


Was ist ein Schrittmotor? Typen, Konstruktion, Betrieb und Anwendungen
Arten von Schrittmotoren – ihre Konstruktion, Funktionsweise und Anwendungen
Die Erfindung dedizierter Treiberkarten für Schrittmotoren und anderer digitaler Steuerungstechnologien zur Anbindung eines Schrittmotors hin zu PC-basierten Systemen sind der Grund für die breite Akzeptanz von Schrittmotoren in letzter Zeit. Schrittmotoren sind die ideale Wahl für Automatisierungssysteme, die eine präzise Drehzahlregelung oder präzise Positionierung oder beides erfordern.
Wie wir wissen, werden viele industrielle Elektromotoren mit geschlossener Rückkopplungssteuerung verwendet, um eine präzise Positionierung oder präzise Geschwindigkeitssteuerung zu erreichen, auf der anderen Seite kann ein Schrittmotor betrieben werden ein Open-Loop-Controller. Dies reduziert wiederum die Gesamtsystemkosten und vereinfacht die Maschinenkonstruktion im Vergleich zu einer Servosystemsteuerung. Lassen Sie uns kurz über Schrittmotoren und ihre Typen sprechen . 
- Verwandter Beitrag:Servomotor – Typen, Konstruktion, Arbeitsweise und Anwendungen
Was ist ein Schrittmotor?
Schrittmotor ist ein bürstenloses elektromechanisches Gerät, das die Folge elektrischer Impulse, die an ihren Erregerwicklungen angelegt werden, in eine präzise definierte schrittweise mechanische Wellendrehung umwandelt. Die Welle des Motors dreht sich für jeden diskreten Impuls um einen festen Winkel. Diese Drehung kann linear oder winklig sein. Es wird eine Schrittbewegung für einen einzelnen Impulseingang erzeugt.
Wenn eine Impulsfolge angelegt wird, wird sie um einen bestimmten Winkel gedreht. Der Winkel, um den sich die Schrittmotorwelle bei jedem Impuls dreht, wird als Schrittwinkel bezeichnet, der im Allgemeinen in Grad ausgedrückt wird.
Die Anzahl der an den Motor gegebenen Eingangsimpulse entscheidet über den Schrittwinkel und somit wird die Position der Motorwelle durch die Steuerung der Anzahl der Impulse gesteuert. Diese einzigartige Eigenschaft macht den Schrittmotor gut geeignet für Steuersysteme mit offener Schleife, bei denen die genaue Position der Welle mit einer genauen Anzahl von Impulsen ohne Verwendung eines Rückkopplungssensors beibehalten wird.
Wenn der Schrittwinkel kleiner ist, ist die Anzahl der Schritte pro Umdrehung größer und die Genauigkeit der erhaltenen Position höher. Die Schrittwinkel können so groß wie 90 Grad und so klein wie 0,72 Grad sein, die üblicherweise verwendeten Schrittwinkel sind jedoch 1,8 Grad, 2,5 Grad, 7,5 Grad und 15 Grad.
Die Drehrichtung der Welle hängt von der Impulsfolge ab, die an den Stator angelegt wird. Die Drehzahl der Welle oder die durchschnittliche Motordrehzahl ist direkt proportional zur Frequenz (der Rate der Eingangsimpulse) von Eingangsimpulsen, die an Erregerwicklungen angelegt werden. Daher dreht sich der Schrittmotor bei niedriger Frequenz schrittweise und bei hoher Frequenz aufgrund der Trägheit kontinuierlich wie ein Gleichstrommotor.
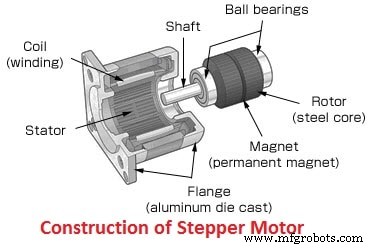
Wie alle Elektromotoren hat er Stator und Rotor. Der Rotor ist der bewegliche Teil, der keine Wicklungen, Bürsten und einen Kommutator hat. Normalerweise sind die Rotoren entweder variable Reluktanz oder Permanentmagnete. Der Stator ist häufig mit mehrpoligen und mehrphasigen Wicklungen aufgebaut, normalerweise aus drei- oder vierphasigen Wicklungen, die für eine erforderliche Anzahl von Polen gewickelt sind, die durch die gewünschte Winkelverschiebung pro Eingangsimpuls bestimmt wird.
Im Gegensatz zu anderen Motoren arbeitet er mit programmierten diskreten Steuerimpulsen, die über einen elektronischen Antrieb an die Statorwicklungen angelegt werden. Die Drehung erfolgt aufgrund der magnetischen Wechselwirkung zwischen den Polen der nacheinander erregten Statorwicklung und den Polen des Rotors.
Es gibt mehrere Arten von Schrittmotoren sind auf dem heutigen Markt in einer Vielzahl von Größen, Schrittzahlen, Konstruktionen, Verdrahtungen, Getrieben und anderen elektrischen Eigenschaften erhältlich. Da diese Motoren in der Lage sind, diskret zu arbeiten, eignen sie sich gut für die Schnittstelle mit digitalen Steuergeräten wie Computern.
Aufgrund der präzisen Steuerung von Geschwindigkeit, Drehung, Richtung und Winkelposition sind diese von besonderem Interesse in industriellen Prozesssteuerungssystemen, CNC-Maschinen, Robotik, Fertigungsautomatisierungssystemen und Instrumentierung.
- Verwandter Beitrag:Bürstenloser Gleichstrommotor – Konstruktion, Arbeitsprinzip und Anwendungen
Arten von Schrittmotoren
Es gibt drei grundlegende Kategorien von Schrittmotoren , nämlich
- Permanentmagnet-Schrittmotor
- Schrittmotor mit variabler Reluktanz
- Hybrid-Schrittmotor
Bei all diesen Motoren werden Erregerwicklungen im Stator verwendet, wobei sich die Anzahl der Wicklungen auf die Anzahl der Phasen bezieht.
Eine Gleichspannung wird als Erregung an die Spulen der Wicklungen angelegt und jeder Wicklungsanschluss ist über einen Festkörperschalter mit der Quelle verbunden. Abhängig von der Art des Schrittmotors ist sein Rotordesign wie ein Weichstahlrotor mit ausgeprägten Polen, ein zylindrischer Permanentmagnetrotor und ein Permanentmagnet mit Weichstahlzähnen aufgebaut. Lassen Sie uns diese Typen im Detail besprechen.
- Sie können auch lesen:Dreiphasiger Motoranschluss Stern/Dreieck (Y-Δ) Rückwärts/Vorwärts mit Timer Power &Control Diagramm
Schrittmotor mit variabler Reluktanz
Es ist der Grundtyp eines Schrittmotors die seit langem besteht und die einfachste Möglichkeit bietet, das Funktionsprinzip aus struktureller Sicht zu verstehen. Wie der Name schon sagt, hängt die Winkelposition des Rotors von der Reluktanz des magnetischen Kreises ab, der zwischen den Statorpolen (Zähnen) und den Rotorzähnen gebildet wird.

Konstruktion eines Schrittmotors mit variabler Reluktanz
Er besteht aus einem gewickelten Stator und einem Vielzahnrotor aus Weicheisen. Der Stator hat einen Stapel aus Siliziumstahlblechen, auf die Statorwicklungen gewickelt sind. Üblicherweise ist er für drei Phasen gewickelt, die auf die Polpaare verteilt sind.
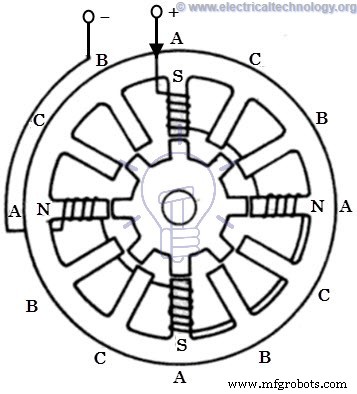
Die Anzahl der so gebildeten Pole auf dem Stator ist gleich einem geraden Vielfachen der Anzahl der Phasen, für die Wicklungen auf den Stator gewickelt werden. In der Abbildung unten hat der Stator 12 gleichmäßig beabstandete vorstehende Pole, wobei jeder Pol mit einer Erregerspule gewickelt ist. Diese drei Phasen werden mit Hilfe von Halbleiterschaltern von einer Gleichstromquelle gespeist.
Der Rotor trägt keine Wicklungen und ist ein ausgeprägter Poltyp, der vollständig aus geschlitzten Stahlblechen besteht. Die vorstehenden Zähne des Rotorpols haben die gleiche Breite wie die der Statorzähne. Die Polzahl des Stators unterscheidet sich von der Polzahl des Rotors, wodurch der Motor selbst gestartet und in beide Richtungen gedreht werden kann.
Das Verhältnis der Rotorpole zu den Statorpolen für einen Dreiphasen-Schrittmotor wird wie folgt angegeben:Nr =Ns ± (Ns / q). Hier ist Ns =12 und q=3 und somit Nr =12 ± (12 / 3) =16 oder 8. Ein 8-poliger Konstruktionsrotor ohne Erregung ist unten dargestellt.
Funktionsweise des Schrittmotors mit variabler Reluktanz
Der Schrittmotor funktioniert nach dem Prinzip dass sich der Rotor in einer bestimmten Position mit den Zähnen des Erregerpols in einem Magnetkreis ausrichtet, in dem ein minimaler Widerstandspfad vorhanden ist. Immer wenn Strom an den Motor angelegt wird und eine bestimmte Wicklung erregt wird, erzeugt er sein Magnetfeld und entwickelt seine eigenen Magnetpole.
Aufgrund des Restmagnetismus in den Rotormagnetpolen wird der Rotor veranlasst, sich in eine solche Position zu bewegen, um eine minimale Reluktanzposition und somit einen Satz Rotorpole zu erreichen mit dem erregten Polsatz des Stators ausgerichtet ist. An dieser Position stimmt die Achse des Statormagnetfelds mit der Achse überein, die durch zwei beliebige Magnetpole des Rotors verläuft.
Wenn der Rotor mit den Statorpolen ausgerichtet ist, hat er genug Magnetkraft, um die Welle daran zu hindern, sich in die nächste Position zu bewegen, entweder im oder gegen den Uhrzeigersinn.
Betrachten Sie das schematische Diagramm eines 3-Phasen-Motors mit 6 Statorpolen und 4 Rotorzähnen, wie in der Abbildung unten gezeigt. Wenn die Phase A-A' durch Schließen des Schalters -1 mit einer Gleichstromversorgung versorgt wird, wird die Wicklung zu einem Magneten, wodurch ein Zahn nach Norden und der andere nach Süden wird. Die Magnetachse des Stators liegt also entlang dieser Pole.
Aufgrund der Anziehungskraft zieht der Nordpol der Statorspule den nächsten Rotorzahn mit entgegengesetzter Polarität an, d. h. Süd- und Südpol ziehen den nächsten Rotorzahn mit entgegengesetzter Polarität an, d. h. Nord. Der Rotor stellt sich dann auf seine Position mit minimalem Widerstand ein, wo die Magnetachse des Rotors exakt mit der Magnetachse des Stators übereinstimmt.
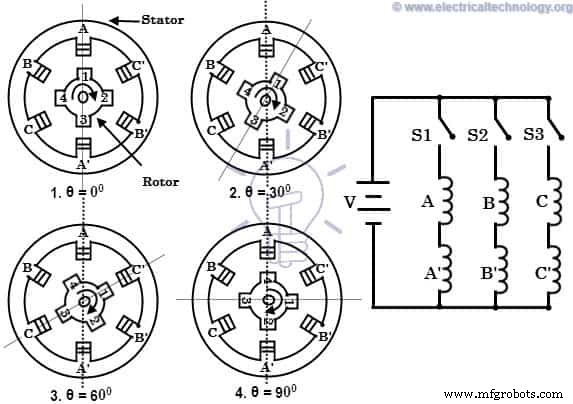
Wenn die Phase B-B' aktiviert wird durch Schließen des Schalters -2, wobei die Phase A-A' gehalten wird, bleiben durch Öffnen des Schalters-1 entregt, die Wicklung B-B' wird den magnetischen Fluss erzeugen, und daher verschiebt sich die Magnetachse des Stators entlang der so von ihr gebildeten Pole. Daher verschiebt sich der Rotor mit magnetisierten Statorzähnen auf den geringsten Widerstand und dreht sich um einen Winkel von 30 Grad im Uhrzeigersinn.
Wenn der Schalter-3 nach dem Öffnen von Schalter-2 erregt wird, wird die Phase C-C' erregt, die Rotorzähne richten sich mit der neuen Position aus, indem sie sich um einen zusätzlichen Winkel von 30 bewegen Grad. Auf diese Weise bewegt sich der Rotor durch aufeinanderfolgendes Erregen von Statorwicklungen in einer bestimmten Reihenfolge im Uhrzeigersinn oder gegen den Uhrzeigersinn. Der Schrittwinkel dieses 3-Phasen-4-Pol-Rotorzahn-Schrittmotors wird ausgedrückt als 360/ (4 × 3) =30 Grad (als Schrittwinkel =360 / Nr × q).
Der Schrittwinkel kann weiter reduziert werden, indem man die Polzahl von Stator und Rotor erhöht, in diesem Fall werden Motoren oft mit zusätzlichen Phasenwicklungen gewickelt. Dies kann auch durch eine andere Konstruktion von Schrittmotoren erreicht werden wie Multistack-Anordnung und Untersetzungsgetriebe.
- Sie können auch lesen:Dreiphasen-Motoranschluss STERN/DREIECK ohne Timer Leistungs- und Steuerdiagramme
Permanentmagnet-Schrittmotor
Der Motor mit Permanentmagnet-Design ist vielleicht der gebräuchlichste unter mehreren Arten von Schrittmotoren. Wie der Name schon sagt, fügt es der Motorkonstruktion Permanentmagnete hinzu. Diese Art von Schrittmotoren wird auch als Can-Stack-Motor bezeichnet oder Blechdosenmotor . Der Hauptvorteil dieses Motors sind seine niedrigen Herstellungskosten. Dieser Motortyp hat 48-24 Schritte pro Umdrehung.

Konstruktions-Permanentmagnet-Schrittmotor
Bei diesem Motor ist der Stator mehrpolig und seine Konstruktion ähnelt der des oben beschriebenen Schrittmotors mit variabler Reluktanz. Es besteht aus einem geschlitzten Umfang, auf dem Statorspulen gewickelt sind. Es hat hervorstehende Pole auf der geschlitzten Struktur, wo die gewickelten Wicklungen zwei-, drei- oder vierphasig sein können.
Die Endanschlüsse all dieser Wicklungen werden herausgekauft und über Festkörperschalter in der Treiberschaltung mit der Gleichstromerregung verbunden.
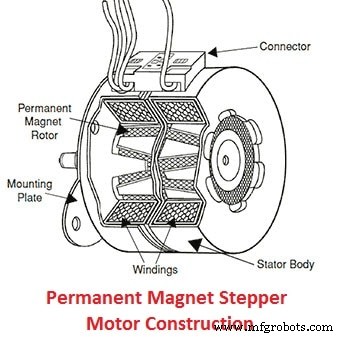
Der Rotor besteht aus einem Permanentmagnetmaterial wie ein Ferrit, der entweder die Form eines zylindrischen oder hervorstehenden Pols haben kann, aber normalerweise ist er vom glatten zylindrischen Typ. Der Rotor wurde entwickelt, um eine gerade Anzahl von Permanentmagnetpolen mit abwechselnden Nord- und Südpolen zu haben.
Arbeitsweise des Permanentmagnet-Schrittmotors
Der Betrieb dieses Motors funktioniert nach dem Prinzip, dass ungleiche Pole sich anziehen und gleiche Pole sich abstoßen. Wenn die Statorwicklungen mit einer Gleichstromversorgung erregt werden, erzeugt dies einen Magnetfluss und stellt die Nord- und Südpole her. Aufgrund der Anziehungs- und Abstoßungskraft zwischen Permanentmagnet-Rotorpolen und Statorpolen beginnt der Rotor, sich nach oben zu der Position zu bewegen, für die Impulse an den Stator gegeben werden.
Stellen Sie sich einen 2-Phasen-Schrittmotor mit zwei permanentmagnetischen Rotorpolen vor, wie in der Abbildung unten gezeigt.
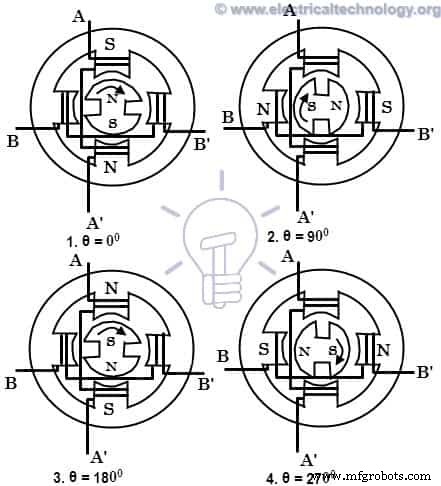
Wenn Phase A mit positivem Strom versorgt wird In Bezug auf das A' bilden die Windungen Nord- und Südpole. Aufgrund der Anziehungskraft richten sich die Rotorpole mit den Statorpolen aus, so dass die Magnetpolachse des Rotors mit der des Stators übereinstimmt, wie in Abbildung gezeigt.
Wenn die Erregung auf Phase B umgeschaltet und Phase A ausgeschaltet wird, passt sich der Rotor weiter an die magnetische Achse von Phase B an und dreht sich somit um 90 Grad im Uhrzeigersinn.
P>Wenn als nächstes die Phase A mit einem negativen Strom in Bezug auf A' erregt wird, bewirkt die Bildung von Statorpolen, dass sich der Rotor um weitere 90 Grad im Uhrzeigersinn bewegt.
In gleicher Weise dreht sich der Rotor um weitere 90 Grad in die gleiche Richtung, wenn Phase B durch Schließen des Schalters von Phase A mit negativem Strom erregt wird. Wenn die Phase A als nächstes mit positivem Strom erregt wird, kommt der Rotor in die ursprüngliche Position und macht somit eine vollständige Umdrehung von 360 Grad. Dies impliziert, dass der Rotor dazu neigt, sich um 90 Grad im Uhrzeigersinn zu drehen, wenn der Stator erregt wird.
Der Schrittwinkel dieses 2-Phasen-2-Pol-Permanentmagnetrotormotors wird ausgedrückt als 360/ (2 × 2) =90 Grad. Die Schrittgröße kann reduziert werden, indem zwei Phasen gleichzeitig erregt werden oder eine Folge von 1-phasigen EIN- und 2-phasigen EIN-Modi mit der richtigen Polarität.
- Sie können auch lesen:Begriffe und Definitionen in Bezug auf Motorsteuerung und -schutz
Hybrid Stepper Motor
It is the most popular type of stepper motor as it provides better performance than permanent magnet rotor in terms of step resolution, holding torque and speed. However, these motors are more expensive than PM stepper motors. It combines the best features of both variable reluctance and permanent magnet stepper motors. These motors are used in applications that require very small stepping angle such as 1.5, 1.8 and 2.5 degrees.

Construction of Hybrid Stepper Motor
The stator of this motor is same as its permanent magnet or reluctance type counterpart. The stator coils are wound on alternate poles. In this, the coils of different phases are wound on each pole, usually two coils at a pole which is referred as a bifilar connection.
The rotor consists of a permanent magnet which is magnetized in axial direction to create a pair of magnetic poles (N and S poles). Each pole is covered with uniformly spaced teeth. The teeth are made up of soft steel and two section, of which on each pole are misaligned each other by a half-tooth pitch.
- Related Post Why Electric Motors rated in kW instead of kVA?
Working of Hybrid Stepper Motor
This motor works similar to that of permanent magnet stepper motor. The figure above shows 2-phase, 4-pole, 6-tooth rotor hybrid stepper motor. When the phase A-A’ is excited with a DC supply, keeping B-B’ unexcited, the rotor aligns such that the south pole of the rotor faces north pole of the stator while north pole of rotor faces south pole of the stator.
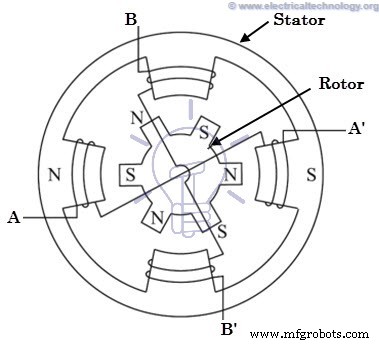
Now, if the phase B-B’ is excited, keeping A-A’ switched off in such a way that upper pole becomes north and lower becomes south, then the rotor will align to a new position by moving through counterclockwise direction. If the phase B-B’ is oppositely excited such that the upper pole becomes south and lower becomes north, then the rotor will turn clockwise direction.
By a proper sequence of pulses to the stator, the motor will turn in desired direction. For every excitation, rotor will get locked into new position, and even if excitation is removed motor still maintains its locked condition due to the permanent magnet excitation. The step angle of this 2-phase, 4-pole, 6-tooth rotor motor is given as 360/ (2 × 6) =30 degrees. In practice, hybrid motors are constructed with more number of rotor poles in order to get high angular resolution.
- Related Post:What is Motor Efficiency &How to improve it?
Unipolar and Bipolar Stepper Motors
The above discussed motors can be unipolar or bipolar based on the coil winding arrangements. A unipolar motor is employed with two windings per phase and hence the direction of current flow through these windings changes the rotation of the motor. In this configuration, the current flow is through one direction in one coil and opposite direction in another coil.
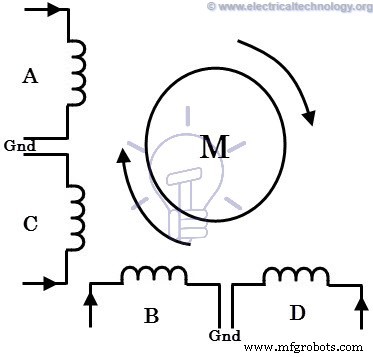
The figure below shows 2-phase unipolar stepper motor wherein A and C coils are for one phase and B and D are for other phase. In each phase each coil carries current in opposite direction to that of other coil. Only one coil will be carrying current at a time in each phase for achieving particular direction of rotation. So just by switching the terminals to each coil, the direction of rotation is controlled.
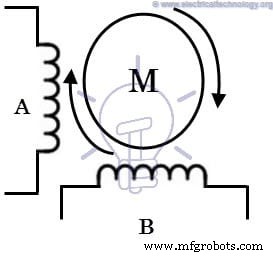
In case of a bipolar stepper motor, each phase consists of a single winding rather than two in case of unipolar one. In this, the direction of rotation is controlled by reversing the current through the windings. Hence, it requires a complex drive circuit for current reversal.
- You may also read:What is a Solenoid and Solenoid Magnetic Field
Stepping Modes of a Stepper Motor
A typical stepping action causes the motor to step through a sequence of equilibrium positions in response to current pulses given to it. It is possible to vary the stepping action in different ways simply by changing the sequence through which stator windings are energized. The following are the most common operating or driving modes of stepper motors.
- Wave step
- Full step
- Half step
- Microstepping
Wave Step Mode
Wave step mode is the simplest of all other modes in which only one winding is energized at any given time. Each coil of the phase is connected to the supply alternatively. The table below shows the order through which coils are energized in a 4-phase stepper motor.
In this mode motor gives maximum step angle compared to all other modes. It is the simplest and most commonly used mode for stepping; however the torque produced is less as it uses some part of the total winding at a given time. 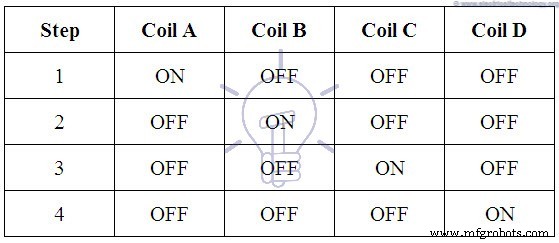
Full Step Mode
In this drive or mode, two stator phases are energized simultaneously at any given time. When two phases are energized together, the rotor will experience the torque from both phases and comes to the equilibrium position, which will be interleaved between two adjacent wave step positions or 1-phase excitations. So this step provides better holding torque than wave step. The table below shows the full step drive for 4-phase stepper motor. 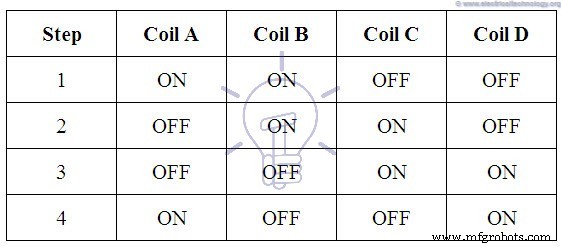
Half Step Mode
It is the combination of both wave and full step modes. In this, single phase and dual phase excitations are carried out alternatively, i.e., one-phase ON, two-phases ON, and so on. The step angle in this mode becomes half of the full step angle. This drive mode has highest torque and stability compared to all other modes. The table containing phase pulsing sequence for a 4-phase motor in half stepping is given below. 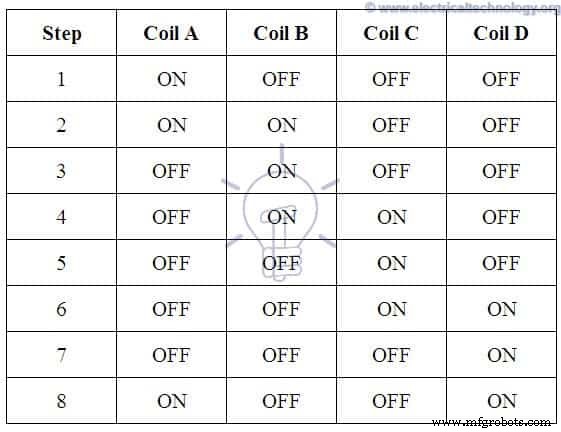
Microstepping Mode
In this mode, each motor step is subdivided into several small steps, even hundreds of fixed positions, therefore a greater positioning resolution is obtained. In this, currents through the windings are continually varied in order to get very small steps. In this, two phases are excited simultaneously, but with the unequal currents in each phase.
For example, the current through phase -1 is held constant while the current through phase-2 is incremented in steps till the maximum value of current, whether it is negative or positive. The current in the phase-1 is then decreased or increased in steps till zero. Thus, the motor will produce a small step size.
All these stepping modes can be obtained by each type of stepper motor discussed above. However, the direction of current in each winding during these steps can be varied depending on the type of motor and either it is unipolar or bipolar.
- Related Post Cable Size Calculation for LT &HT Motors
Advantages of Stepper Motor
- At standstill position, the motor has full torque. No matter if there is no moment or changing position.
- It has a good response to starting, stopping and reversing position.
- As there is no contact brushes in the stepper motor, It is reliable and the life expectancy depends on the bearings of the motor.
- The motor rotation angle is directly proportional to the input signals.
- It is simple and less costly to control as motor provides open loop control when responding to the digital input signals.
- The motor speed is directly proportional to the input pulses frequency, this way a wide range of rotational speed can be achieved.
- When load is coupled to the shaft, it is still possible to realize the synchronous rotation with low speed.
- The exact positioning and repeatability of movement is good as it has a 3-5% accuracy of a step where the error is non cumulative from one step to another.
- Stepper motors are safer and low cost (as compared to servo motors), having high torque at low speeds, high reliability with simple construction which operates at any environment.
Disadvantages of Stepper Motors
- Stepper motors having low Efficiency.
- It has low Accuracy.
- Its torque declines very quickly with speed.
- As stepper motor operates in open loop control, there is no feedback to indicate potential missed steps.
- It has low torque to inertia ratio means it can’t accelerate the load very quickly.
- They are noisy.
Applications of Stepper Motors
- Stepper motors are used in automated production equipments and automotive gauges and industrial machines like packaging, labeling, filling and cutting etc.
- It is widely used in security devices such as security &surveillance cameras.
- In medical industry, stepper motors are widely used in samples, digital dental photography, respirators, fluid pumps, blood analysis machinery and medical scanners etc.
- They are used in consumer electronics in image scanners, photo copier and printing machines and in digital camera for automatic zoom and focus functions and positions.
- Stepper motors also used in elevators, conveyor belts and lane diverters.
Sie können auch lesen:
- DC Drives – Construction, Working &Classification of Electrical DC Drives
- Three Phase Motor Power &Control Wiring Diagrams
- Electric Motors Library (AC &DC )
Industrietechnik
- Was ist 3D-Druck? Arbeitsprinzip | Typen | Anwendungen
- Was ist Stempeln? - Arten, Betrieb und Anwendung
- Was ist Drehen? - Definition und Arten von Operationen
- Was ist Schweißen? - Definition | Arten des Schweißens
- Was ist Casting?- Definition| Arten des Gießens
- Was sind Power Hammers? - Arten, Design und Betrieb
- Wofür wird Monel verwendet?
- Was sind die verschiedenen Arten von Kellerkonstruktionen?
- Was ist ein Strongback?
- Was ist ein Linearmotor?