


Motorschutz – Fehlerarten und Schutzeinrichtungen
Arten von Motorfehlern und Schutzvorrichtungen
Häufige Motorausfälle und -fehler
Es ist wichtig, Motorausfälle und -fehler zu kennen und zu verstehen um die am besten geeigneten Schutzvorrichtungen zu definieren für jeden Fall . Sie müssen auch wichtige Begriffe in Bezug auf Motorsteuerung und -schutz kennen.
Sie sind nicht statische Maschinen Motoren elektrischen und mechanischen Belastungen ausgesetzt sind .
Motorfehler gibt es in drei Grundtypen :Elektrik, Mechanik und Mechanik, die fortschreitet in elektrische .
Häufige Arten von Motorausfällen und Fehlern sind:
- Lagerschaden
- Durchschlag der Isolierung
- Blockierter Rotor
- Überhitzung
- Überlastungen (elektrisch und mechanisch)
- Phasenunsymmetrie und jede Spannungsunsymmetrie führen zu einer noch höheren Stromunsymmetrie.
- Rückwärtsfahrt
- Wellenfehlausrichtung
- Vibration
Überhitzung kann durch Unterdimensionierung des Motors entstehen , unzureichende Kühlung bei niedriger Drehzahl bei Verwendung von Festplatten mit variabler Geschwindigkeit (VSD ), Änderungen an der Last am Motor wie eingeklemmte Geräte und heiße Umgebungsbedingungen .
Durchbruch der Isolierung , was zu verbrannten Wicklungen führt , Kurzschluss bedeuten entweder im Motor oder im Stromversorgungskreis für den Motor , und kann durch Überhitzung, Überlastung und Überspannung verursacht werden .
Etwa 80 % von Ausfällen von Elektromotoren sind Folge von Wicklungsschäden im Motorstator und Lagerfehler .
Lagerschaden an Motoren kann ein Hinweis sein der falschen Lager für die Bewerbung .
Ein vertikal montierter Motor braucht andere Lager dann ein Motor horizontal montiert . Ein Motor, der einen Groß- oder Mehrriemenantrieb antreibt werden Lager erfordern, die große radiale Belastungen bewältigen können . Ein Motor verschraubt zu einer verzerrten Grundplatte wird sich verdrehen .
Lager sind normalerweise klein im Vergleich zu anderen wichtigen Motorkomponenten , was sie besonders anfällig für Beschädigung und Verschleiß macht; Einige Studien machen mehr als die Hälfte aller Motorausfälle auf Fehlfunktionen der Lager zurückzuführen , die meistens auf zu wenig oder zu viel Schmierung zurückzuführen sind . Eine weitere wichtige Ursache für Lagerversagen ist Fehlausrichtung .
Wellenfehlausrichtung wird zerstören Lager lange vor ihrem vollen Berufsleben . Die Motorwelle muss direkt mit der angetriebenen Welle fluchten was nur erreicht werden kann unter Verwendung von Präzisionsausrichtungstechniken wie Laser .
Andere Probleme die bei Motoren auftreten können sind:
- Wasser und Staub dringen in die Statorspulen oder das Anschlussgehäuse ein und führen zu Kurzschlüssen
- Kippfuß-Motorfüße sind nicht eben angeschraubt
- Falsche Motorbefestigung oder Gehäusetyp
- Elektrische oder mechanische Unwucht
Rauschen weist auf motorische Probleme hin aber verursacht normalerweise keinen Schaden . Rauschen wird jedoch normalerweise von Vibrationen begleitet .
Vibration kann auf verschiedene Weise Schaden anrichten . Es neigt dazu, Wicklungen zu lockern und isoliert mechanisch beschädigt durch Reißen, Abplatzen oder Abrieb des Materials . Die Versprödung von Anschlussdrähten durch übermäßige Bewegung und Bürstenfunken an Kommutatoren oder Stromabnehmerringen resultiert auch aus Vibrationen.
Schließlich Vibration kann den Lagerausfall beschleunigen indem Kugeln dazu gebracht werden, Gleitlager zu „brinnieren“ aus der Form zu schlagen oder die Gehäuse in den Schalen zu lösen .
Bei Geräuschen oder Vibrationen befinden sich in einem laufenden Motor, der Quelle sollten schnell isoliert und korrigiert werden .
Was eine offensichtliche Quelle der Geräusche oder Vibrationen zu sein scheint, kann ein Symptom für ein verstecktes Problem sein. Daher ist oft eine gründliche Untersuchung erforderlich.
Lärm und Vibrationen kann durch eine falsch ausgerichtete Motorwelle verursacht werden oder auf den Motor übertragen werden kann von der angetriebenen Maschine oder Kraftübertragung . Sie können auch das Ergebnis elektrischer oder mechanischer Unwucht im Motor sein .
Elektrisches Ungleichgewicht entsteht bei der magnetischen Anziehung zwischen Stator und Rotor ist ungleichmäßig um Peripherie des Motors . Dadurch wird die Welle ausgelenkt während es sich dreht und ein erzeugt mechanische Unwucht . Elektrisches Ungleichgewicht weist normalerweise auf einen elektrischen Fehler hin B. eine offene Stator- oder Rotorwicklung , ein offener Balken oder Ring in Käfigläufermotoren oder kurzgeschlossene Feldspulen in Synchronmotoren . Ein ungleichmäßiger Luftspalt, normalerweise von stark verschlissenen Gleitlagern, erzeugt ebenfalls elektrisches Ungleichgewicht .
Die Hauptursachen für mechanische Unwucht Dazu gehören eine verzerrte Befestigung, eine verbogene Welle, ein schlecht ausgewuchteter Rotor, lose Teile am Rotor oder schlechte Lager . Rauschen kann auch von dem Lüfter kommen, der gegen den Rahmen, die Abdeckung oder Fremdkörper innerhalb der Abdeckung stößt . Wenn die Lager schlecht sind , was durch übermäßige Lagergeräusche angezeigt wird , muss bestimmt werden, warum die Lager ausgefallen sind .
Ein weiteres Problem, mit dem Motoren konfrontiert sein können, ist eine lange Startzeit . Wenn ein Motor vielen aufeinanderfolgenden Starts ausgesetzt ist , die Rotorwicklungen oder Rotorstäbe kann so weit erhitzt werden, dass die elektrischen Verbindungen zwischen den Rotorstäben und den Endringen beschädigt werden .
Motorschutzgeräte
Egal welche Nennspannung und Größe Motoren sind gegen Überstrom (Kurzschluss) und Überlastung geschützt .
Kleine und mittlere Niederspannungsmotoren sind in der Regel nur gegen Überlast und Kurzschluss geschützt und große Niederspannungsmotoren und Mittelspannungsmotoren haben auch andere Schutzmaßnahmen .
Überlast- und Überstromschutz müssen unempfindlich gegen Einschaltströme zum Startzeitpunkt sein , zu vermeiden vorzeitige Stromunterbrechung .
Für LV-Motoren der Schutz vor Überströmen und Kurzschlüssen kann durch Sicherungen erfolgen , in Verbindung mit Lasttrennschaltern oder Leistungsschaltern mit sofortiger Auslösung die sofort reagieren (fast augenblicklich ) Stromwerte bei Kurzschluss, Erdschluss oder Strom bei blockiertem Rotor .
Trägerzeitschalter haben sowohl thermische als auch sofortige Auslösefunktionen und sind so voreingestellt, dass sie bei standardisierten Pegeln auslösen .
Dies ist die häufigste Art von Schutzschaltern, die im Baugewerbe für Wohn-, Gewerbe- und Schwerbau verwendet werden.
Die thermische Wirkung dieses Schutzschalters reagiert auf Hitze . Wenn die Belüftungseinlässe und -auslässe eines Motors nicht ausreichen, um die Wärme von den Wicklungen abzuleiten des Motors wird die Wärme erkannt durch die thermische Einwirkung des Leistungsschalters .
Bei Kurzschluss auftreten sollte, die Magnetwirkung des Leistungsschalters erkennt die Momentanwerte des Stroms und löst den Leistungsschalter aus .
Sicherungen sind in der Regel nicht geeignet zum Schutz vor Überlastung , weil es so dimensioniert ist, dass es Überlastschutz bietet , würden sie durchbrennen, wenn der Motor aufgrund des hohen Motoreinschaltstroms startet , obwohl sie als Backup-Schutz vor Überlastung verwendet werden können .
Schutz mit Sicherungen birgt das Risiko eines einphasigen Schadens zum Motor, wenn nur eine Sicherung durchbrennt sofern kein einphasiger Schutz vorhanden ist; dieses Thema wird später in diesem Kapitel behandelt.
Große Niederspannungsmotoren und Mittelspannungsmotoren sind gegen Kurzschluss geschützt (Phase-zu-Phase und Phase-zu-Erde ) durch Überstromrelais (50; 50N; 51; 51N ) an CT angeschlossen .
Der Schutz vor Überlastung wird normalerweise durch thermisches Überlastrelais sichergestellt . Dieses Relais kann von den folgenden Typen sein:
Bimetallstreifen
Ein thermischer Überlastungsschutz unterzubringen der kurzzeitig hohe Anlaufstrom eines Motors während es präzise schützt es vor einer laufenden Stromüberlastung . Die Heizspirale und die Aktion des Bimetallstreifens eine Zeitverzögerung einführen das dem Motor Zeit zum Starten und Einschwingen in den normalen Betriebsstrom gibt ohne thermische Überlastauslösung . Schutz vor thermischer Überlastung kann manuell oder automatisch zurückgesetzt werden je nach Anwendung und haben einen Einsteller dadurch können sie genau auf den Motorlaufstrom eingestellt werden .
Umgebungstemperatur in dem sich ein Anlasser und ein Motor befinden zu beachten bei der Auswahl von Bimetallrelais weil eine hohe Umgebungstemperatur die Überlastauslösezeit verkürzt .
Reduzierte Auslösezeit bei Überlastung kann zu Fehlauslösungen führen wenn sich ein Motor in einer kühleren Umgebungstemperatur als der Anlasser befindet und führt zu motorischem Burnout wenn sich der Motor in einer heißeren Umgebungstemperatur befindet als der Anlasser .
Die meisten Wärmeüberlastungsgeräte sind für die Verwendung bei einer maximalen Temperatur von 40 °C ausgelegt , und eine Leistungsreduzierung des Relais kann erforderlich sein .
Die meisten Relais sind über einen Bereich einstellbar von 85 % auf 115 % ihres Wertes.
Einige Modelle sind mit Umgebungskompensation erhältlich . Ein umgebungskompensiertes Gerät Reisepunkt wird nicht von der Umgebungstemperatur beeinflusst und arbeitet konstant bei demselben Stromwert.
Diese Art von Relais wird üblicherweise bei Niederspannungsmotoren kleiner und mittlerer Größe verwendet .
Standards und Herstellerangaben zeigen normalerweise empfohlene Regulierungssollwerte dieser Art von Relais in Übereinstimmung mit Nennleistung des Motors; dieselben Tabellen zeigen auch empfohlene Bemessungsströme von Sicherungen (Typ aM oder gG – siehe Abschnitt 2.4) und Schnellschalter die den Relais für den Überstromschutz zugeordnet sind , wie in Tabelle 3 gezeigt.
Tabelle 3 – Bemessungsstrom der Sicherungen für den Motorschutz 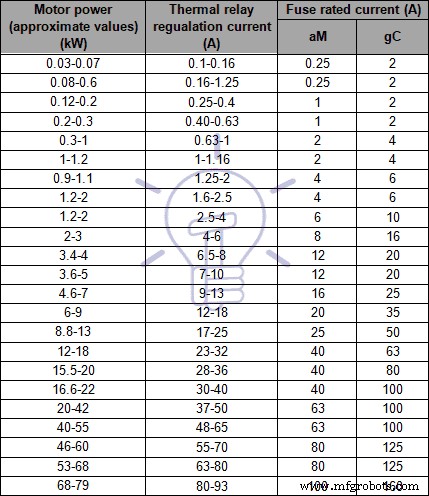
Elektronische digitale Überlastrelais
Diese Schutzart wird für große Niederspannungsmotoren und Hochspannungsmotoren verwendet , und enthält einen Mikroprozessor . Diese Geräte können die Erwärmung der Motorwicklungen modellieren, indem sie den Motorstrom überwachen, und sie können auch Mess- und Kommunikationsfunktionen beinhalten.
Gemeinsamer Schutz von großen Niederspannungsmotoren und Mittelspannungsmotoren erfolgt in der Regel durch folgende Schutzeinrichtungen:
- Überlastschutz:49
- Unverzögerter Phasenüberstrom:50
- Sofortiger Erdüberstrom:50N/50G
- Zeitverzögerung Phasenüberstrom:51
- Zeitverzögerung Erdüberstrom:51N/51G
In manchen Situationen Es wird nicht empfohlen, Motoren vor Überlastung zu schützen; das ist der Fall bei Löschwasserpumpen und Entrauchungsventilatoren .
Sehr große LV-Motoren und MV-Motoren sind teuer, und es ist normalerweise ratsam, umfassendere Schutzsysteme bereitzustellen . Zu diesen Schemata gehören:
- Lagertemperaturüberwachung und -schutz (38 )
- Differentialschutz (87M )
- Unvollständige Startsequenz / Schutz vor langer Startzeit (66 )
- Negative Phasenfolge (Phasenumkehrschutz )
- Überhitzungsschutz
- Phasenasymmetrie- oder Phasenausfallschutz (47 )
- Stall- oder blockierter Rotorschutz
- Unter- und Überspannungsschutz (27 und 59 )
- Vibrationsüberwachung und -schutz (39)
- Wicklungstemperaturwächter und Schutzgeräte
Differentialschutz für LV- und HV-Motoren
Unterschiedlicher Schutz wird häufig für mittlere und große Motoren bereitgestellt mit Versorgungsspannungen von größer als ca. 4 kV , und elektrisch betrieben (Rangierauslöser )Schutzschalter . Der Differentialschutz bietet Hochgeschwindigkeitsrichtung und Beseitigung von Fehlern an den Motorstatorwicklungen .
- Lesen Sie auch:So berechnen Sie die Kabelgröße für LT- und HT-Motoren
Wo das Stromversorgungssystem fest geerdet ist, erkennt der Differentialschutz sowohl Leiter-Leiter- als auch Leiter-Erde-Fehler .
Mit differenziellem Schutz Der Strom an jedem Ende jeder Wicklung wird verglichen, um festzustellen, ob ein Fehlerzustand vorliegt .
Diese Funktion erfordert zwei CT-Sätze , einer am Anfang des Motorabgangs und der andere am Sternpunkt .
Die differenzielle Schutzfunktion kann nur verwendet werden wenn beide Seiten jeder Statorphase zum externen Anschluss aus dem Motor herausgeführt werden so dass der Phasenstrom in jede Phase ein- und ausgeht kann gemessen werden . Das Differentialelement subtrahiert den Strom, der aus jeder Phase kommt, von dem Strom, der in jede Phase fließt, und vergleicht das Ergebnis oder die Differenz mit dem differentiellen Ansprechpegel.
Wenn diese Differenz gleich oder größer als der Aufnahmepegel ist, kommt es zu einer Auslösung .
Abbildung 19 zeigt ein Beispiel für diesen Schutz. 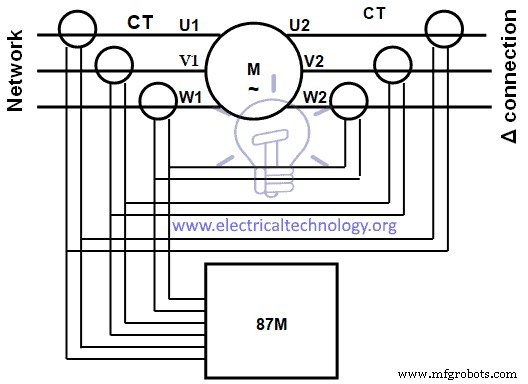
Abbildung 19 – Motordifferentialschutz
Mit sechs CT in einer summierenden Konfiguration , während des Motorstarts sind die Werte der beiden Stromwandler in jeder Phase möglicherweise nicht gleich l als CT sind nicht vollkommen identisch und asymmetrische Ströme kann dazu führen, dass der CT in jeder Phase unterschiedliche Ausgänge hat .
Um lästiges Auslösen zu verhindern in dieser Konfiguration die Differenzialebene muss eventuell weniger empfindlich eingestellt werden , oder die differentielle Zeitverzögerung muss möglicherweise verlängert werden, um den Problemzeitraum während des Motorstarts zu überbrücken .
Die laufende differentielle Verzögerung kann dann fein abgestimmt werden einer Anwendung so anpassen, dass sie sehr schnell reagiert und ist empfindlich gegenüber niedrigen Differenzstrompegeln .
Wicklungen überhitzen Der Schutz erfolgt normalerweise mit Widerstandstemperaturfühlern (FTE ) und Thermistor und Geräte automatisch herunterfahren installiert werden kann. Anbringen eines separaten Booster-Lüfters um den Motorlüfter zu unterstützen löst das Überhitzungsproblem wenn ein VSD dient zur Steuerung der Motordrehzahl eed.
Unvollständige Startsequenz / lange Startzeit führt zur Überhitzung des Rotors .
Da es nicht möglich ist, die Wärme des Rotors bei Käfigläufermotoren physikalisch zu messen ist notwendig, um die Wärme zu bestimmen durch Messen des Stroms, den der Rotor durch den Stator zieht um den Rotor anzuregen. Eine thermische Nachbildung des Rotors wird über ein I 2 ermittelt t Kurve .
Die Neustartsperre wird den Benutzer daran hindern, den Motor zu starten wenn das Relais feststellt, dass der Rotor eine Temperatur erreicht hat, die den Rotor beschädigt sollte ein Start versucht werden . Das Relais lässt also nur einen Neustart zu wenn der Rotor eine ausreichende thermische Reserve zum Starten hat .
Lagerschutz wird normalerweise von RTD durchgeführt und der Hermistor um die Temperatur zu überwachen .
Vibrationsschutz verwendet Sensoren/Beschleunigungsmesser die normalerweise an wichtigen Stellen am Motor und den Lagern platziert werden .
Da die Lager sind der lasttragende Teil des mechanischen Antriebsstrangs, Beschleunigungsmesser sollte am Ein- und Ausgang platziert werden
Abbildung 20 zeigt ein Beispiel für Vibrationssensoren und empfohlene Positionen. 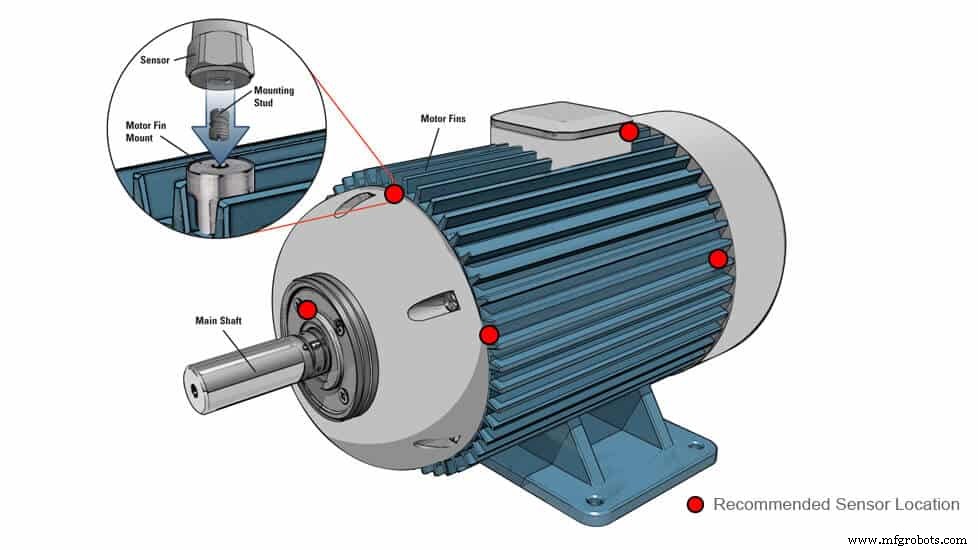
Abbildung 20 – Motorvibrationssensoren
Heutzutage IED (siehe Abschnitt 2.1), die alle erforderlichen Schutzfunktionen zusammenfassen werden üblicherweise für große LV-Motoren und MV-Motoren verwendet .

Über den Autor:Manuel Bolotinha
-Lizenziat in Elektrotechnik – Energie- und Stromversorgungssysteme (1974 – Instituto Superior Técnico/Universität Lissabon)– Master in Elektrotechnik und Computertechnik (2017 – Faculdade de Ciências e Tecnologia/Nova University of Lisbon)
– Leitender Berater für Umspannwerke und Energiesysteme; Professioneller Ausbilder
Industrietechnik
- Was ist Rapid Prototyping? - Arten und Funktionsweise
- Was ist additive Fertigung? - Typen und Arbeitsweise
- Was ist Löten? - Typen und wie man lötet
- Was sind Walzwerke und ihre Typen?
- Was ist Widerstandsschweißen? - Typen und Funktionsweise
- Was ist Formsand? - Arten und Eigenschaften
- Was ist thermisches Spritzen? - Typen und Anwendung
- Elektroerosionsmaschinen (EDM) Typen, Vor- und Nachteile
- Drehoperationen und Schneidwerkzeuge
- Bedeutung und Typen des Herstellungsprozesses