


Vergleich von Auto-Adressierungsschemata für den Autozugang
Autozugangssysteme, die Bluetooth Low Energy verwenden, haben typischerweise ein Zentralmodul und mehrere Satellitenmodule/Knoten, die entweder über einen CAN-Bus (Controller Area Network) oder LIN-Busse (Local Interconnect Network) kommunizieren. Die Satellitenmodule sind physisch um das Auto herum verteilt, um die Bluetooth-Kommunikationsreichweite zu verbessern.
Systementwickler möchten die Herstellbarkeit von Satellitenmodulen verbessern, indem sie eine Leiterplatte mit identischer Software entwerfen, sodass die Installation im Auto unabhängig von der Position des Bluetooth-Knotens ist. Da jedoch die Hardware und Software jedes Satellitenknotens zum Zeitpunkt der Installation identisch ist, ist ein Schema erforderlich, damit das Zentralmodul jedem Satellitenknoten eine eindeutige CAN- oder LIN-Adresse zuweisen kann, nachdem die Module im Fahrzeug installiert wurden.
Eine Möglichkeit besteht darin, ein dediziertes LIN-Daisy-Chain-Netzwerk zu verwenden, um CAN-IDs während der Herstellung an die Module weiterzugeben. In diesem Szenario verwendet das Zentralmodul die LIN-Schnittstelle zur Adressierung jedes Satellitenmoduls, die LIN-Schnittstelle wird jedoch ein Fahrzeugleben lang nicht mehr verwendet. Eine andere Option ersetzt den dedizierten LIN-Bus durch eine diskrete Implementierung, die die Stücklistenkosten (BOM) reduziert. Um die Systemkosten weiter zu senken, nutzt eine echte drahtlose Option, die nur Bluetooth verwendet, und keine zusätzliche Hardware, die bereits auf den Knoten vorhandene Bluetooth-Infrastruktur um, um die Module zu adressieren.
Letztendlich reduziert die drahtlose Methode die Stückliste, die Systemverkabelung und die Kosten für die Bevorratung, Verwaltung und Montage der jetzt unnötigen Komponenten. Dieser Artikel bietet einen Überblick über kabelgebundene automatische Adressierungsmethoden, bevor wir uns eingehender mit der kabellosen Methode befassen.
Autozugangssysteme für Kraftfahrzeuge tendieren dazu, Bluetooth Low Energy für Telefon-als-Schlüssel- oder andere digitale Schlüsselfunktionen zu verwenden. Diese Systeme funktionieren ähnlich wie Passiv-Entry-Passiv-Start-Systeme, bieten jedoch die Möglichkeit, das Smartphone des Fahrers als Schlüssel zu verwenden, und ersetzen so herkömmliche Schlüsselanhänger. Phone-as-a-Key-kompatible Fahrzeuge implementieren ein Zentralmodul oder Smart-Key-Modul und mehrere Satellitenmodule, die jeweils ein Bluetooth-Signal von einem Smartphone oder Schlüsselanhänger empfangen können. Ein typisches System kann neben dem Zentralmodul (Abbildung 1) zwischen sechs und zwölf Satellitenmodule haben.
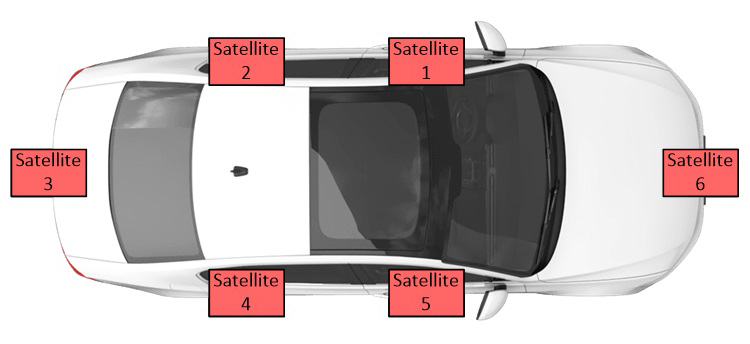
Abbildung 1. Dieses Diagramm zeigt, wo Bluetooth-Satellitenmodule im Auto verteilt werden könnten.
Verbraucher benötigen das Telefon-als-Schlüssel-System, um feststellen zu können, wann sich das Telefon oder der Schlüsselanhänger im Entriegelungsbereich des Fahrzeugs befindet. Um die Position des Smartphones oder Schlüsselanhängers zu ungefähren, trianguliert das System die von verschiedenen Satellitenmodulen empfangenen Signale, die im gesamten Fahrzeug an Orten wie der Beifahrertür, dem Schweller, dem Kofferraum oder den Stoßfängern verteilt werden.
Das Zentralmodul des Fahrzeugs kommuniziert mit den Satellitenmodulen über eine Kommunikationsschnittstelle wie CAN-Bus oder LIN-Bus. Das Zentralmodul verwendet die von jedem Satellitenmodul empfangenen Daten, um den Standort des Smartphones oder Schlüsselanhängers zu triangulieren und entscheidet dann, ob der Zugang zum Auto gewährt wird. Abbildung 2 zeigt, wie ein CAN-Bus als Hauptkommunikationsnetzwerk zwischen den Zentral- und Satellitenmodulen verwendet werden kann.
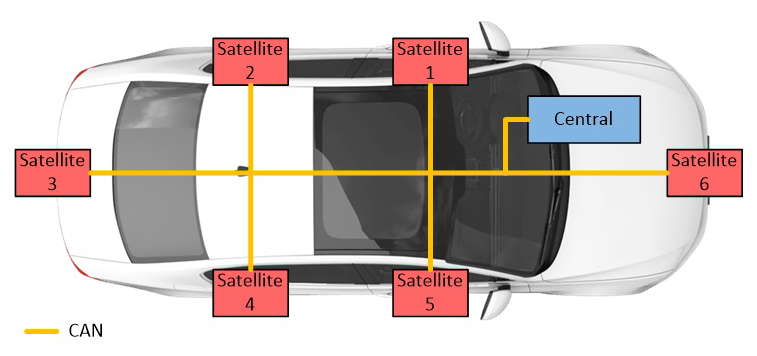
Abbildung 2. Ein CAN-Bus kann als Hauptkommunikationsnetzwerk zwischen den Zentral- und Satellitenmodulen in einem Bluetooth-Autozugangssystemnetzwerk angenommen werden.
Anhand der CAN-Bus-Adresse der Satellitenmodule kann das Zentralmodul feststellen, von welchem Satellitenmodul es Daten empfängt. Das Zentralmodul ordnet die eindeutige CAN-ID oder Adresse dem Standort jedes spezifischen Satellitenmoduls zu, der durch das Gesamtsystemdesign bestimmt wird. Anstatt für jedes Satellitenmodul eine eigene Leiterplatte zu haben, bei der die Busadresse fest verdrahtet oder festcodiert ist, wäre es vorteilhaft, ein einzelnes PCB-Design zu haben, auf dem eine einzige Firmware-Version für alle Satellitenmodule ausgeführt wird. Dies vermeidet die zusätzlichen Kosten- und Logistikprobleme, die mit der Herstellung und dem Bestandsmanagement von sechs, acht oder mehr nahezu identischen Einheiten verbunden sind. Ein einziges Design vereinfacht auch die Herstellung, indem es die Installation desselben Satellitenmoduls überall im Fahrzeug ermöglicht.
Da die Hardware und Software der Satellitenknoten alle identisch und zum Zeitpunkt der Installation nicht adressiert sind, ist ein Schema erforderlich, das es dem Zentralmodul ermöglicht, jedem Satellitenmodul nach der Installation im Auto eine eindeutige CAN-ID oder Adresse zuzuweisen.
Verdrahtete automatische Adressierung:LIN-Daisy-Chain-Methode
Die Zuweisung von CAN-Bus-Adressen an Satellitenmodule in Automobilen erfolgt derzeit über ein separates Kommunikationsnetzwerk (zB LIN) mit verketteten Satelliten auf dem Bus (Abbildung 3). Das Zentralmodul sendet über den LIN-Bus eine CAN-Bus-Netzwerkadresse an den ersten Satellitenknoten. Nach Abschluss sendet der erste Satellitenknoten die nächste vom Zentralmodul empfangene Adresse über den LIN-Bus an den zweiten Satelliten. Dieser Vorgang wird fortgesetzt, bis alle Satelliten ihre eindeutigen CAN-Adressen erhalten haben.
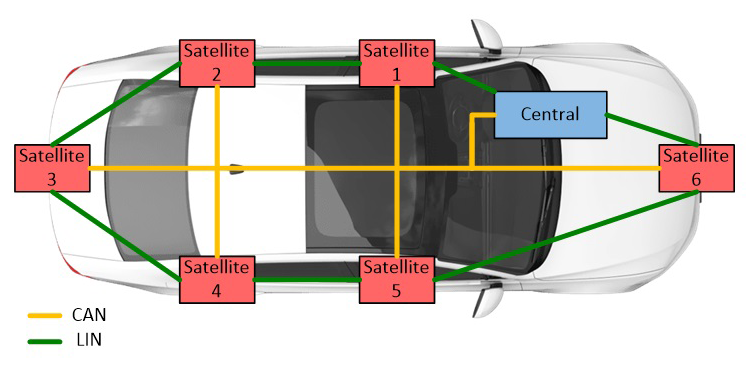
Abbildung 3. Diese Architektur mit automatischer Adressierung verwendet eine LIN-Daisy-Chain zum Senden der eindeutigen CAN-IDs an die Satelliten.
Dieses Schema erfordert zwei LIN Physical Layers (PHYs) pro Modul, eine zum Empfangen von Daten und eine andere zum Senden von Daten. Die LIN-PHYs werden nur während des automatischen Adressierungsvorgangs verwendet. Sobald die Satelliten programmiert sind, erfolgt die gesamte Standard-Datenkommunikation über den CAN-Bus des Autozugangs. Ein typisches Auto kann sechs bis 12 Satellitenmodule haben, was bedeutet, dass es zwischen 14 und 26 LIN-PHYs benötigt, um den einmaligen automatischen Adressierungsvorgang zu unterstützen, was die PCB-BOM des Fahrzeugs, die Systemkosten und die Komplexität erheblich erhöht.
Auto-Adressierung per Kabel:Single-Wire-Methode
Texas Instruments hat eine alternative Methode entwickelt, um die Stücklistenkosten jedes Moduls zu senken, indem die dedizierten LIN-PHYs mit automatischer Adressierung durch einen MOSFET und einige Widerstände ersetzt werden. Der Hauptunterschied in der automatischen Adressierungssoftware dieses Schemas besteht darin, dass alle Satellitenmodule für das Bluetooth-Chipsystem (SoC) so programmiert sind, dass sie den CAN-Bus ignorieren, bis ein Wecksignal auf der P_IN-Leitung empfangen wird. Abbildung 4 zeigt das Blockschaltbild.
Klicken für größeres Bild
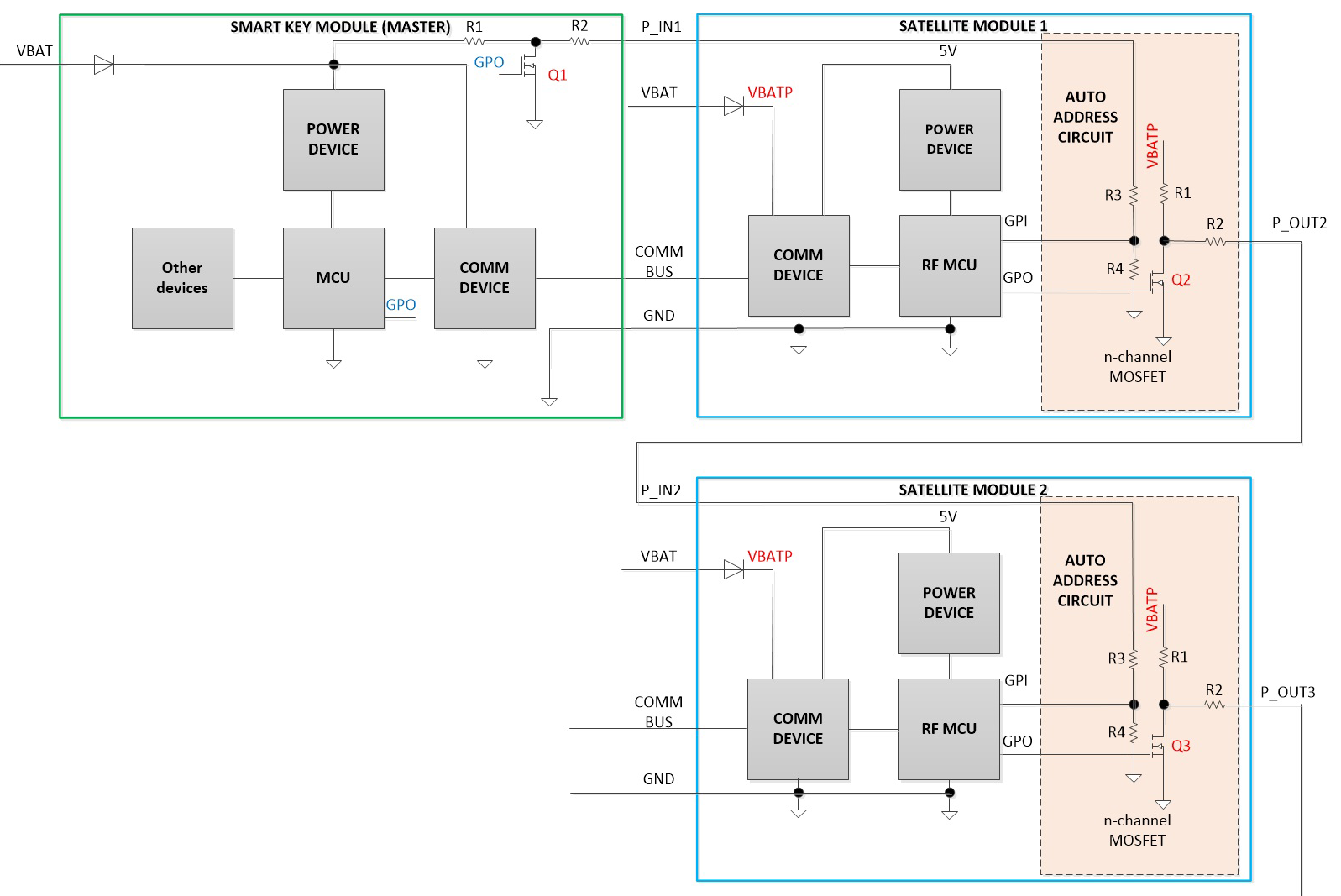 Abbildung 4. Die Einzeldraht-Autoadressierungsmethode ersetzt die LIN-PHYs durch einen MOSFET und einige Widerstände.
Abbildung 4. Die Einzeldraht-Autoadressierungsmethode ersetzt die LIN-PHYs durch einen MOSFET und einige Widerstände.
Das Zentralmodul leitet den Autoadressierungsprozess ein, indem es über den Feldeffekttransistor Q1 ein Pulsweitenmodulationssignal (PWM) auf der Leitung P_IN1 sendet. Über einen Spannungsteiler empfängt das erste Satellitenmodul das Wecksignal P_IN1 auf Batteriestand, das der Bluetooth-MCU signalisiert, auf den CAN-Bus zu „hören“. Parallel dazu beginnt das Zentralmodul ständig die CAN-ID des ersten Satellitenmoduls auf dem CAN-Bus zu übertragen. Sobald das erste Satellitenmodul die CAN-ID-Nachricht empfängt, sendet es eine Bestätigungsnachricht an das Zentralmodul zurück, um den ordnungsgemäßen Empfang der Adresse zu bestätigen. Nach dem Senden der Bestätigungsnachricht sendet das erste Satellitenmodul das PWM-Wecksignal an das zweite Satellitenmodul und signalisiert diesem Modul, mit dem Abhören des CAN-Busses zu beginnen und seine neue CAN-ID zu empfangen. Nachdem das Zentralmodul die Bestätigungsnachricht vom ersten Satellitenmodul empfangen hat, sendet der CAN-Bus ständig die CAN-ID-Nachricht des zweiten Satellitenmoduls, bis er eine Bestätigungsnachricht vom zweiten Satellitenmodul empfängt.
Zusammengefasst weckt jedes Satellitenmodul nacheinander das nächste, um die CAN-ID vom CAN-Bus zu empfangen. Das Zentralmodul inkrementiert die nächste gesendete CAN-ID, nachdem es eine Bestätigungsnachricht vom adressierten Satellitenmodul empfangen hat, bis alle Module adressiert sind*.
Obwohl es sich um eine Verbesserung handelt, erfordert diese Implementierung immer noch eine Verkabelung zwischen dem Zentralmodul und jedem der Satellitenmodule, wie in Abbildung 5 gezeigt.
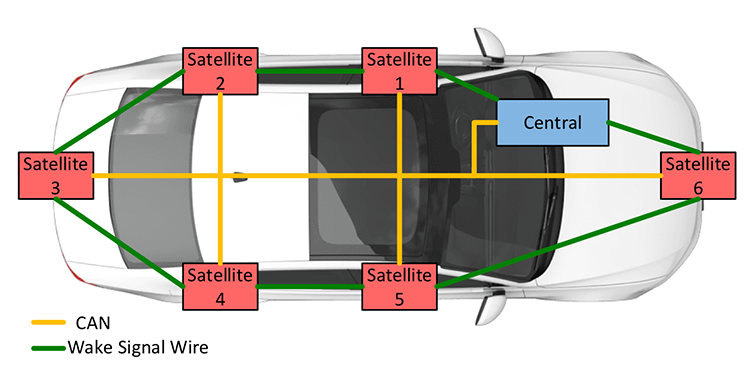
Abbildung 5. Die Eindraht-Auto-Adressierungsarchitektur erfordert immer noch eine Verdrahtung zwischen den Zentral- und Satellitenmodulen.
Drahtlose automatische Adressierung/Kabelaustausch
Texas Instruments hat auch eine automatische Adressierungsmethode entwickelt, die Bluetooth-Lokalisierungstechniken verwendet. Diese Techniken ermöglichen es, den Bluetooth-Satellitenmodulen während der Herstellung und nach dem Austausch eines Moduls eine CAN-Adresse vom Zentralmodul zuzuweisen. Der Moduladressierungsprozess beginnt mit dem Modul, das dem Zentralmodul am nächsten ist, und wird in der Reihenfolge vom nächsten bis zum weitesten Abstand fortgesetzt, bis das am weitesten entfernte Modul adressiert wird. Der tatsächliche Standort ist nicht erforderlich, da die Platzierung der Module, die Messtechnik und die Modulumgebung die gemessene Distanz bestimmen. Distance dn repräsentiert die gemessene Entfernung (aus der Anzeige der Bluetooth-Empfangssignalstärke [RSSI]), idealerweise:
d1
Abbildung 6 zeigt beispielsweise das Blockschaltbild und den Abstand zwischen jedem Modul und dem Zentralmodul.
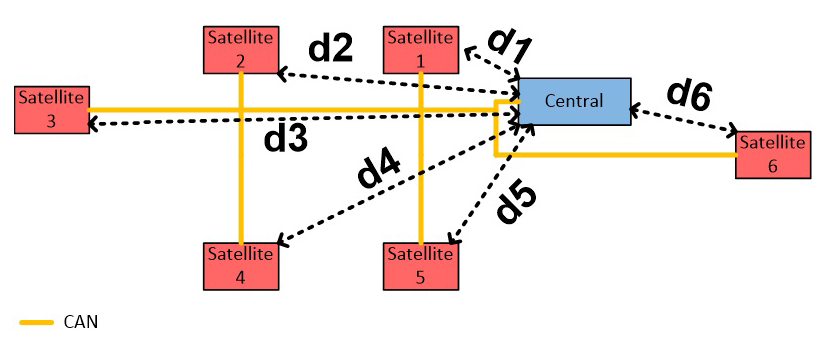
Abbildung 6. Dieses Diagramm zeigt die Abstände zwischen den einzelnen Modulen bei der drahtlosen automatischen Adressierungsmethode vom Zentralmodul aus.
In der Praxis kann die tatsächliche Entfernung aufgrund der Hochfrequenz-(RF)-Ausbreitungseigenschaften des Raums zwischen dem jeweiligen Satelliten und dem Zentralmodul von der gemessenen Entfernung abweichen. Solange die gemessene Entfernung von jedem Satellitenmodul jedoch wiederholt konsistent ist und es keine Überschneidung zwischen den gemessenen Entfernungen von mehreren Modulen gibt, kann das Zentralmodul sie richtig adressieren, ohne ihre genaue Position um das Fahrzeug herum zu kennen, da die gemessenen Entfernungen immer in der gleichen Reihenfolge vom kürzesten zum weitesten. Daher weiß das Zentralmodul aus vorherigen Tests, dass das erste Modul immer die Fahrertür (CAN-Adresse 1) ist, das zweite Modul immer der vordere Stoßfänger (CAN-Adresse 2) usw.
Um sicherzustellen, dass das automatische Adressierungsschema zuverlässig funktioniert, müssen sorgfältige Tests durchgeführt werden, um die Eigenschaften jedes Fahrzeugmodells zu verstehen, damit potenzielle Probleme identifiziert und behoben werden können. Wenn beispielsweise die Entfernungsmessungen des Zentralmoduls zwischen zwei oder mehr nicht adressierten Satellitenmodulen ähnlich oder gleich sind, kann ein zuvor adressiertes Satellitenmodul verwendet werden, um die nicht adressierten Module zu lokalisieren, die von der Zentrale nicht unterschieden werden konnten, wie in Abbildung 7 gezeigt. Dies kann auch mit mehreren Satellitenmodulen erfolgen.
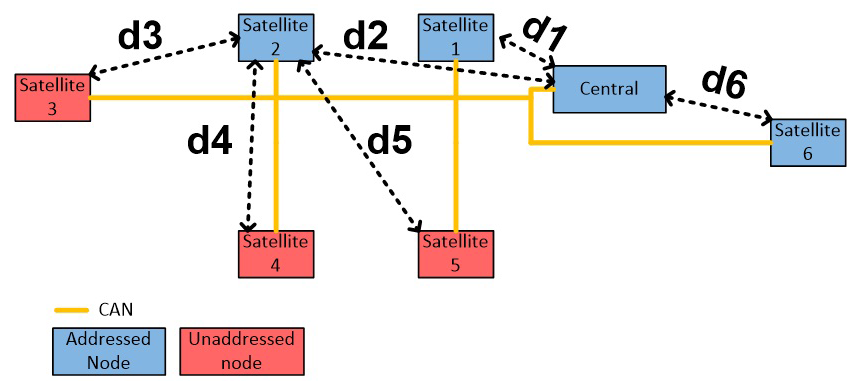
Abbildung 7. Ein zuvor adressiertes Satellitenmodul kann verwendet werden, um nicht adressierte Module zu lokalisieren, die vom Master nicht unterscheidbar waren.
Wenn das Zentralmodul die Satelliten 1, 2 und 6, aber nicht 3, 4 und 5 lokalisieren kann, wird das Satellitenmodul 2 dann verwendet, um die Entfernungen für die Satellitenmodule 3, 4 und 5 zu messen die Entfernungsmessungen sind konsistent und es gibt keine Überschneidungen bei den Entfernungsmessungen zwischen den Modulen, die Satellitenmodule können richtig adressiert werden und werden immer in der gleichen Reihenfolge adressiert.
Implementierung
Um der generischen Zugangsprofilschicht (GAP) des Bluetooth Low Energy-Protokolls zu entsprechen, werden wir das Zentralmodul als „Scanner“ und die Satellitenmodule als „Werbetreibende“ bezeichnen. Die GAP-Schicht handhabt die Zugriffsmodi und Prozeduren des Geräts, einschließlich Geräteerkennung, Verbindungsaufbau, Verbindungsbeendigung, Initiierung von Sicherheitsfunktionen und Gerätekonfiguration. Die zwei für die automatische Adressierung relevanten Zustände des Geräts sind:
- Werbetreibender:Das Gerät wirbt mit spezifischen Daten, die alle initiierenden Geräte wissen lassen, dass es sich um ein verbindbares Gerät handelt (Hinweis:Diese Werbung enthält die Geräteadresse und kann einige zusätzliche Daten wie den Gerätenamen enthalten).
- Scanner:Beim Empfang der Werbung sendet das Scan-Gerät eine Scan-Anfrage an den Werbetreibenden.
Der Inserent antwortet mit einer Scan-Antwort; Dieser Vorgang wird als Geräteerkennung bezeichnet. Das Scangerät kennt das Werbegerät und kann eine Verbindung mit diesem initiieren. Abbildung 8 zeigt unten den Ablauf des Werbetreibenden und des Scanners.
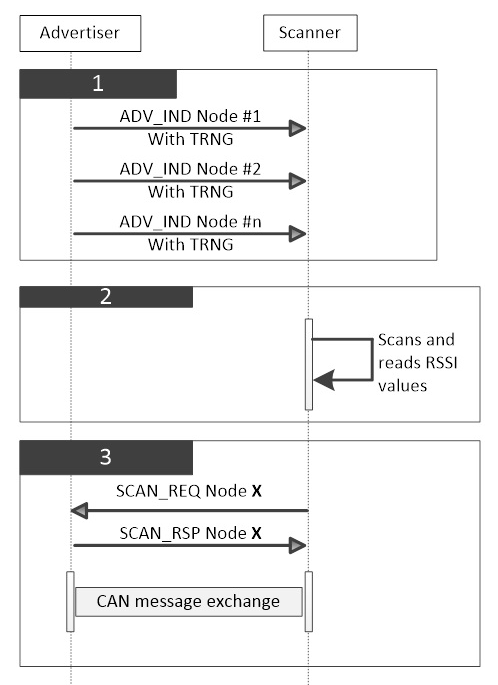
Abbildung 8. Dieses Diagramm der Bluetooth Low Energy-Software zeigt den Werbetreibenden- und Scanner-Flow.
In Abbildung 8 werben alle Werbetreibenden mit bestimmten Daten, sie generieren eine echte Zufallszahl, die als Teil ihrer Werbedaten verwendet wird. Dies garantiert keine Knotenduplizierung.
Der Scanner scannt mehrmals und liest die RSSI-Werte von jedem der Werbetreibenden; Es wird dann den Durchschnitt der RSSI-Werte bilden, um den Werbetreibenden zu bestimmen, der ihm am nächsten ist.
Der Scanner sendet eine SCAN-Anfrage an den nächstgelegenen Werbetreibenden; es wird dann die CAN-Nachricht mit automatischer Adressierung übertragen und auf die Bestätigung der CAN-Nachricht des Werbetreibenden warten.
Der Werbetreibende verwendet SCAN_REQ, um die automatische CAN-Adresse zu aktivieren. Wenn der Werbetreibende die CAN-Nachricht mit automatischer Adressierung empfängt, sendet er die CAN-Bestätigungsnachricht und stoppt die Werbung.
Diese Schritte wiederholen sich, bis alle Werbetreibenden automatisch adressiert wurden.
Ergebnisse
Die Tests wurden mit dem Referenzdesign des Bluetooth Low Energy + CAN-Satellitenmoduls für den Autozugang zusammen mit einem 12-Fuß-Kabelbaum durchgeführt. Der Abstand zwischen den einzelnen Anschlüssen betrug etwa 1,8 m (Abbildung 9).
Klicken für größeres Bild
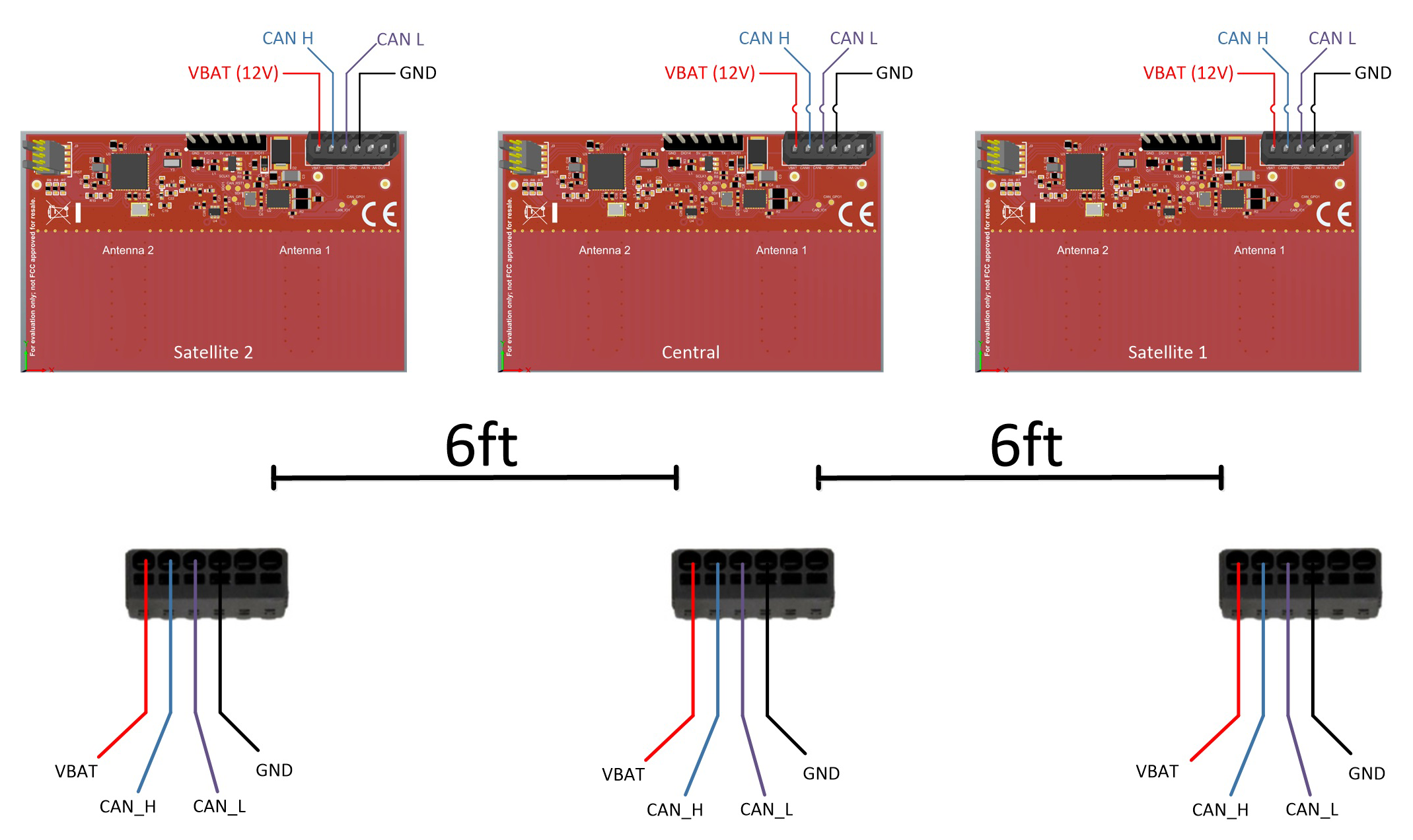
Abbildung 9. Das Hardware-Setup zum Testen umfasst das TIDA-020032-Referenzdesign.
Und die Bretter wurden wie in Abbildung 10 gezeigt platziert (wobei d1 ~ 4 ft und d2 ~ 8 ft):
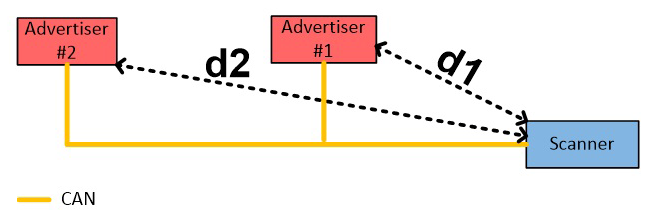
Abbildung 10. Dieses Diagramm zeigt die Hardware-Platzierung zum Testen.
Die Bluetooth Low Energy-Parameter für den Scanner waren eine Scandauer von 1 s und ein Scanfenster und -intervall von 250 ms. Die Bluetooth Low Energy-Parameter der Werbetreibenden für die Werbetreibenden wurden während eines 100-ms-Intervalls bekannt gegeben. Während jeder Messperiode nahm der Scanner 10 RSSI-Abtastungen pro Knoten und mittelte jeden Satz von Messungen, um den gemessenen Distanzwert jedes Werbetreibenden zu ermitteln.
Vergleich von drei automatischen Adressierungsschemata
Die Ergebnisse des vorherigen Tests sind in Tabelle 1 zusammengefasst, in der die relative Verzögerung, Zuverlässigkeit und Implementierungskosten jeder der drei in diesem Artikel beschriebenen automatischen Adressierungstechniken verglichen werden.
Tabelle 1. Vergleich der automatischen Adressierungstechniken
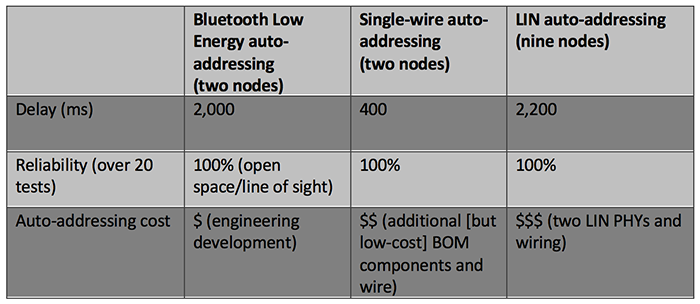
Tabelle 1 vergleicht die Ergebnisse unseres drahtlosen Bluetooth-Low-Energy-Adressierungstests mit den beiden zuvor besprochenen drahtgebundenen automatischen Adressierungstechniken. Aus diesen Ergebnissen geht hervor, dass die drahtlose Technik etwa fünfmal länger dauert als die drahtgebundenen Techniken. Eine bessere und schnellere Reaktion kann durch eine weitere Verfeinerung der Parameter des Bluetooth Low Energy-Netzwerks erreicht werden; es gibt Raum für Verbesserungen. Dies erfordert weitere Tests, da die tatsächliche Entfernung aufgrund der HF-Ausbreitungseigenschaften, die mit der jeweiligen Position jedes Knotens im Fahrzeug verbunden sind (d. h. Herausforderungen ohne Sichtlinie), von der gemessenen Entfernung abweichen kann.
Die drahtlose Auto-Adressierung ist aus Materialsicht die kostenoptimierteste Lösung und erfordert keine zusätzliche Hardware und keine zusätzliche Verkabelung zwischen den Modulen. Um jedoch diese Vorteile nutzen zu können, müssen Systemdesigner Tests durchführen, um die HF-Leistung bereitzustellen, um die Software zu optimieren und Ungenauigkeiten zu berücksichtigen. Wenn Sie einen kabelgebundenen Ansatz bevorzugen, erfordert die kabelgebundene automatische Adressierungsmethode von TI das Hinzufügen einiger kleiner und kostengünstiger Komponenten zur Stückliste, zusammen mit Drähten, die zwischen den einzelnen Modulen verbunden sind. Zusammen bieten sie eine Reihe von Optionen bei der Auswahl einer Methode zur Implementierung automatischer Adressierungsfunktionen für Bluetooth-Autozugangssysteme.
* Weitere Details und Testergebnisse zur automatischen Eindraht-Adressierungsmethode finden Sie im Referenzdesign-Leitfaden für das Autozugriffs-Bluetooth Low Energy + CAN-Satellitenmodul von Texas Instruments.
Referenzen
- Bluetooth-Kernspezifikationen
- Der Verbindungsstandard setzt neue Sicherheitsstandards, Bluetooth SIG
>> Dieser Artikel wurde ursprünglich veröffentlicht am unsere Schwesterseite EDN.
Eingebettet
- C#-Konstruktor
- Verschachtelte C#-Klasse
- Überladen des C#-Konstruktors
- Entwerfen mit Bluetooth Mesh:Chip oder Modul?
- Cervoz:DDR4 SO-DIMM mit sehr niedrigem Profil
- Ultra-Breitband-Chip ermöglicht Smartphone-basierten Fahrzeugzugang
- Kleines Bluetooth 5.0-Modul integriert Chipantenne
- Kleines KI-Modul baut auf Google Edge TPU auf
- Front-End-Modul vereinfacht das Wi-Fi 6-Design
- ams:Modul beschleunigt Entwicklung von Ultraschall-Wasserzählern