


Schiebetor-Automatisierung
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Über dieses Projekt
Projektübersicht
In diesem Projekt nutze ich die Kraft von Arduino, um eine Schaltung zum Antreiben eines Schiebetors zu erstellen. Das Hauptziel dieses Projekts ist es, ein totes Schiebetor mit einem funktionierenden Wechselstrommotor zu verwenden und das System mit einem Arduino, ein paar Relais, einem 433-MHz-Empfänger, einem 433-MHz-Sender und einigen handwerklichen Fähigkeiten zu automatisieren. Das System erstellt eine Methode, um den Motor des Tors bei Bedarf anzutreiben und zu entscheiden, ob das Tor geöffnet oder geschlossen wird.
Der Arduino hört ständig auf eine eingestellte Antwort des Senders, in diesem Fall ist es die Fernbedienung, die zum Öffnen oder Schließen des Tors verwendet wird. Der Sender arbeitet auf zwei Kanälen, wobei jeder Kanal eine eindeutige ID hat. Sobald diese ID vom 433-MHz-Empfänger empfangen wurde, sendet er ein Signal an den Arduino, der die Relais steuert, um den Motor mit Strom zu versorgen.
Methodik
Schritt 1:Antreiben des Motors
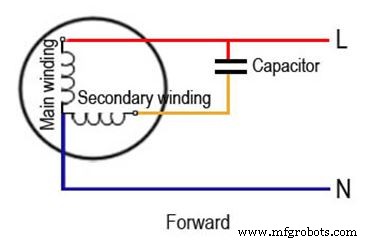
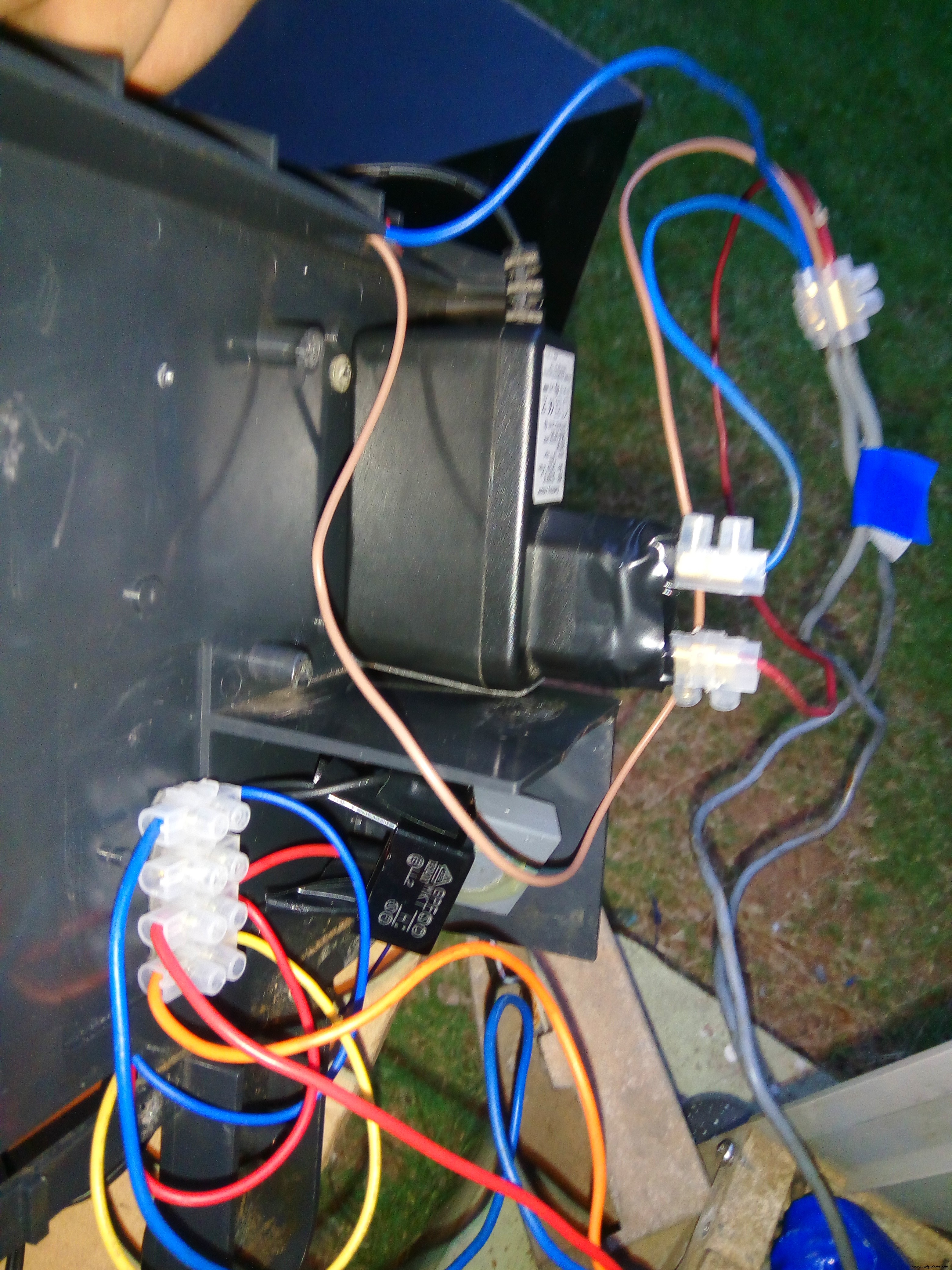
Die Konfiguration zum Antreiben des Motors ist unten dargestellt. Damit der Motor das Tor in Vorwärts-(Schließ-)Richtung bewegen kann, sollte die Hauptwicklung an die Hauptstromversorgung angeschlossen werden.
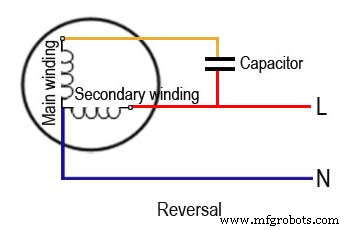
Damit sich der Motor in die entgegengesetzte (offene) Richtung bewegen kann, sollte die Sekundärwicklung an das Stromnetz angeschlossen werden.
Es ist notwendig zu erkennen, welcher Draht welcher Wicklung entspricht. Normalerweise sind die Drähte nicht beschriftet und dies kann durch Versuch und Irrtum festgestellt werden, indem das Kabel mit Wechselstrom versorgt wird.
In meinem Fall arbeitete ich mit einem 220~240VAC Motor. Ich konnte den Neutralleiter leicht identifizieren, da er blau war, was eine Standardfarbe ist, die verwendet wird, um den Neutralanschluss anzuzeigen.
Als nächstes verband ich das Live-Terminal mit dem roten Kabel, wodurch sich der Motor in Vorwärtsrichtung drehte. Dies deutet darauf hin, dass ich die Hauptwicklung mit Strom versorgt habe des Motors.
Hinweis: Stellen Sie sicher, dass der Starterkondensator richtig angeschlossen ist und funktioniert. Dadurch wird sichergestellt, dass der Motor ein ausreichendes Anlaufdrehmoment hat.
Schritt 2:Stoppen des Motors
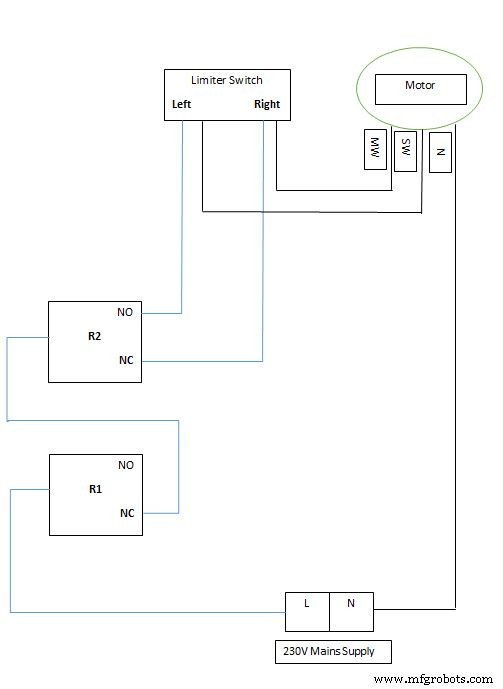
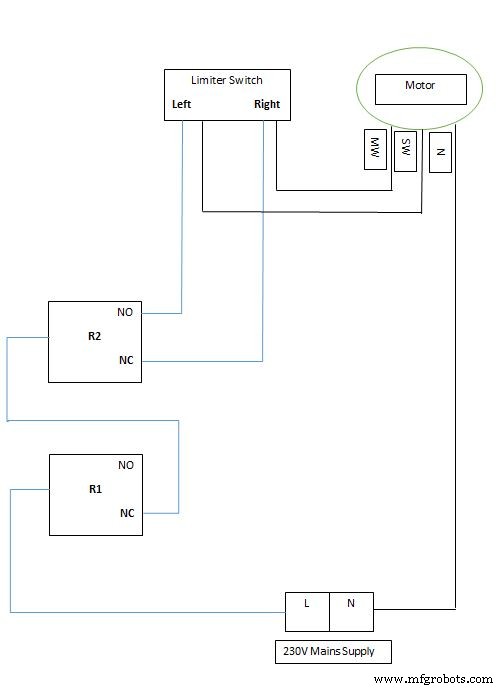
Der Motor wird über einen Begrenzungsschalter mit Netzstrom versorgt. Sobald das Tor ein Ende erreicht, wird der Begrenzerschalter ausgelöst, der den Stromkreis öffnet und die Stromversorgung des Motors unterbricht.
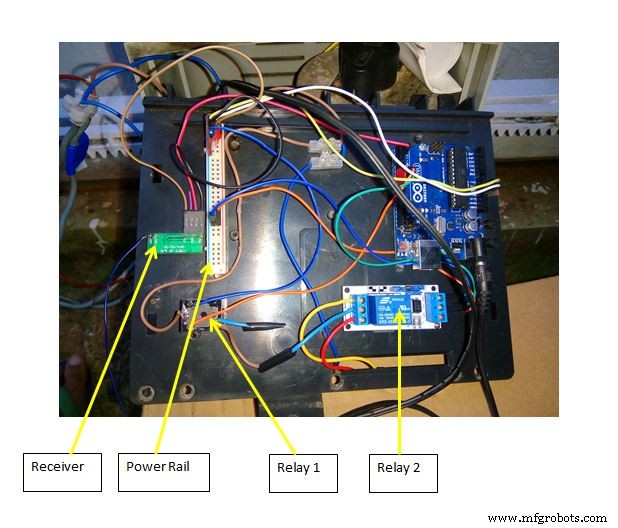
Schritt 3:Verwenden von Relais zur Steuerung des Motors
Das Relais hat zwei Kontaktpunkte; Normalerweise geöffnet und normalerweise geschlossen.
Der normalerweise geschlossene Pfad wird verwendet, um die Hauptwicklung des Motors zu versorgen. Dies wurde gewählt, um sicherzustellen, dass beim Zurücksetzen der Anlage oder bei einem Fehler in der Anlage der Motor dafür sorgt, dass das Tor jederzeit geschlossen bleibt.
Der normalerweise offene Pfad wird verwendet, um die Sekundärwicklung des Motors zu versorgen. Der normalerweise offene Pfad ist geschlossen, wenn die Spule im Relais erregt wird. Dies kann durch Senden eines 5V-Signals vom Arduino erfolgen, da die verwendeten Relais unter 5V arbeiten.
Durch die Verwendung von zwei Strompfaden stellt der Motor sicher, dass die Haupt- und Sekundärwicklungen des Motors nicht gleichzeitig mit Strom versorgt werden.
Dieses Relais(R2 ) wird über Pin 8 betrieben des Arduinos.
Ein zweites Relais(R1 ) wird verwendet, um den Stromkreis zu unterbrechen, damit der Motor stoppt, wenn der Arduino den Befehl vom Empfänger erhält, während sich das Tor bewegt.
Der Arduino überprüft den Empfänger ständig, ob er einen Befehl erhalten hat. Sobald ein Befehl ausgegeben wird, leitet der Arduino die Stromversorgung zum Motor um, damit er das Tor schließen oder öffnen kann.
Der Hauptzweck des zweiten Relais besteht darin, dem System genügend Zeit zu geben, das System umzuleiten, um den Motor mit Strom zu versorgen, ohne die Drehrichtung des Motors sofort zu ändern. Sobald die Umleitung abgeschlossen ist, schaltet das Relais ab und der Motor wird mit Strom versorgt, um sich in die entgegengesetzte Richtung zu drehen.
Dieses Relais wird über Pin 9 betrieben des Arduino.
Zweck des zweiten Relais
Wenn das System das Tor halb geschlossen hat und den Befehl vom Empfänger empfängt, das Tor zu öffnen, wird das Relais aktiviert, um die Energie zur Sekundärwicklung umzuleiten. Da dies fast augenblicklich geschieht, steht das Relais unter konstantem Druck durch die vom Motor erzeugte Sperrspannung aufgrund eines plötzlichen Stromausfalls an der Hauptwicklung. Außerdem werden die Kontakte des Relais bei dauerhafter Belastung dauerhaft beschädigt.
Mit Hilfe eines zusätzlichen Relais wird die Stromversorgung zum Motor unterbrochen und gibt dem System eine Zeit von 10 Sekunden, um den Strom auf die erforderlichen Wicklungen umzuleiten. Dies reduziert die Belastung der Kontakte des Relais und erhöht deren Lebensdauer.
Relaisschutzmethode:
Entstörkondensatoren
Wenn ein Gleichstrommotor plötzlich gestoppt wird, wird durch die Spule des Motors eine negative Stromschleife erzeugt, die auf die induktiven Eigenschaften einer Spule zurückzuführen ist. Dies kann jedoch neutralisiert werden, indem eine Rückkopplungsdiode installiert wird, um einen Weg für den negativen Strom zu schaffen.
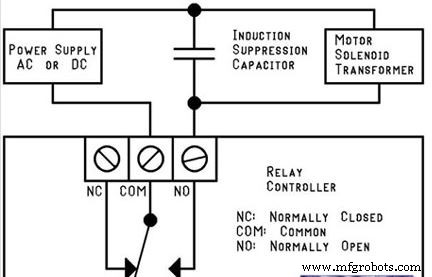
Wenn ein Wechselstrommotor plötzlich durch einen Schalter gestoppt wird, erzeugt dies einen Hochspannungsaufbau an den Schalterkontakten.
Entstörkondensatoren werden verwendet, um den Hochspannungsaufbau an den Relaiskontakten zu verhindern, wenn der Motor angewiesen wird, in die entgegengesetzte Richtung zu laufen. Dies schützt Relaiskontakte.

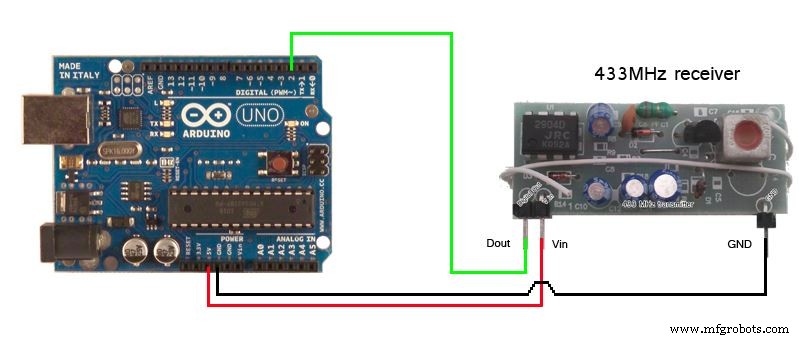
Schritt 4:So konfigurieren Sie den Empfänger
Der Empfänger arbeitet mit 433 MHz, das Programm von Arduino wird kontinuierlich durchlaufen, um den Signalanschluss des Empfängers zu überprüfen. Sobald das richtige Signal empfangen wird, aktiviert Arduino dann Relais 1 (R1), damit Relais 2 (R2) Strom an den Motor weiterleitet.
Wenn Daten vom Sender gesendet werden, werden sie vom Empfänger in Form einer ganzen Zahl empfangen. In meinem Fall konnte ich mit dem seriellen Monitor des Arduino den Wert sehen, den der Empfänger aufnehmen konnte.
Der Hauptgrund für die Verwendung einer höheren Funkfrequenz für die Kommunikation besteht darin, dass die Reichweite groß ist und das Signal vom Empfänger auch dann empfangen wird, wenn einige Hindernisse das Signal blockieren. Dies kann nur durch hochfrequente Funkwellen erreicht werden.
In meinem Projekt konnte ich einen Arbeitsradius von etwa 30 Fuß erreichen, damit das System aktiviert werden kann.
Hinweis: Der Funktionsradius des Systems kann um einige Meter erweitert werden, indem ein langes Kabel an die Antenne angelötet wird Port im Empfängermodul.

Demovideo
Endgültige Projekt-Schnappschüsse
Schaltpläne
Herstellungsprozess
- RASPBERRY PI HOME AUTOMATION
- Raspoulette-Prototyp
- Windkraft
- Leitfaden für Power Hammers
- Drehzentrum mit 75-PS-Spindelmotor mit hohem Drehmoment
- Industrie 4.0 in der Fertigung:Die wachsende Kraft der Automatisierung
- Was ist ein Linearmotor?
- Druckmaschinenautomatisierung verstehen
- Was ist ein Servomotor?
- Was ist ein Powerchuck?