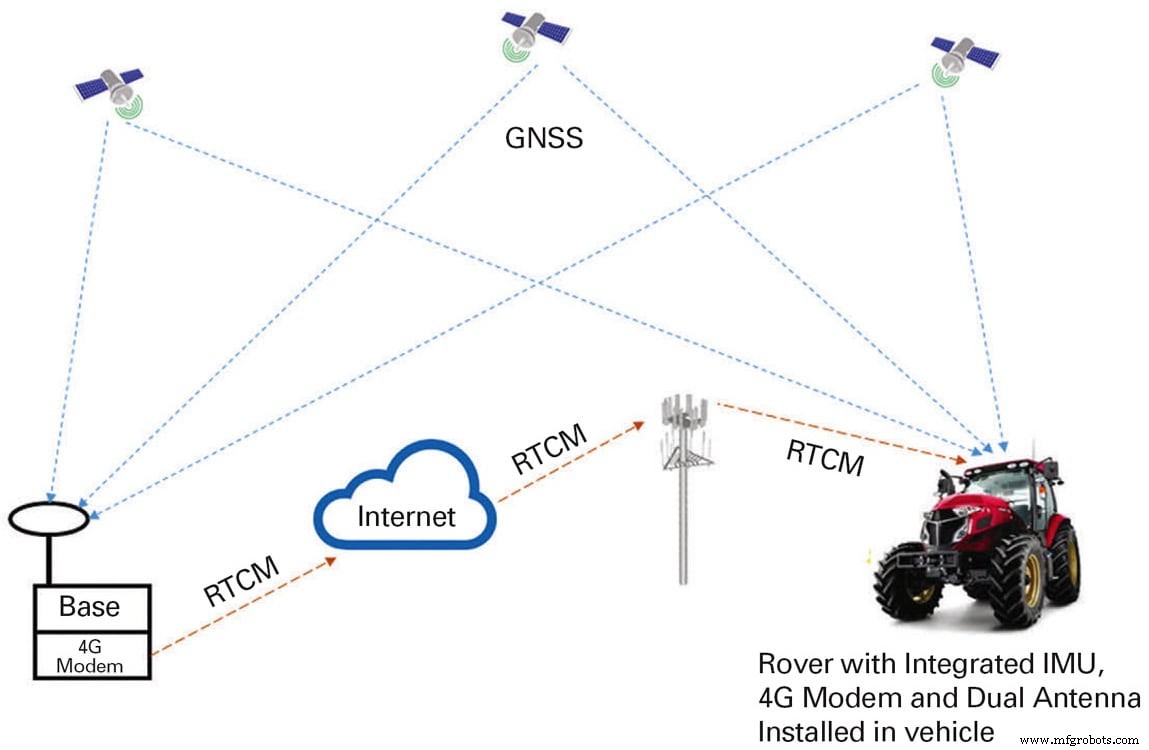
Echtzeitkinematik (RTK) ist eine Technik zur Verbesserung der Positionsgenauigkeit eines GNSS-Empfängers. Es verwendet ein Netzwerk von Basisstationen, die Korrekturen an unsere fahrzeugmontierte RTK-Positionierungs-Engine senden können, die sie verwendet, um ihre Position genauer neu zu berechnen.
RTK ist ein Dienst, den Sie bei vielen Quellen kaufen oder abonnieren können. Was wir immer mehr sehen, ist die Kommunikationsinfrastruktur – sogar Telekommunikationsanbieter wie Verizon, Softbank oder China Mobile – haben damit begonnen, RTK-Dienste anzubieten. Aus unserer Produktperspektive sind wir unabhängig von Dienstanbietern – wir beabsichtigen, jeden einzelnen dieser RTK-Dienstanbieter zu unterstützen, um unseren Kunden dabei zu helfen, die Genauigkeitsgrenzen zu erreichen, nach denen sie suchen. Wir bieten eine Lösung, die sowohl aus Hardware als auch aus Software besteht.
Obwohl wir den Service nicht anbieten, ermöglichen wir unseren Kunden, den für sie am besten geeigneten auszuwählen. Wir qualifizieren diese Dienste jedoch zuerst. Wir achten darauf, dass sie mit unserer Hard- und Software kompatibel sind. Und dann stellen wir es auf unsere Website, um Kunden die Flexibilität zu geben, aus einer Liste von Dienstleistern auszuwählen. Am häufigsten wird RTK als Dienst über ein 4G-LTE-Netzwerk bereitgestellt. Wenn kein 4G-LTE-Empfang besteht, gibt es alternative Möglichkeiten, die Korrektursignale zu empfangen, z. B. die satellitengestützte Kommunikation.
Für RTK stellen Sie Basisstationen über ein Netzwerk auf:Es gibt eine Faustregel, dass Sie Basisstationen normalerweise in einem Radius von 50 Meilen aufstellen. Diese Basisstationen sind so positioniert, dass ihre Standorte sehr genau bekannt sind. Korrekturen werden generiert, indem der Fehler zwischen dem GNSS-Signal und dem genau bekannten Standort einer Basisstation gemessen wird.
Wir haben also eine umfassende Lösung:Ein Trägheitsnavigationssystem, das unsere dreifach redundante Hochleistungs-IMU mit sechs Freiheitsgraden in Verbindung mit einem Zweifrequenz-GNSS-Empfänger in zwei verschiedenen Formfaktoren enthält. Einer ist ein Modulformfaktor. Wenn der Kunde dies in seinem eigenen Motorsteuergerät (ECU) reflowen möchte, kann er dies tun, oder er kann ansonsten unsere verpackte Plug-and-Play-Lösung verwenden. Im Grunde schließen Sie einfach die GPS/GNSS-Antenne an und das System läuft auf CAN-Bus oder Ethernet.
Dieser Artikel wurde von Ed Brown, Herausgeber von Sensor Technology, verfasst. Weitere Informationen finden Sie hier .
Sensor
- VersaLogic veröffentlicht Xeon-basierten Hochleistungs-Embedded-Computer
- Der Geschäftsbereich Hochleistungsmaterialien von Lanxess wird rechtlich unabhängig
- HDPE-Technologie mit hoher Feuchtigkeitsbarriere für flexible Mehrschichtverpackungen
- In-Mold-Etikettierung:Hohe Leistung zu geringeren Kosten
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S220 F
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S220 O
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S225 F
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S232 T6
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S232 T6x
- Spritzgeformte Hochleistungs-Aluminiumlegierung DISPAL S250 F