


Verwendung der ServoTimer2-Bibliothek (einfache Erklärung) Servo-Sweep
Komponenten und Verbrauchsmaterialien
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Über dieses Projekt
Einführung
Ich habe vor kurzem versucht, einen humanoiden Roboter zu bauen - was bedeutet, sich mit Servomotoren zu befassen. Alles funktionierte genauso gut, kurz bevor ich versuchte, den Roboter zum SPRECHEN zu bringen. Als ich die TMRpcm-Bibliothek verwenden musste. Aber es gibt einige Bibliotheken wie
#TMRpcm.h#VirtualWire.h sind Bibliotheken, die den Timer1 von Arduino verwenden. Es scheint, dass Sie nicht zwei Geräte gleichzeitig verwenden können, wenn beide denselben Timer verwenden ... Wenn mein Roboter also spricht, funktionieren die Servos nicht. Da sowohl der Servo.h als auch der TMRpcm auf Arduino TImer1 funktionieren. Was ein Durcheinander ist. Wenn Sie beide zum Laufen bringen möchten, müssen Sie eine andere Bibliothek für Servos verwenden. Was ist die ServoTimer2-Bibliothek? Dies verwendet den Timer2 auf Arduino ... Leider habe ich im Internet keine Tutorials gefunden, um zu verstehen, wie diese ServoTimer2-Bibliothek tatsächlich funktioniert und wie man sie im Code verwendet. Also habe ich beschlossen, ein Tutorial zu machen, damit Leute wie ich es besser verstehen können. Wir verwenden einen Servomotor mit dieser Bibliothek und erstellen einen einfachen Servo-Sweep-Code
Sie können sich das Video ansehen, um es besser zu verstehen.
Schritt 1:Teile &Montage:




Hauptteil ist ein Servomotor.
Ich verwende ein Mikroservo sg90, jedes Modell ist in Ordnung.
Nehmen Sie dann einen Servoarm wie in Bild 2 und kleben Sie ihn auf einen harten Karton (dies ist nur um eine gute Sichtbarkeit des Grades zu erhalten) und fügen Sie den Arm dann wie in Bild 4 zum Servomotor hinzu.
Schritt 2:Laden Sie die ServoTimer2-Bibliothek herunter und fügen Sie sie zu Arduino hinzu
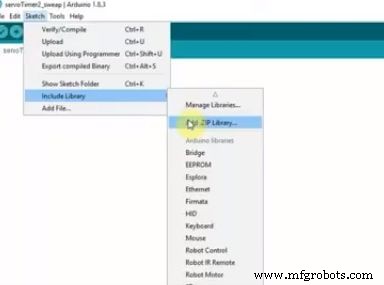
Zuerst müssen Sie die Bibliothek von hier https://github.com/nabontra/ServoTimer2 herunterladen und in den Arduino-Bibliotheksordner einfügen.
Gehen Sie dann zu Sketch>Bibliothek einschließen>zip.file aus dem Bibliotheksordner hinzufügen.
Jetzt können Sie loslegen.
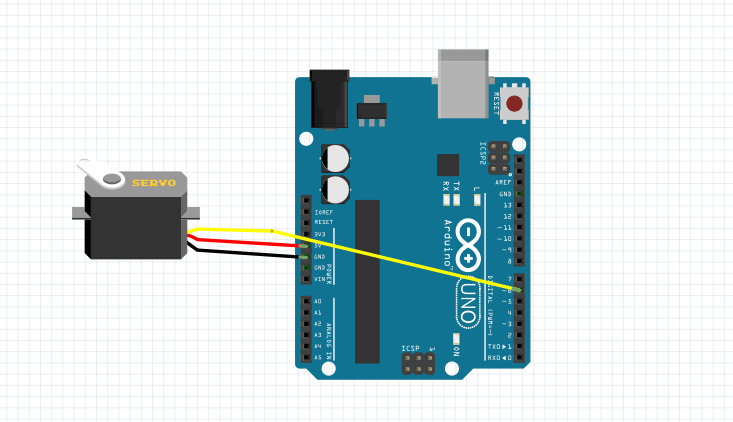
Schritt 3:Erstellen Sie die einfache Schaltung
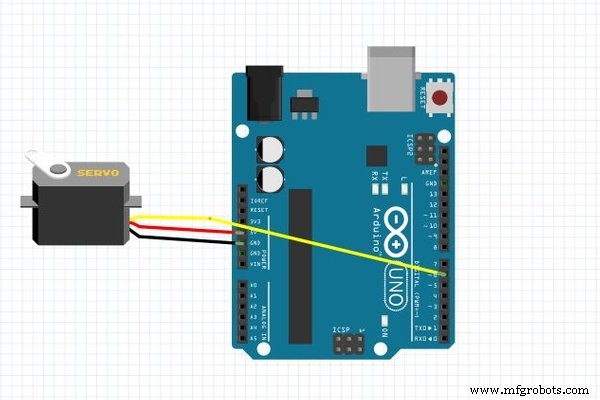

Dies ist der einfachste Teil
- Servo roter Draht zu Arduino vcc (5v)
- grau - Gnd
- Orange- digital 6
Schritt 4:Der Code.
Bevor wir den ServoTimer2-Code kennenlernen, werfen wir einen Blick zurück auf den Servo.h-Bibliotheks-Sweep.
(der Motor dreht von 0 Grad bis 90 Grad - 1 Sek. warten - dann auf 180 Grad - 1 Sek. warten)
#includeServo servo1;void setup() {servo1.attach(6); // Geben Sie Ihren Setup-Code hier ein, um ihn einmal auszuführen}void loop() { // Geben Sie Ihren Hauptcode hier ein, um ihn wiederholt auszuführen:servo1.write(0);delay(1000);servo1.write(90);delay( 1000);servo1.write(180);delay(1000);} Wie Sie in dieser Bibliothek sehen können, mussten wir nur den Grad schreiben, wenn wir einen Servo in eine bestimmte Position drehen möchten, und der Servo würde gut funktionieren. Aber in der ServoTimer2-Bibliothek müssen wir die Pulsbreite des Servos schreiben und das Servo bewegt sich damit zu dieser Position. Am häufigsten bedeutet 1500 90 Grad. Die maximale Pulsbreite beträgt 2250 und die minimale ist 750. Das würde bedeuten, dass 750 für 0 Grad und 2250 für 180 Grad steht. Aber lassen Sie mich Ihnen sagen, das ist von Servo zu Servo unterschiedlich. Senden Sie einfach Ihre Werte ein und sehen Sie, was passiert. Machen Sie sich keine Sorgen, dass Ihr Servomotor dadurch nicht zerstört oder beschädigt wird.
Jetzt werde ich den gleichen Code für ServoTimer 2 erstellen und so erhalten Sie die eigentlichen Unterschiede.
#include"ServoTimer2.h"ServoTimer2 servo1;void setup() {servo1.attach(6); }void loop () { // Geben Sie Ihren Hauptcode hier ein, um ihn wiederholt auszuführen:servo1.write (750); // min Impulsbreite für 0 Grad Verzögerung (1000); servo1.write (1500); // Impulsbreite für 90 Grad Verzögerung (1000); servo1.write (2250); // maximale Impulsbreite für etwa 180 Grad Verzögerung (1000);} Schalten Sie jetzt einfach das Arduino ein und sehen Sie mit einer Gradskala, für welchen Wert sich das Servo dreht. Und damit können Sie Ihr Projekt verwirklichen. Happy Making.o 2700, um es zu erledigen.
Schritt 5:Zuletzt das Arduino einschalten und experimentieren


Schalten Sie jetzt einfach das Arduino ein und sehen Sie mit einer Gradskala, für welchen Wert sich das Servo dreht. Und kaufen Sie dabei, damit Sie Ihr Projekt verwirklichen können. Viel Spaß beim Basteln.
Code
- Servo seep.code
- ServoTimer2.sweep.code
Servo seep.codeC/C++
#includeServo servo1;void setup() {servo1.attach(6); // Geben Sie Ihren Setup-Code hier ein, um ihn einmal auszuführen}void loop() { // Geben Sie Ihren Hauptcode hier ein, um ihn wiederholt auszuführen:servo1.write(0);delay(1000);servo1.write(90);delay( 1000);servo1.write(180);delay(1000);}
ServoTimer2.sweep.codeC/C++
#include"ServoTimer2.h"ServoTimer2 servo1;void setup() {servo1.attach(6); }void loop () { // Geben Sie Ihren Hauptcode hier ein, um ihn wiederholt auszuführen:servo1.write (750); // min Impulsbreite für 0 Grad Verzögerung (1000); servo1.write (1500); // Impulsbreite für 90 Grad Verzögerung (1000); servo1.write (2250); // maximale Impulsbreite für etwa 180 Grad Verzögerung (1000);} Schaltpläne
ServoTimer2.sweep.code
https://github.com/ashraf-minhaj/Arduino-ServoTimer2-basic-sweep-/tree/code-sweepHerstellungsprozess
- Wie verwenden wir Molybdän?
- So erstellen Sie eine Arduino+Raspberry Pi-Roboterplattform
- Einfacher Pi-Roboter
- Wie man Glasfaser herstellt
- realloc()-Funktion in der C-Bibliothek:Wie verwenden? Syntax &Beispiel
- free()-Funktion in der C-Bibliothek:Wie verwenden? Lernen Sie mit Beispiel
- Wie einfach ist es, einen Thermistor zu verwenden?!
- So erstellen Sie eine Cutaway-Animation in Solidworks
- So erstellen Sie einen Prototyp
- So verwenden Sie einen Cutter Grinder