


rDUINOScope
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 10 | |||
 |
| × | 1 | |||
| × | 1 |
Über dieses Projekt


Beschreibung
Die weltweit erste eigenständige Arduino-basierte Teleskopsteuerung Goto.
Alle verfügbaren Open-Source-Teleskopsteuerungen verwenden entweder den Raspberry Pi, der viel Strom verbraucht, oder verwenden Arduino als Erweiterung für einen Computer, ein Smartphone oder ein Tablet. rDUINOScope ist das erste Arduino-basierte, eigenständige Gerät, mit dem Amateurastronomen den Nachthimmel genießen können.
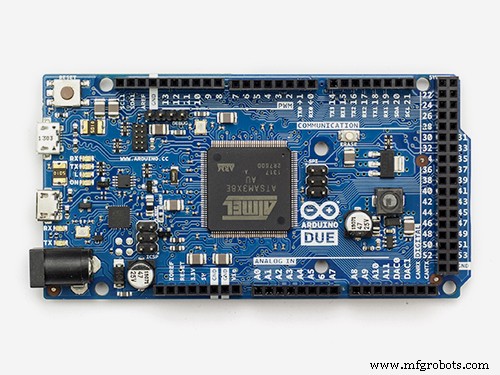
Die ursprüngliche Idee war, eine billige und einfach zu bauende Alternative zu kommerziell erhältlichen GOTO-Produkten zu schaffen, wie sie von SkyWatcher, Orion, Vixen und anderen hergestellt werden. Somit baut die Hardwarearchitektur auf einem Arduino DUE Board und auf dem Markt erhältlichen günstigen Sensoren auf. Anleitung zum Bauen und Benutzerhandbuch wurden auf der Projektwebsite erstellt. Das Herzstück des Systems ist ein Arduino DUE-Board, das mit Software ausgestattet ist, die ständig weiterentwickelt wird, um zusätzliche Funktionalität zu bieten.
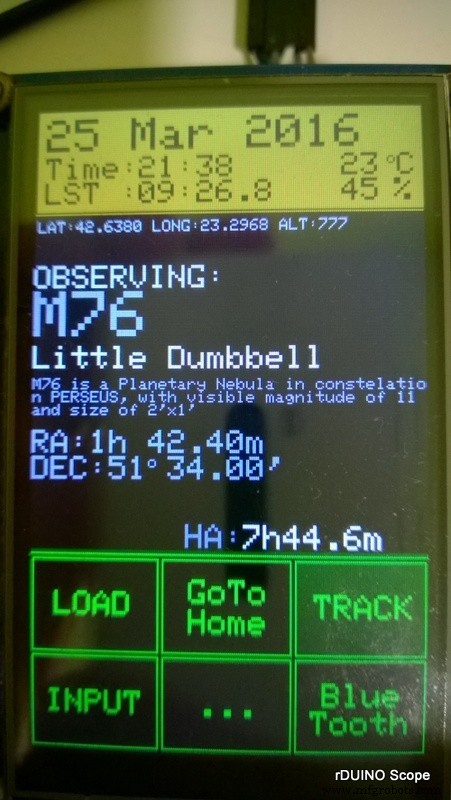
rDUINOScope mit Stellarium:
Einzelheiten
rDUINOScope ist ein Open Source, Arduino Due-based Telescope Control System (GOTO). Als eigenständiges System konzipiert, benötigt rDUINOScope weder einen PC, ein Tablet oder Mobiltelefon noch eine Internetverbindung, um zu funktionieren und atemberaubende Ansichten zu liefern!
Im Grunde hat es eine Datenbank mit DIE BESTEN 250 Sternenobjekte (Messier and Hidden Treasures Catalogues) und 200 Sternen , berechnet ihre Position am Himmel und richtet das Teleskop aus. Implementierte Ausrichtungsverfahren ermöglichen ein "Immer im Okular"-Erlebnis beim Schwenken zu ausgewählten Objekten und sobald sich das Objekt im Okular befindet, verfolgt das System es weiter.
Falls Sie jedoch Ihre elektronischen Geräte nutzen möchten, #rDUINOScope nutzt die Bluetooth-Kommunikation (drahtlose Einrichtung), um sich mit allen elektronischen Geräten zu verbinden und Befehle basierend auf dem MEADE LX200-Kommunikationsprotokoll zu akzeptieren.
Das System funktioniert mit Schrittmotoren aller Art und kann sowohl auf DIY-Montierungen als auch auf handelsüblichen Produkten wie SkyWatcher, MEADE, Orion, Vixen usw. montiert werden.
Funktionalität:
Was ist im rDUINO SCOPE enthalten?
rDUINOScope Github
Bauanleitung
SCHRITT 1 Vorbereitung
Bevor wir beginnen, ist es wichtig, dass Sie verstehen, wie die Software funktioniert, um Änderungen vornehmen und sie für Sie anpassen zu können. Schließlich ist dies eine der größten Stärken dieses Projekts!
Um diesen Teil zu verstehen, müssen Sie den Code aus den Projektdateien zusammen mit den "Bibliotheken"-Dateien herunterladen ... oder einfach das gesamte Paket herunterladen von: http://rduinoscope.co.nf/downloads.php . Alle referenzierten Zeilennummern entsprechen dem Code von V2.1. Boiana EQ
Sie sollten wissen, wie der Arduino-Code funktioniert. Normalerweise hat das Arduino-Programm 2 Abschnitte - SETUP (); und SCHLEIFE(); SETUP() wird am Anfang des Programms ausgeführt und verwendet grundsätzlich das System; LOOP() ist eine konstante Schleifenfunktion, die mehrmals pro Sekunde ausgelöst wird. Um sicherzustellen, dass wir Bildschirme, Berührungseingaben usw. haben und der Bildschirm nicht aufgrund der LOOP () flackert, müssen wir einen Mechanismus erfinden, der Arduino weiß, was der Benutzer von ihm erwartet. Daher sehen Sie im Abschnitt LOOP() einen sehr kleinen Teil des Codes, der nur "Berührung berücksichtigen.. oder Zeit berücksichtigen ..." usw. sagt. Der Rest der Aktivitäten erfolgt innerhalb dieser Funktionen, die es uns ermöglichen, die Ablauf des Programms, damit die Bildschirme nicht mehrmals pro Sekunde aktualisiert werden.
Berechnungen :Ich habe einige Informationen aus dem Internet verwendet, um die Position von stellaren Objekten zu berechnen. Die meisten Informationen habe ich über den folgenden Link gesammelt:http://www.stargazing.net/kepler/altaz.html - Beschreibt die erforderlichen Formeln und den Ansatz zur Berechnung des Stundenwinkels (HA), unter Kenntnis des Standorts, der aktuellen Zeit und des stellaren Objekts RA und DEZ.
Sobald ich den Code erstellt habe, um HA /row 678 zu berechnen:void computeLST_HA() / , ich habe diese Seite verwendet, um zu überprüfen, ob es in Ordnung ist:http://www.jgiesen.de/astro/astroJS/siderealClock/ , und später, als ich die DB mit Messier Objects hinzugefügt habe, habe ich Stellarium (http:// www.stellarium.org/) Antrag auf die gleichen Prüfungen.
Das Hauptproblem, das ich fand, waren nicht die Formeln selbst, sondern die Art und Weise, wie Arduino mit Variablentypen umgeht und insbesondere die Genauigkeit der Berechnungen.
Nachdem wir nun HA und DEC für ein bestimmtes Objekt berechnet haben, wollen wir die Montierung auf das Teleskop ausrichten und dazu müssen wir irgendwie wissen, wie viel genau die Motoren drehen müssen. Um dies zu erreichen, muss ich das Verhältnis von Schnecke zu Getriebe kennen – d. h. wie viele Umdrehungen die Schnecke machen muss, damit das Zahnrad 360° macht. Ich habe Vixen Super Polaris und eine schnelle Suche im Internet ergab, dass es ein 144-Zahnrad sowohl für RA- als auch für DEC-Wellen verwendet. Ich habe eine einfache Excel-Datei (*.XLS - http://rduinoscope.co.nf/downloads/Gears_Stepper_Calculation.xlsx) erstellt, um zu berechnen, wie viel sich die Motoren drehen sollten, sobald ich HA und DEC berechnet habe, und auch, wie oft sie "feuern" sollen " Motoren, um die Erdrotation zu kompensieren.
Gears_Stepper_Calculation.xlsxDas gleiche mathematische Modell, das ich im XLS verwendet habe, ist auch im Code implementiert, Sie müssen also einfach die Werte für Ihre Halterung am Anfang des Codes ersetzen (Zeilen 34 bis 37).
// HERE GOES THE Mount, Gears and Drive information.// ... verwendet, um das Verhältnis von HourAngle zu Mikroschritten zu berechnen // AKTUALISIEREN SIE DIESEN TEIL entsprechend Ihrem SET-UP// ------ ---------------------------------------// NB:RA und DEC verwenden das gleiche Getriebe Übersetzung (in meinem Fall 144 Zähne)! //------------------------------------------ --------int WORM =144;int REDUZTOR =4; // 1:4 Untersetzungint DRIVE_STP =200; // Schrittantrieb hat 200 Schritte pro Umdrehungint MICROSteps =16; // Ich werde den 1/16 Mikroschritt-Modus verwenden, um siderisch zu fahren - bestimmt auch die NIEDRIGSTE Geschwindigkeit. Nachdem wir nun die Verhältnisse berechnet haben, weiß der Code, wie weit die Motoren gedreht werden müssen, um das Teleskop auf die entsprechenden Koordinaten auszurichten, und auch, wie hoch die Taktfrequenz ist, damit die Montierung das Objekt verfolgen kann. Funktionen, die sich um das Obige kümmern, beginnen bei Zeile 906 und Zeile 917:
void Sidereal_rate(){}void cosiderSlewTo(){} Überlegungen :Wissen Sie, dies ist kein gebrauchsfertiges Produkt. Es ermöglicht Ihnen, es an Ihre Bedürfnisse anzupassen und ist daher sehr flexibel, aber mit der Flexibilität gehen einige Nachteile einher. Ich habe diesen Abschnitt "Überlegungen" eingefügt, um sicherzustellen, dass diese nicht von Ihrer To-Do-Liste gestrichen werden.
- Motoren montieren ist eine einfache Aufgabe, die sich jedoch auf die Funktionsweise Ihrer Berechnungen auswirkt. In meinem Szenario haben Vixen Super Polaris ihre Originalzahnräder auf der rechten Seite der Schneckenwelle. Ich fand diese Wellen jedoch kurz, um die Zahnräder durch Riemenscheiben zu ersetzen, und verlegte die Riemenscheiben daher auf die gegenüberliegende Seite der Welle (links). Dies führte dazu, dass der Motor tatsächlich rückwärts drehen musste, um die Teleskopposition zu erhöhen, und ich musste daher den von mir erstellten Originalcode überarbeiten. Sie sollten auf jeden Fall die Richtungen, in denen die Motoren drehen, revidieren, sonst werden die Schritte falsch gezählt, also die Position falsch. Lassen Sie mich Ihnen zeigen, was ich meine:Siehe Zeile 1028, wo ich den Motor auf STP_BACK befehle, aber in Zeile 1031 erhöhe ich den Zähler +=... (Alle referenzierten Zeilennummern entsprechen dem Code von V2.1. Boiana EQ ).
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite (RA_STP, HOCH); digitalWrite (RA_STP, LOW); RA_microSteps +=RA_mode_steps;}sonst{ digitalWrite(RA_DIR,STP_FWD); digitalWrite (RA_STP, HOCH); digitalWrite (RA_STP, LOW); RA_microSteps -=RA_mode_steps;} AKTION: Überarbeiten Sie die folgenden Teile des Codes:void Consider_Manual_Moveint xP, int yP ), void cosiderSlewTo() und Sidereal_rate() ungültig machen.
- Nord-VS. Süden Hemisphären:Der Code kehrt auch die VORWÄRTS-Bewegung um, je nachdem, auf welcher Hemisphäre Sie sich befinden. Dies geschieht in einem Teil des Codes, in dem ich mich um die Touch-Eingaben kümmere. Möglicherweise müssen Sie den Codeabschnitt überarbeiten.
- Getriebe auf DEC- und RA-Achse :Mein Code funktioniert unter der Annahme, dass sowohl die DEC- als auch die RA-Achse ein 144-Zahnrad verwenden. Dies ist bei Vixen Super Polaris der Fall. Falls Sie ein anderes Setup haben, müssen Sie möglicherweise einige Teile des Codes überarbeiten. Wenn Sie Probleme haben, diese Teile des Codes zu identifizieren, senden Sie mir eine Nachricht und ich werde versuchen, Ihnen zu helfen!
Planen Sie Ihre Aktivitäten: Jetzt haben wir einen Punkt erreicht, an dem wir unsere Aktivitäten planen müssen, um das rDUINO Scope GoTo-System tatsächlich aufzubauen. Grobe Schätzungen gehen davon aus, dass Sie das System in 2-3 Tagen fertigstellen können, wenn Sie alles Notwendige (HW, Werkzeuge und Materialien) haben. Ich habe ungefähr 4-5 Monate gebraucht, um es fertigzustellen, wenn man bedenkt, dass ich nur nachts (nicht jede Nacht) arbeiten konnte und auch viel recherchieren musste. Alles zusammenzufügen hat mich so gekostet:
- 1 Tag, um das Shield-Board zu bauen und das System zu aktualisieren
- 1 Tag, um alles in eine Kiste zu packen
- 1 Tag, um Motoren und Riemenscheiben an der Halterung zu befestigen
SCHRITT 2 Materialien
Da wir nun wissen, wie das Programm grundsätzlich funktioniert, müssen Sie Ihre Beschaffung planen und die benötigten Materialien beschaffen.
Stückliste :Die meisten Materialien, die ich verwendet habe, werden von chinesischen Lieferanten im Internet gekauft. Einige von ihnen habe ich jedoch hauptsächlich vor Ort gekauft, weil sie als gut zu haben galten und ich Verzögerungen vermeiden wollte:GPS, Bluetooth und Joystick. Es hat mich ungefähr 190 $ gekostet um all dies zu bekommen, so ist es wirklich ein niedriger Preis im Vergleich dazu, wie teuer es ist, ein solches System von den Herstellern zu kaufen. Auf der Projektwebsite finden Sie eine Liste der Materialien mit ihren Preisen und wo Sie sie kaufen können:http://rduinoscope.co.nf/rDUINO_step2.html, aber die Liste ist auch auf dieser Website im Abschnitt "KOMPONENTEN" verfügbar .
Wenn Sie sie billiger finden oder schneller liefern können, empfehle ich Ihnen dringend, dies zu tun.
Zusätzlich benötigen Sie je nach Design möglicherweise 40 Pins. Kabel mit Anschlüssen für den TFT, einige Kunststoffschrauben zum Befestigen des Joysticks, USB-Kabel, um sicherzustellen, dass das Arduino Due auch im Karton, Lüfter usw. programmierbar ist.
Wenn Sie diese nicht zu Hause haben (wie ich nicht), sollten Sie auch einige Lötmaterialien, Lötzinn, Zangen, Digitalmultimeter und andere kaufen.
Software, die Sie benötigen :Ein wichtiger Teil beim Aufbau Ihres rDUINOScope ist das Herunterladen und Installieren der Arduino IDE und aller dazugehörigen Software (Treiber, Boarddefinitionen und Bibliotheken). Folgen Sie der folgenden Liste, um die Installation auf Ihrem Computer erforderlich zu machen:
- Gehen Sie zur Arduino-Website und laden Sie die IDE herunter:https://www.arduino.cc/en/Main/Software. Installieren Sie die Software – Sobald die Software installiert ist, werden auch Treiber installiert, die benötigt werden, damit Ihr Computer das Arduino-Board erkennt, wenn es angeschlossen ist.
- Führen Sie die Arduino-IDE aus und navigieren Sie zu:Tools -> Vorstand -> Boards-Manager , dort angekommen Laden Sie die Arduino Due-Board-Definition „Arduino SAM Boards (32-bit ARM Cortex-M3)“ herunter und installieren Sie sie;
- Laden Sie das Bibliothekspaket herunter, das ich als Teil des Programms verwendet habe, und kopieren Sie es in den Ordner „Bibliotheken“ Ihrer Arduino IDE-Installation. (HINWEIS:"Bibliotheken" ist ein Ordner auf Ihrem Computer, aber es ist auch ein Ordner innerhalb des KOMPLETTEN PACKS, das auf der Projekt-Website verfügbar ist: http://rduinoscope.co.nf/downloads.php , Sie müssen also das Paket herunterladen, die Erweiterung in .ZIP umbenennen, es öffnen und den Inhalt des Ordners "_libraries" aus dem ZIP in den Ordner "libraries" auf Ihrem Computer kopieren.)
- Starten Sie die IDE neu und öffnen Sie die Hauptprogrammdatei - „_02_Boiana_EQ.ino“. Sie werden feststellen, dass 4 weitere Dateien in separaten TABs geöffnet werden. Dies sind unterstützende Dateien, die sich um verschiedene Teile der Software kümmern.
Sie sollten jetzt in der Lage sein, den Code zu kompilieren und auf das Arduino Due-Board zu laden, nachdem Sie Arduino an Ihren Computer angeschlossen haben.
Hinweis: Falls Sie nicht wissen, wie die Arduino-IDE funktioniert und was getan werden muss, um Arduino zu programmieren, lesen Sie die Website und die Tutorials:https://www.arduino.cc/en/Tutorial/HomePage
SCHRITT 3 Zusammenbau
Für detailliertere Anweisungen besuchen Sie bitte die Projekt-Website:http://rduinoscope.co.nf/rDUINO_step3.html
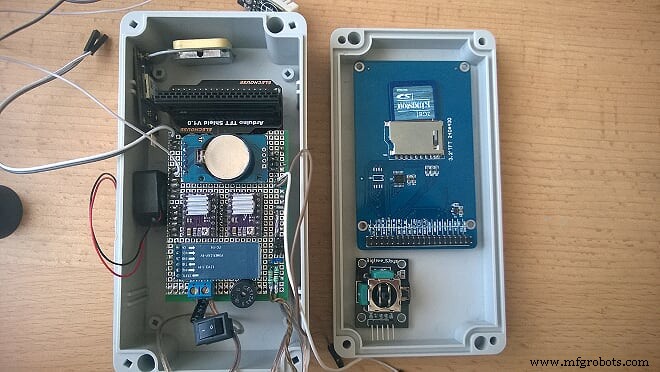
Jetzt ist es an der Zeit, das Shield-Board zu erstellen. Eine Shield-Platine ist eine Platine mit Pinbelegungen, die Sie auf die ArduinoDUE-Platine stapeln. Einige der Komponenten müssen sich auf dieser Platine befinden und andere sind stattdessen besser auf der Gehäusebox positioniert. Meine Aufteilung geht so:
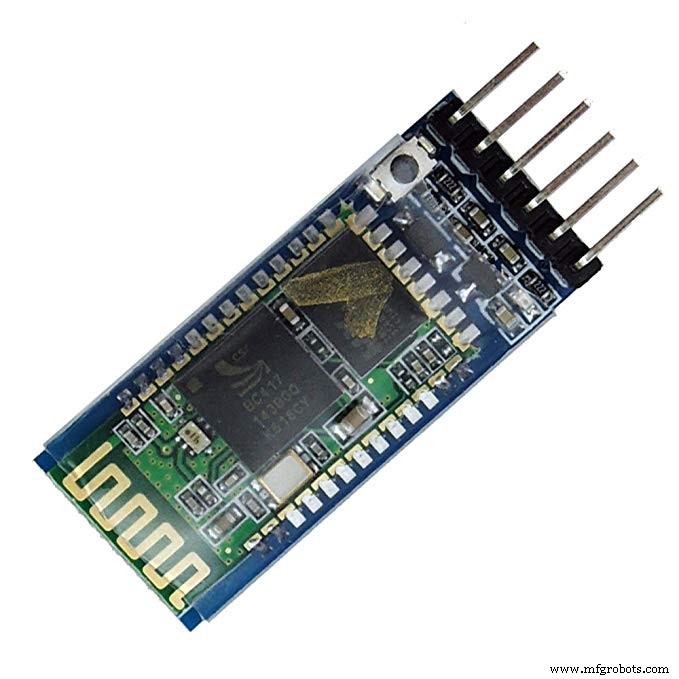
- Shield Board-Halterung:beide DRV8825-Laufwerke, RTC3231-Uhr, Bluetooth-Modul HC-05, Piezo-Speker, Anschluss für 12V und Pinbelegung für die restlichen Komponenten;
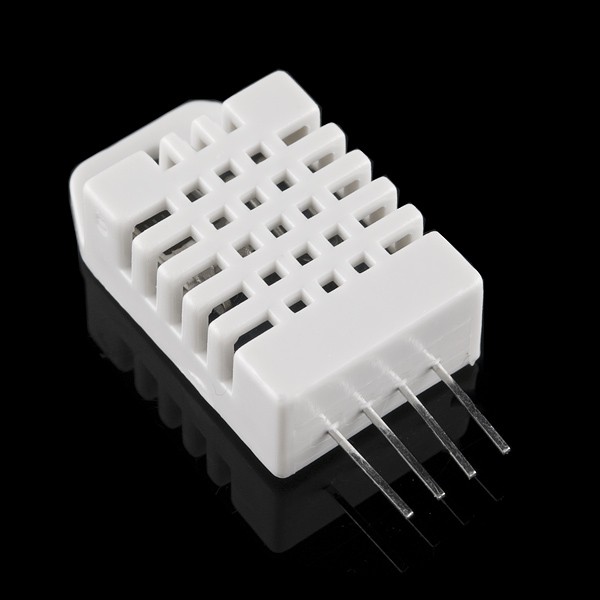
- Monatiert auf den Boxkomponenten sind:GPS-Modul NEO 6M - RX damit die Antenne immer in Richtung Himmel zeigen kann, DHT22 Temperatursensor durch ein Loch außerhalb der Box geklebt, PS2 Joystick, der TFT Screen und alle Schalter (ON /OFF-Schalter und Tag/Nacht-Modus-Schalter). Außerdem habe ich Löcher für die Motorantriebsanschlüsse, den 12-V-Stromversorgungsanschluss und einen USB-Kabelanschluss gebohrt, der zum ArduinoDUE Native-Anschluss führt, um Software-Updates zu ermöglichen, ohne die Box zu öffnen.
So verbinden Sie Komponenten mit dem ARDUINO DUE-Board:
Komponente .... Hardware-Pin .... Arduino-Pin
GPS
- GPS NEO 6M .... RX .... 16
- GPS NEO 6M .... TX .... 17
RTC
- RTC DS3231 .... SDA .... A4
- RTC DS3231 .... SCL .... A5
Bluetooth
- BT HC-05 .... TXD .... 14
- BT HC-05 .... RXD .... 15
DHT
- DHT22 .... aus .... 3
Sprecher
- Piezo-Lautsprecher .... 2
PS2
- PS2-Joystick .... VRx .... A1
- PS2-Joystick .... VRy .... A0
Deklination DRV8825
- DEZ DRV8825 .... SCHRITT .... 6
- DEZ DRV8825 .... DIR .... 7
- DEZ DRV8825 .... M0 .... 10
- DEZ DRV8825 .... M1 .... 9
- DEZ DRV8825 .... M2 .... 8
- DEZ DRV8825 .... ZURÜCKSETZEN DEZ DRV8825 .... SCHLAFEN
Rechtsaufstieg DRV8825
- RA DRV8825 .... SCHRITT .... 4
- RA DRV8825 .... DIR .... 5
- 3V
- RA DRV8825 .... M0 .... 11
- RA DRV8825 .... M1 .... 13
- RA DRV8825 .... M2 .... 12
- RA DRV8825 .... RA DRV8825 ZURÜCKSETZEN .... SCHLAFEN
TFT-Bildschirm
- Verwendung mit TFT Shield .... Pins (22-53) + SPI
- Tag/Nacht .... Modusschalter .... A3
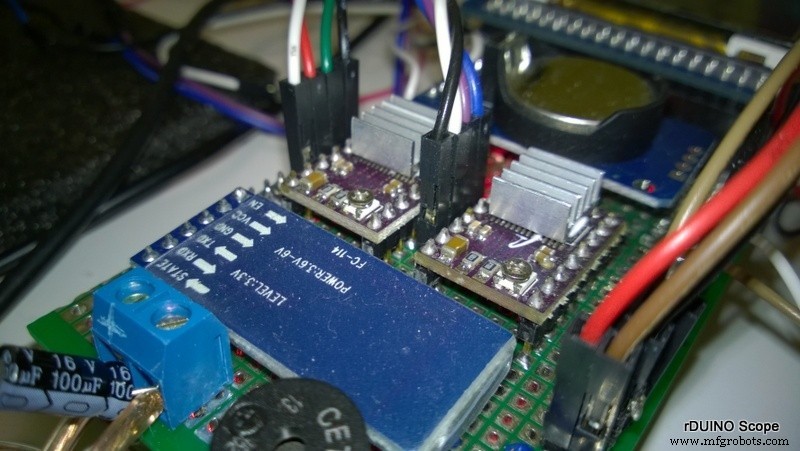
Richtig... Jetzt können wir das Schildbrett zusammenbauen. Besorgen Sie sich eine Prototyping-Platine und beurteilen Sie, wie Sie sie schneiden müssen, damit sie alle Komponenten aufnehmen kann, um etwas Platz für die Verdrahtung zu haben, und die Pinbelegungen so gelötet werden, dass sie auf Arduino gestapelt werden können. Bitte beachten Sie, dass Sie alle von Arduino verwendeten Pins verlöten und entweder mit den Komponenten auf der Shield-Platine oder mit einem Stecker auf dieser Shield-Platine verbinden müssen, damit auch Komponenten, die auf der Box selbst angebracht sind, angeschlossen werden können.
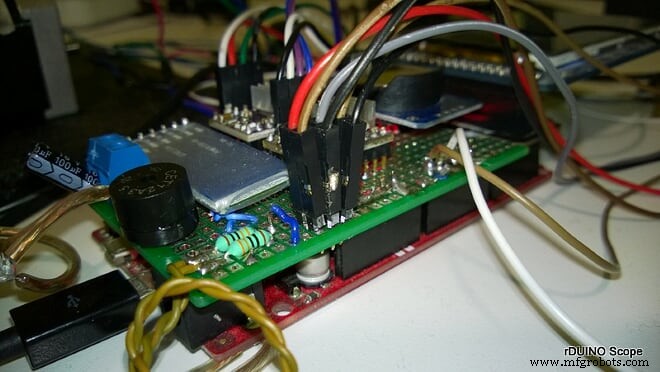
Ich füge unten einige Fotos des Prozesses hinzu:
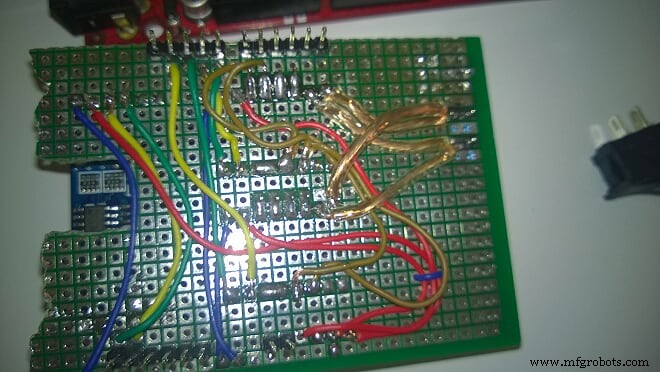

Als das erledigt war, habe ich die Platine angeschlossen und die Abschirmung getestet! Es hat nicht funktioniert! :( Ich habe die Verkabelung überprüft und es stellte sich heraus, dass ich eine Brücke zwischen 2 Anschlüssen erstellt habe und diese reparieren musste. Bitte beachten Sie, dass ich von diesem Moment an angefangen habe, jedes Löten auf Probleme zu überprüfen, da ich wirklich das Glück hatte, mein Arduino oder etwas anderes mit der falschen Verkabelung nicht zu verbrennen. NB:Stellen Sie sicher, dass Sie alle Verbindungen überprüfen! Stellen Sie sicher, dass Sie den folgenden Schaltplan für den DRV8825 und die Motorantriebe befolgen, da er wichtig ist.
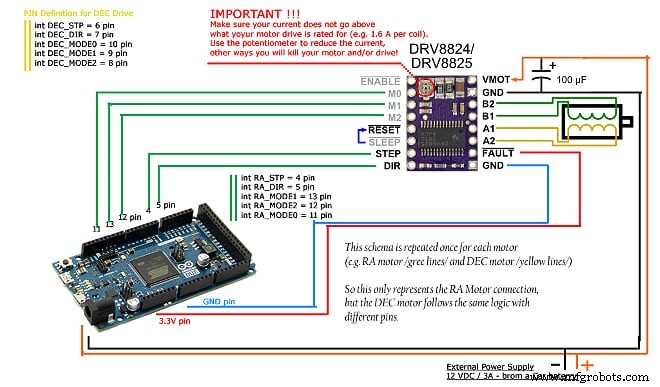
Stellen Sie sicher, dass Sie ein geeignetes Netzteil (12V, 1,6A) verwenden und die Motorantriebe anschließen, bevor das Gerät eingeschaltet wird! NB:Schließen Sie niemals Motorantriebe an, wenn der DRV8825 unter Last steht, da dies die Treiber verbrennen könnte!
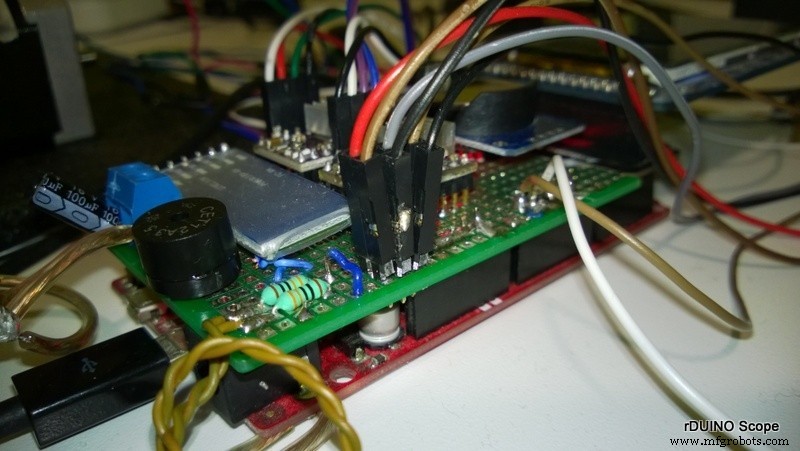
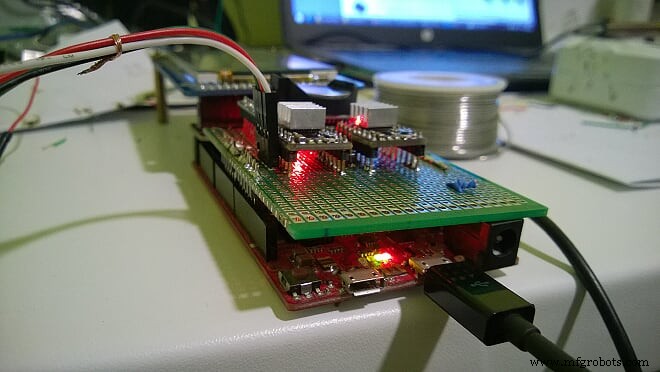
Da nun alle Komponenten verlötet sind, schlage ich vor, dass Sie auch die Motorantriebe anschließen, die Software auf das Arduino-Board laden und das gesamte Setup testen. Es sollte zu diesem Zeitpunkt ohne Störungen funktionieren.
Sie sollten nun in der Lage sein, mit der Software herumzuspielen und die Benutzeroberfläche kennenzulernen. Um bei der Benutzeroberfläche zu helfen, habe ich auf der Website des Projekts eine Seite mit dem BENUTZERHANDBUCH erstellt:http://rduinoscope.co.nf/guide.html
Ihr Setup sollte ungefähr so aussehen:

SCHRITT 4 Zusammenpacken
Sobald das Schildbrett fertig ist, nehmen Sie die Schachtel und beginnen Sie, alle verbleibenden Komponenten auszulegen und zu planen, wo Sie Löcher bohren müssen und welche Form und Größe Sie haben. Löcher schneidet man am besten mit einem kleinen Taschenmesser (zumindest für mich). Dabei spielt es keine Rolle, ob es sich um ein rundes oder ein eckiges Loch handelt. Sie können es leicht mit einem kleinen scharfen Messer schnitzen.
Die einzige Ausnahme ist für den Bildschirm, wo Sie wirklich ein langes, gleichmäßiges und quadratisches Loch benötigen. Ich habe um Hilfe gebeten und mein Vater hat es mit seinen Schneidemaschinen gemacht.
Sobald Sie mit dem Layout zufrieden sind und es für machbar halten, beginnen Sie mit dem Schneiden der Löcher. Es ist ein langer Prozess und verursacht einiges Durcheinander, sollte aber nicht länger als 2-3 Stunden dauern. Manchmal habe ich Bohrer verwendet, wenn ich kreisförmige Löcher machen musste, zum Beispiel:12-V-Stromversorgungsstecker, RA- und DEC-Motorstecker.
Bereiten Sie Ihre Heißklebepistole vor und beginnen Sie mit dem Heißkleben der Komponenten wie unten gezeigt:




Jetzt ist alles angeschlossen und verpackt, bis auf die Komponente auf der Vorderseite der Box. Ich habe mich entschieden, dort den TFT-Bildschirm, den PS2-Joystick und den Tag/Nacht-Modus-Schalter zu platzieren. Als ich zum TFT-Bildschirm kam, habe ich eine einfache Flachbandkabelverbindung mit Stecker und Buchse erstellt und an den Bildschirm gehängt. Dies hat jedoch nicht funktioniert! Der Grund ist, dass die Pins gespiegelt wurden und somit der TFT-Bildschirm nicht mehr funktionieren kann. Daher beschloss ich, einige komplizierte 2D-zu-3D-Konvertierungen durchzuführen und die Anschlüsse, die ich mit dem Flachbandkabel hatte, auszuarbeiten, um das Problem zu lösen
Lange Geschichte, kurz: Es ist kein Hexenwerk, aber es hat mir einige harte Zeiten bereitet, bis ich eine Lösung gefunden habe. Eine hässliche Lösung, aber es funktionierte und es funktionierte noch ein Jahr später. Unten seht ihr was ich meine.
Im Wesentlichen sehen Sie hier:
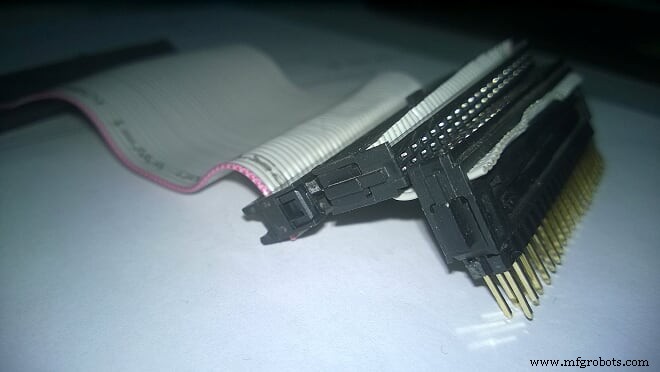

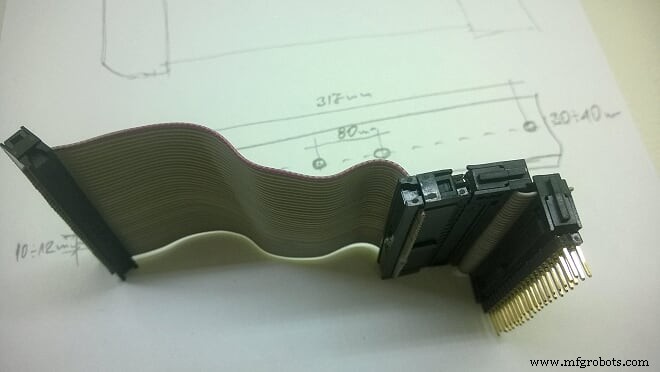
- Bandkabel
- 40-polige Buchsen
- Pins zum Löten auf einer Leiterplatte, die zu einem Array (2 x 20 Pins) geschnitten werden
Es funktionierte wie ein Zauber und erlaubte mir, die Box zu vervollständigen!






SCHRITT 5 Die deutsche äquatoriale Montierung
So sehr ich Ihnen jetzt mitteilen möchte, wie Sie die Motorantriebe an Ihre Halterung anschließen, kann ich nicht. Die Wahrheit ist, dass jeder Hersteller sein eigenes Design entwickelt und es daher keine Lösung gibt, die für alle funktioniert.
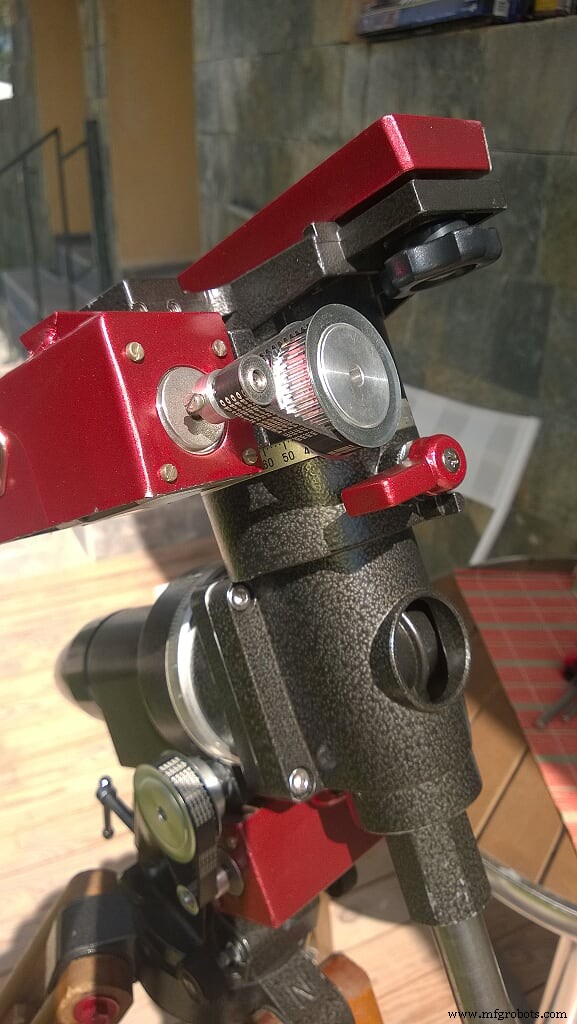
Ich verwende Vixen Super Polaris aus den 80er Jahren und die folgende Methode funktioniert dafür. Ich muss Sie daran erinnern, dass die Entscheidungen, die Sie in SCHRITT 1 getroffen haben, wo Sie die Werte im Code ändern mussten, wirkt sich jetzt auf unsere Arbeit aus. Unten sehen Sie mein Setup von Riemenscheiben und Riemen.
Ich habe 2 Sets für mein Setup gekauft. Ich war mir nur nicht sicher wie das geht und habe mir deshalb ein Set mit Untersetzung 1:4 und ein Set mit Untersetzung 1:3 gekauft. Auch die Größe des Riemens sollte unterschiedlich sein, da sich die Reduzierung auf den Abstand zwischen den beiden Riemenscheiben auswirkt. Ich gebe zu, dass man mit guter Planung und Design im Voraus entscheiden kann, wie man vorgeht und etwas Geld spart, aber ich hatte es eilig. Ich musste es zum Laufen bringen!

Nachdem ich die Riemen, Riemenscheiben und die Halterung vor mir hatte, entschied ich, dass der beste Ansatz für mich eine 1:4-Untersetzung wäre, da alles perfekt auf die Halterung zu passen schien und ich begann, am Motorgehäuse zu arbeiten. Nach einem halben Tag konnte ich mir das einfallen lassen:
Ich habe das gesamte Setup getestet und musste einige Änderungen an der Software vornehmen (die Variablenwerte in Zeile 35 auf 4 aktualisieren), damit es meine endgültige Designentscheidung darstellt. Habe es noch einmal getestet und alles funktionierte wie ein Zauber.


Ich musste auf eine gute Sternennacht warten, um es richtig zu testen, aber bis ich gewartet habe, habe ich gemerkt, dass etwas nicht stimmt!
Ich hatte das beste Telescope Control GOTO-System, viel besser als das, was ich mit meinem Hobby-Budget kaufen kann, aber es sah nicht richtig aus. Es brauchte noch einige letzte Schliffe, was mich später stolz auf mein rDUINOScope machte!
Endlich sieht mein rDUINOScope Vixen SP Ferrari so aus, wie es meiner Meinung nach aussehen sollte!


Dateien
_READ_ME.txt:Beschreibung der endgültigen Version v.2.1 Boiana EQ zusammen mit einigen FAQ.
_READ_ME.txt_02_Boiana_EQ.ino:Arduino-Hauptdatei
_02_Boiana_EQ.inographic_screens.ino:GRAFIKDATEI - mit der Hauptdatei verknüpft
graphic_screens.inotouch_inputs.ino:TOUCH INPUTS FILE - mit der Hauptdatei verknüpft
touch_inputs.inoBT.ino:BLUETOOTH-KOMMUNIKATION - mit der Hauptdatei verknüpft
BT.inoregular_updates.ino:TIME UPDATES - verlinkt mit der Hauptdatei
regular_updates.ino
Code
- Code-Snippet Nr. 1
- Code-Snippet #3
Code-Snippet Nr. 1Nur-Text
// HERE GOES THE Mount, Gears and Drive Information.// ... verwendet, um das Verhältnis von HourAngle zu Mikroschritten zu berechnen // AKTUALISIEREN SIE DIESEN TEIL entsprechend Ihrem SET-UP// --------- ------------------------------------ // NB:RA und DEC verwenden das gleiche Übersetzungsverhältnis (144 Zahn in meinem Fall)! //-------------------------------------------------------- ----int WORM =144;int REDUZTOR =4; // 1:4 Untersetzungint DRIVE_STP =200; // Schrittantrieb hat 200 Schritte pro Umdrehungint MICROSteps =16; // Ich werde den 1/16 Mikroschritt-Modus verwenden, um siderisch zu fahren - bestimmt auch die NIEDRIGSTE Geschwindigkeit.
Code-Snippet #3C/C++
if (SLEW_RA_microsteps> RA_microSteps){ digitalWrite(RA_DIR,STP_BACK); digitalWrite (RA_STP, HOCH); digitalWrite (RA_STP, LOW); RA_microSteps +=RA_mode_steps;}sonst{ digitalWrite(RA_DIR,STP_FWD); digitalWrite (RA_STP, HOCH); digitalWrite (RA_STP, LOW); RA_microSteps -=RA_mode_steps;} Github
https://github.com/dEskoG/rDUINOScopehttps://github.com/dEskoG/rDUINOScopeSchaltpläne
So verdrahten Sie Schrittmotoren und DRV8825 und verbinden sie mit Arduino DUE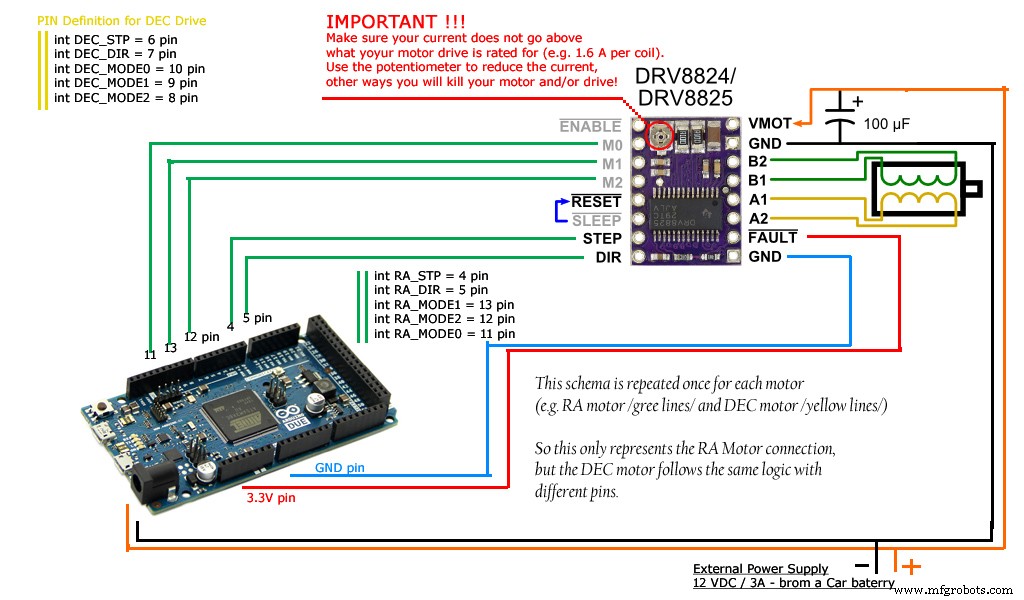 So verkabeln Sie alle Sensoren und verbinden sie mit Arduino DUE
So verkabeln Sie alle Sensoren und verbinden sie mit Arduino DUE 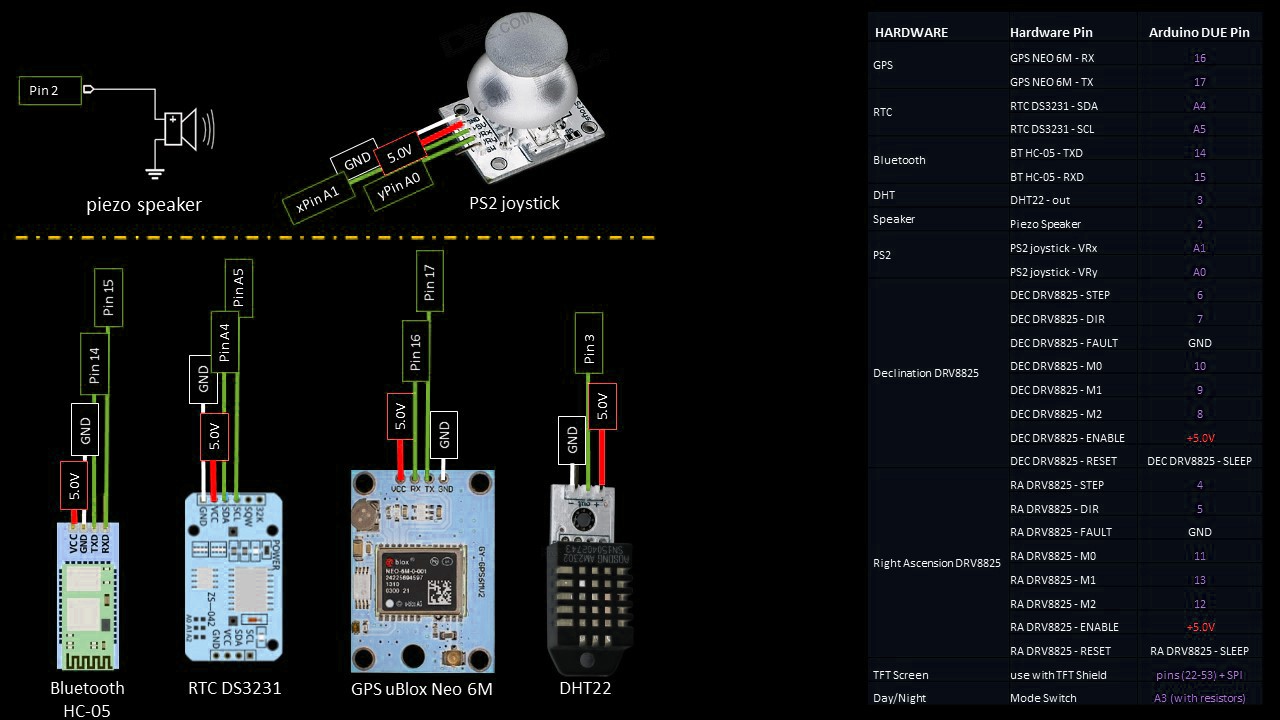
Herstellungsprozess