


Die Wellenlängenauswahl in LiDAR-Systemen verstehen
Es gibt verschiedene Arten von LiDAR. Diejenigen, die in der Autoindustrie tätig sind, sollten sich der relativen Stärken und Schwächen jedes einzelnen bewusst sein.
Es ist allgemein anerkannt, dass fortschrittliche Fahrerassistenzsysteme (ADAS) und autonomes Fahren (AD) mit einer effektiven Erfassung der Umgebung des Fahrzeugs erfolgreich sein können, die in die Algorithmen einfließt, die eine autonome Navigation ermöglichen. Angesichts der absoluten Abhängigkeit von der Wahrnehmung in lebenskritischen Situationen werden mehrere Sensormodalitäten verwendet, wobei die Daten miteinander verschmolzen werden, um sich gegenseitig zu ergänzen und Redundanz zu bieten. Dadurch kann jede Technologie ihre Stärken ausspielen und eine besser kombinierte Lösung liefern.
Die drei Modalitäten, die in Zukunft für den in Fahrzeugen verwendeten Sensor für ADAS und AD im Vordergrund stehen werden, sind Bildsensoren, Radar und LiDAR (Light Detection and Ranging). Jeder dieser Sensoren hat seine eigenen Stärken und zusammen können sie eine vollständige Sensorsuite bilden, die Daten liefert, damit die autonomen Wahrnehmungsalgorithmen Entscheidungen mit Sensorfusion treffen können – die Fähigkeit, Farbe, Intensität, Geschwindigkeit und Tiefe für jeden Punkt oder Kernel bereitzustellen die Szene.
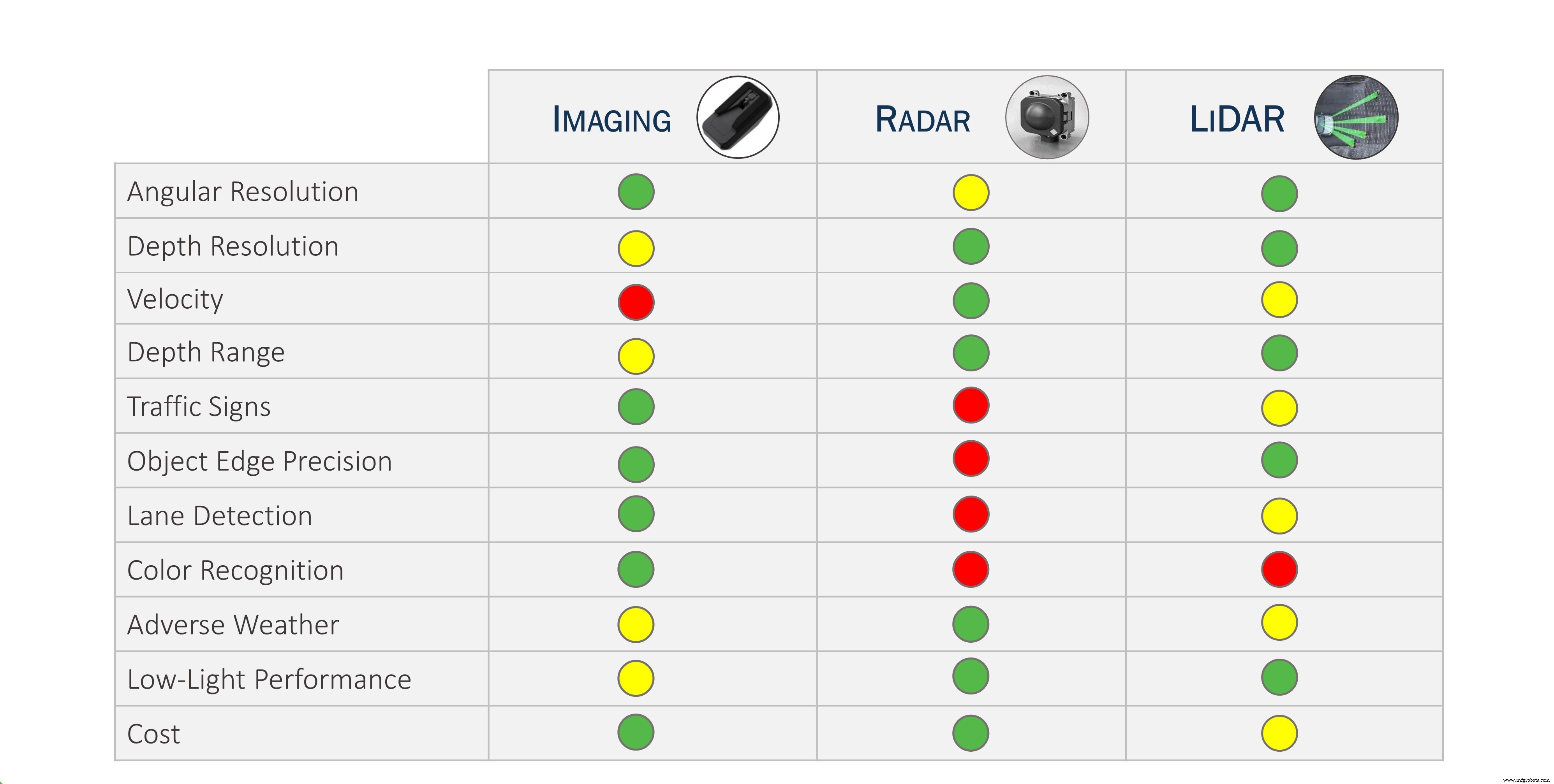
Abbildung 1:Sensorfusion nutzt die Stärken jeder Modalität, um vollständige Informationen über die Umgebung des Fahrzeugs bereitzustellen.
Von diesen drei Hauptmodalitäten ist LiDAR die am weitesten aufkommende Technologie, die für den Massenmarkt kommerzialisiert wird, obwohl das Konzept der Verwendung von Licht zur Entfernungsmessung Jahrzehnte zurückreicht. Der Markt für Automobil-LiDAR wird laut Yole Développement ein spektakuläres Wachstum von 39 Millionen US-Dollar im Jahr 2020 auf voraussichtlich 1,75 Milliarden US-Dollar im Jahr 2025 aufweisen, angetrieben durch die Verbreitung autonomer Systeme, die die komplette Sensorsuite erfordern. Die Chance ist so groß, dass weit über 100 Unternehmen an der LiDAR-Technologie arbeiten, wobei die kumulierten Investitionen in diese Unternehmen bis 2020 1,5 Milliarden US-Dollar übersteigen – und dies war vor der Flut von SPAC-getriebenen Börsengängen von mehr als einer Handvoll LiDAR-Unternehmen, die Ende 2020 gegründet wurden. Aber wenn so viele Unternehmen an einer einzigen Technologie arbeiten – von denen sich einige grundlegend unterscheiden, wie die verwendete Wellenlänge des Lichts (prominente Beispiele sind 905 nm und 1550 nm) – ist es unvermeidlich, dass es eine gewinnbringende Technologie und Konsolidierung sein, wie es immer wieder gezeigt wurde, sei es Ethernet für Netzwerke oder VHS für Video.
Betrachtet man die Nutzer der LiDAR-Technologie – die Automobilhersteller, aber auch die Unternehmen, die autonome Roboterfahrzeuge für den Personen- und Gütertransport konstruieren und bauen –, so denken sie vor allem an deren Anforderungen. Letztendlich möchten diese Unternehmen, dass ihre Lieferanten ihnen kostengünstige LiDAR-Sensoren mit einem hohen Maß an Zuverlässigkeit zur Verfügung stellen und gleichzeitig die Leistungsspezifikationen für die Entfernungsmessung und Detektion von Objekten mit geringem Reflexionsvermögen erfüllen. Obwohl alle Ingenieure eine starke Meinung haben, werden diese Unternehmen der Implementierung der Technologie wahrscheinlich agnostisch gegenüberstehen, wenn der Lieferant die Leistungs- und Zuverlässigkeitsanforderungen zu den richtigen Kosten erfüllen kann. Und das führt zu der grundlegenden Debatte, die mit diesem Artikel beigelegt werden soll:Welche Wellenlänge wird sich für automobile LiDAR-Anwendungen durchsetzen?
LiDAR-Übersicht
Um mit dieser Frage zu beginnen, ist es notwendig, die Anatomie eines LiDAR-Systems zu verstehen, von dem es verschiedene Architekturen gibt. Kohärentes LiDAR, das als frequenzmodulierte kontinuierliche Welle (FMCW) bezeichnet wird, mischt ein übertragenes Lasersignal mit reflektiertem Licht, um die Entfernung und Geschwindigkeit von Objekten zu berechnen. FMCW bietet einige Vorteile, bleibt jedoch im Vergleich zum gängigsten LiDAR-Ansatz, dem Direct-Time-of-Flight (dToF) LiDAR, relativ ungewöhnlich. Diese Implementierung misst die Entfernung zu einem Objekt, indem sie zeitlich abstimmt, wie lange es dauert, bis ein sehr kurzer Lichtimpuls, der von einer Beleuchtungsquelle ausgesendet wird, von einem Objekt reflektiert und zurückgekehrt wird, um vom Sensor erfasst zu werden. Es nutzt die Lichtgeschwindigkeit, um direkt Berechnen Sie die Entfernung zum Objekt mithilfe der einfachen mathematischen Formel für Zeit, Geschwindigkeit und Entfernung. Ein typisches dToF-LiDAR-System hat sechs Haupthardwarefunktionen, obwohl die Wahl der Wellenlänge hauptsächlich die Sende- und Empfangsfunktionen beeinflusst.
Klick für Bild in voller Größe
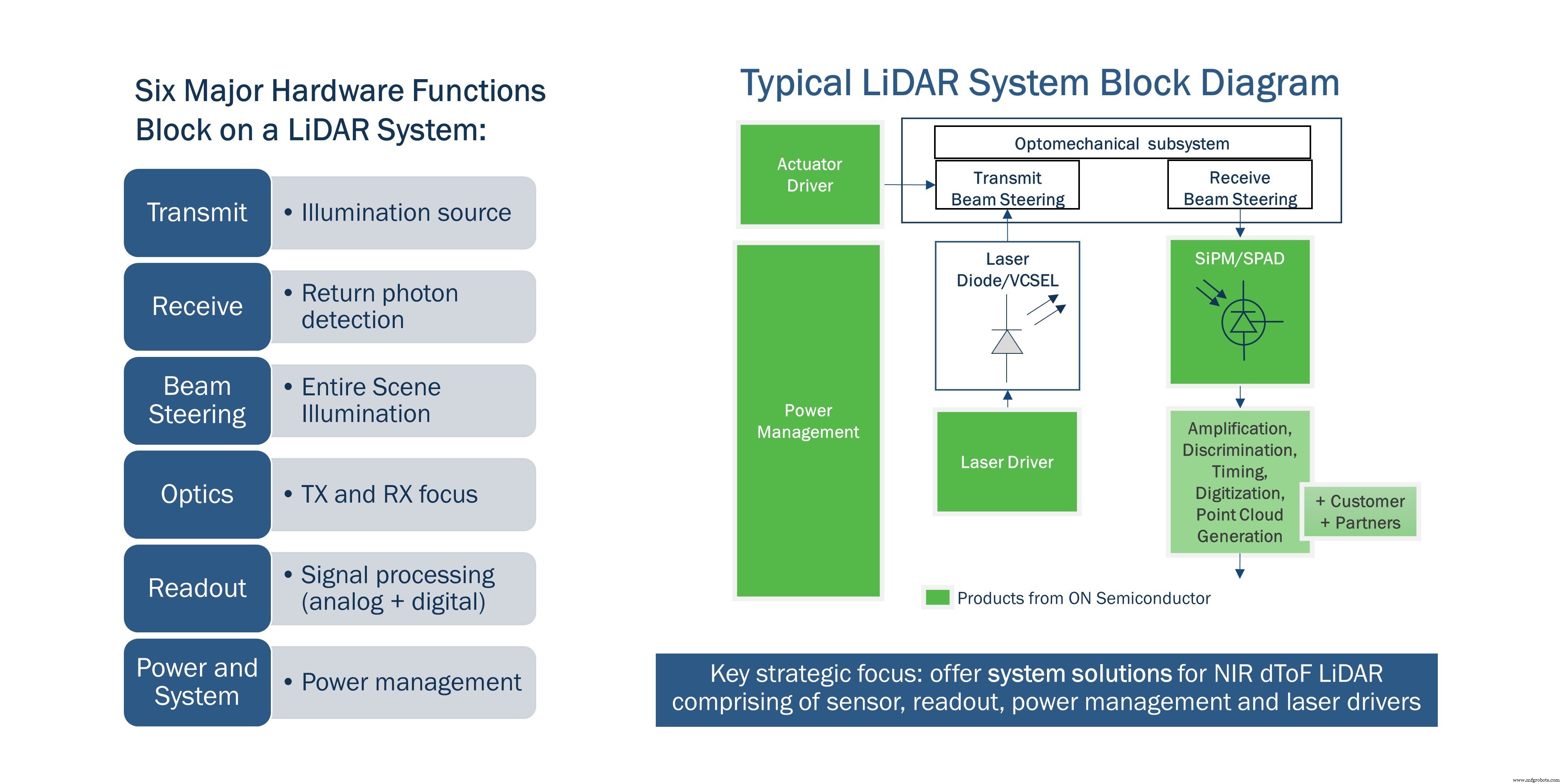
Abbildung 2:Ein Blockdiagramm eines typischen dToF-Systems mit grünen Teilen, die einige Schwerpunktbereiche von ON Semiconductor-Produkten darstellen.
Tabelle 1 zeigt eine Liste der verschiedenen LiDAR-Hersteller, die von bekannten Automobil-Tier-1 bis hin zu Start-ups in allen Regionen der Welt reichen. Basierend auf Marktberichten und öffentlichen Informationen betreibt die überwiegende Mehrheit dieser Unternehmen ihre LiDARs im nahen Infrarot (NIR) im Gegensatz zu kurzwelligen Infrarot (SWIR) Wellenlängen. Während die SWIR-fokussierten Lieferanten, die an FMCW arbeiten, auf diese Wellenlängen beschränkt sind, haben die meisten mit einer direkten Laufzeitimplementierung einen Weg zu einem System mit NIR-Wellenlängen, falls sie dies wünschen, während sie gleichzeitig in der Lage sind, a viele ihrer bestehenden IP um Funktionen wie Beam-Steering und Signalverarbeitung.
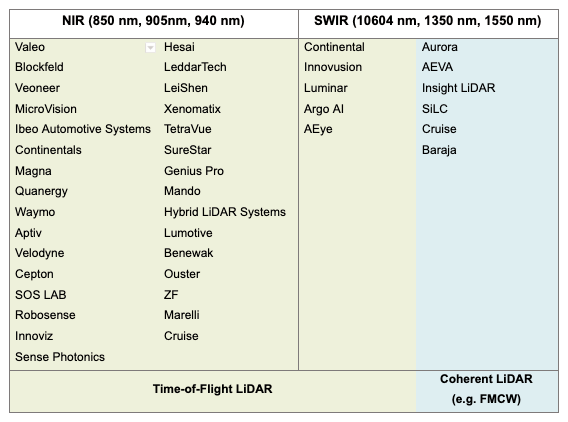
Tabelle 1:Liste der LiDAR-Hersteller, die in NIR- und SWIR-Wellenlängen arbeiten. Keine vollständige Liste. (Bildquelle:Yole, IHS Markit und öffentliche Offenlegungen)
Angesichts der Tatsache, dass sich die Mehrheit, aber nicht alle, dieser Hersteller für NIR-Wellenlängen entschieden haben, sollte man sich überlegen, wie sie zu dieser Entscheidung kamen und welche Auswirkungen dies hat. Im Mittelpunkt der Diskussion stehen einige grundlegende Physik im Zusammenhang mit den Eigenschaften von Licht- und Halbleitermaterialien, aus denen die in LiDAR verwendeten Komponenten bestehen.
Vom Laser abgefeuerte Photonen in einem LiDAR-System, die von Objekten reflektiert und vom Detektor empfangen werden sollen, müssen mit Umgebungsphotonen konkurrieren, die von der Sonne kommen. Betrachtet man das Spektrum der Sonnenstrahlung und berücksichtigt die atmosphärische Absorption, gibt es bei bestimmten Wellenlängen „Einbrüche“ in der Bestrahlungsstärke, die die Menge der als Rauschen für das System vorhandenen Photonen reduzieren würden. Bei 905 nm ist die Sonneneinstrahlung etwa dreimal höher als bei 1550 nm, was bedeutet, dass ein NIR-System mit mehr Rauschen zu kämpfen hat, das den Sensor stören kann. Dies ist jedoch nur einer der Faktoren, die bei der Auswahl einer Wellenlänge für ein LiDAR-System zu berücksichtigen sind.
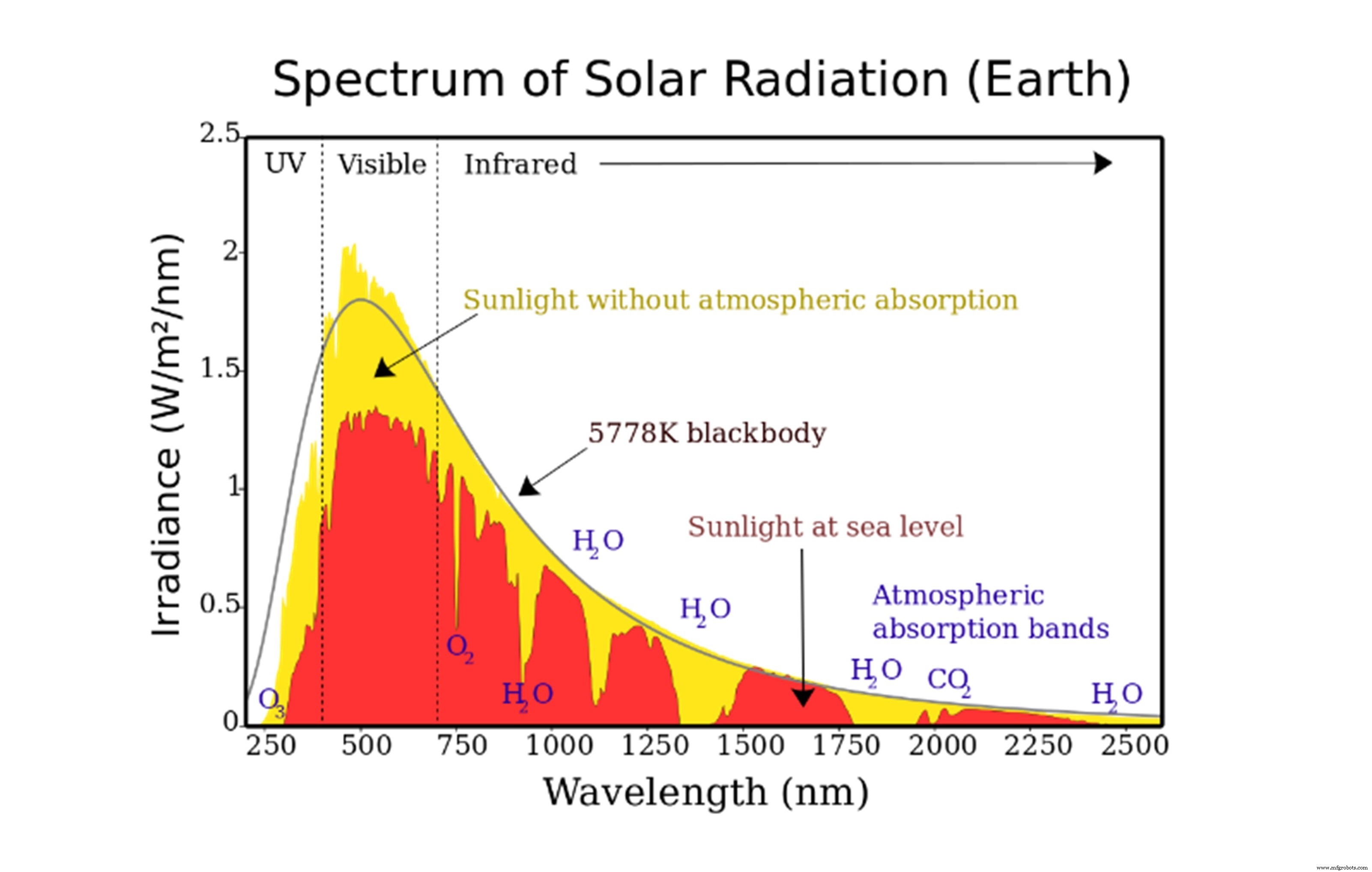
Abbildung 3:Atmosphärische Lichtabsorption führt zu klaren Peaks.
Sensoren
Die für die Erfassung der Photonen im LiDAR-System verantwortlichen Komponenten sind verschiedene Arten von Photodetektoren. Daher ist es wichtig zu erklären, warum sie je nach zu detektierender Wellenlänge aus unterschiedlichen Halbleitermaterialien bestehen können. In einem Halbleiter trennt eine Bandlücke das Valenz- und das Leitungsband. Photonen liefern die Energie, um Elektronen zu helfen, diese Bandlücke zu überwinden und den Halbleiter leitfähig zu machen, wodurch ein Photostrom erzeugt wird. Die Energie jedes Photons hängt mit seiner Wellenlänge zusammen, die Bandlücke eines Halbleiters mit seiner Empfindlichkeit – deshalb werden je nach Wellenlänge des zu detektierenden Lichts unterschiedliche Halbleitermaterialien benötigt. Silizium, der am häufigsten und am billigsten herzustellende Halbleiter, reagiert auf sichtbare und NIR-Wellenlängen bis zu etwa 1000 nm. Um Wellenlängen jenseits des SWIR-Bereichs zu detektieren, können exotischere Halbleiter der Gruppe III/V legiert werden, um Materialien wie InGaAs in der Lage zu machen, diese Lichtwellenlängen von 1000 nm bis 2500 nm zu detektieren.
Frühe LiDARs verwendeten PIN-Photodioden als Sensoren. PIN-Fotodioden haben keine inhärente Verstärkung und können daher schwache Signale nicht leicht erkennen. Avalanche-Photodioden (APDs) sind der bekannteste Sensortyp, der heute in LiDAR verwendet wird, und bieten eine moderate Verstärkung. APDs müssen jedoch auch im linearen Modus wie PIN-Photodioden arbeiten, um das Signal von Photonenankünften zu integrieren, und leiden auch unter einer schlechten Gleichmäßigkeit von Teil zu Teil, während sie sehr hohe Vorspannungen erfordern. Die neuesten Sensortypen, die zunehmend in LiDARs verwendet werden, basieren auf Single-Photon-Avalanche-Dioden (SPADs), die eine sehr große Verstärkung aufweisen und in der Lage sind, aus jedem einzelnen detektierten Photon einen messbaren Stromausgang zu erzeugen. Silizium-Photomultiplier (SiPMs) sind Arrays von siliziumbasierten SPADs, die den zusätzlichen Vorteil haben, einzelne Photonen von mehreren Photonen unterscheiden zu können, indem sie die Amplitude des erzeugten Signals betrachten.
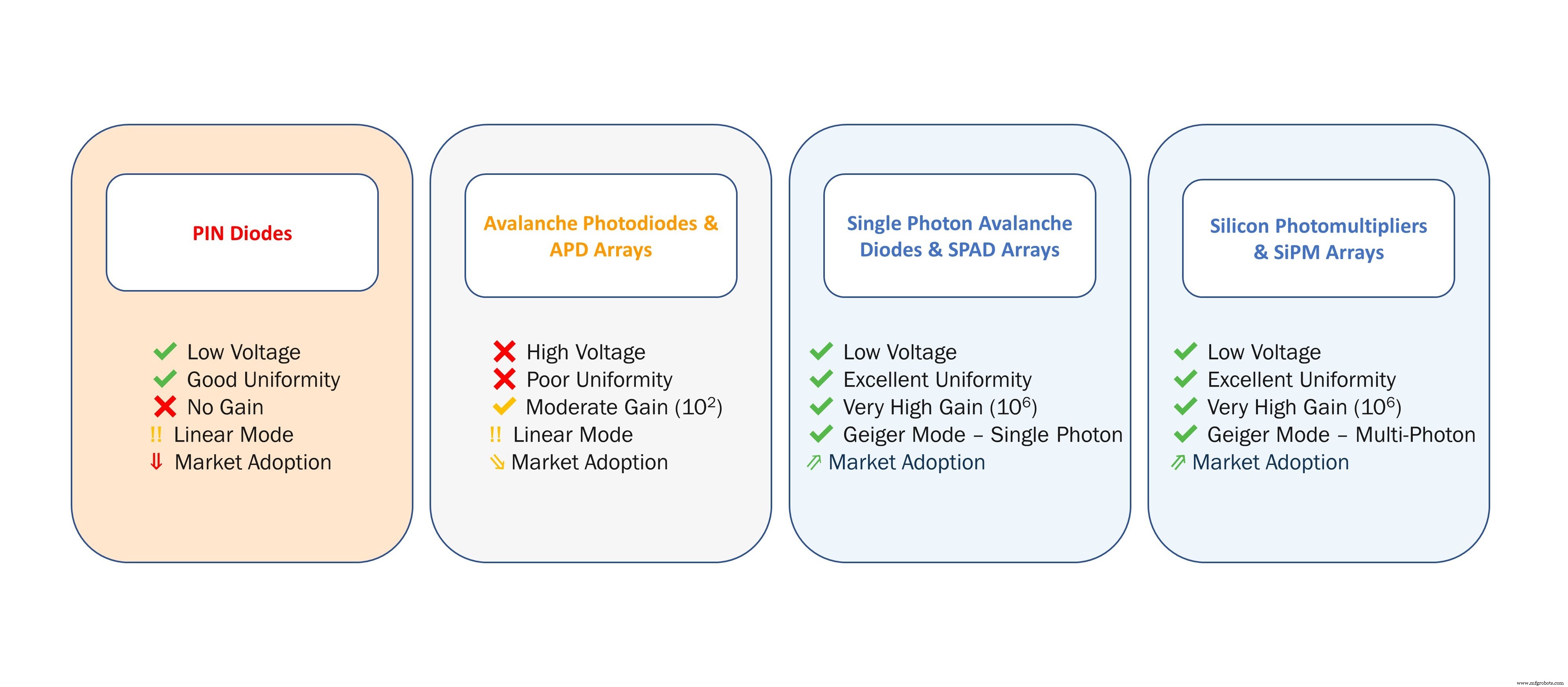
Abbildung 4:Verschiedene Arten von Photodetektoren, die verwendet werden, um Signale in einem LiDAR zu erkennen
Zurück zur Relevanz für das Thema Wellenlängen:Alle diese Arten von Photodetektoren können auf Silizium (für die NIR-Detektion) oder III/V-Halbleitern (für die SWIR-Detektion) gebaut werden. Andererseits sind Herstellbarkeit und Kosten der Schlüssel zur Rentabilität der Technologie, und CMOS-Siliziumgießereien ermöglichen die kostengünstige Herstellung solcher Sensoren in großen Stückzahlen. Dies ist ein Hauptgrund, warum SiPMs zunehmend für LiDAR verwendet werden, zusätzlich zu einer höheren Leistung. Obwohl es APDs und SPADs für SWIR gibt, ist es schwierig, sie in die Ausleselogik zu integrieren, da die Prozesse nicht auf Silizium basieren. Schließlich wurden III/V-basierte SPAD-Arrays und Photomultiplier (analog zu SiPMs) für SWIR noch nicht kommerzialisiert, sodass die Verfügbarkeit des Ökosystems die NIR-Wellenlängen begünstigt.
Laser
Die Erzeugung von Photonen erfordert einen ganz anderen Prozess. Ein Halbleiter-p-n-Übergang als Verstärkungsmedium kann verwendet werden, um einen Laser herzustellen; Dies geschieht durch Pumpen eines Stroms durch den Übergang, der die resonante Emission von Photonen bewirkt, wenn Atome in niedrigere Energiebänder gehen, was zu einer kohärenten Laserstrahlausgabe führt. Halbleiterlaser basieren auf Materialien mit direkter Bandlücke wie GaAs und InP, die für die Erzeugung von Photonen effizient sind, die auftritt, wenn Atome in ein niedrigeres Energieband gehen, im Gegensatz zu Materialien mit indirekter Bandlücke wie Silizium.
Es gibt zwei Haupttypen von Lasern, die in LiDAR verwendet werden:kantenemittierende Laser (EEL) und oberflächenemittierende Laser mit vertikaler Kavität (VCSEL). EELs werden heute aufgrund ihrer geringeren Kosten und höheren Ausgangseffizienz als VCSELs häufiger verwendet. Sie sind schwieriger zu verpacken und in Arrays einzubauen und leiden auch unter einer Wellenlängenverschiebung über die Temperatur, die dazu führt, dass die Detektoren nach einem breiteren Band von Photonenwellenlängen suchen müssen, wodurch auch mehr Umgebungsphotonen als Rauschen erfasst werden können. Trotz der höheren Kosten und der geringeren Energieeffizienz hat die neuere VCSEL-Technologie den Vorteil einer einfachen und effizienten Verpackung, da der Strahl von oben erzeugt wird. Die Marktakzeptanz von VCSEL nimmt zu, da seine Kosten weiter deutlich sinken und sich die Energieeffizienz verbessert. EELs und VCSELs gibt es sowohl für die NIR- als auch für die SWIR-Wellenlängenerzeugung, mit einem wesentlichen Unterschied – NIR-Wellenlängen können mit GaAs erzeugt werden, während SWIR-Wellenlängen die Verwendung von InGaAsP erfordern. GaAs-Laser können größere Wafer-Foundries verwenden, was zu niedrigeren Kosten führt, was wiederum auf einen Vorteil für das Ökosystem der NIR-LiDAR-Hersteller sowohl aus Kosten- als auch aus Sicht der Lieferkettensicherheit hindeutet.
Klick für Bild in voller Größe
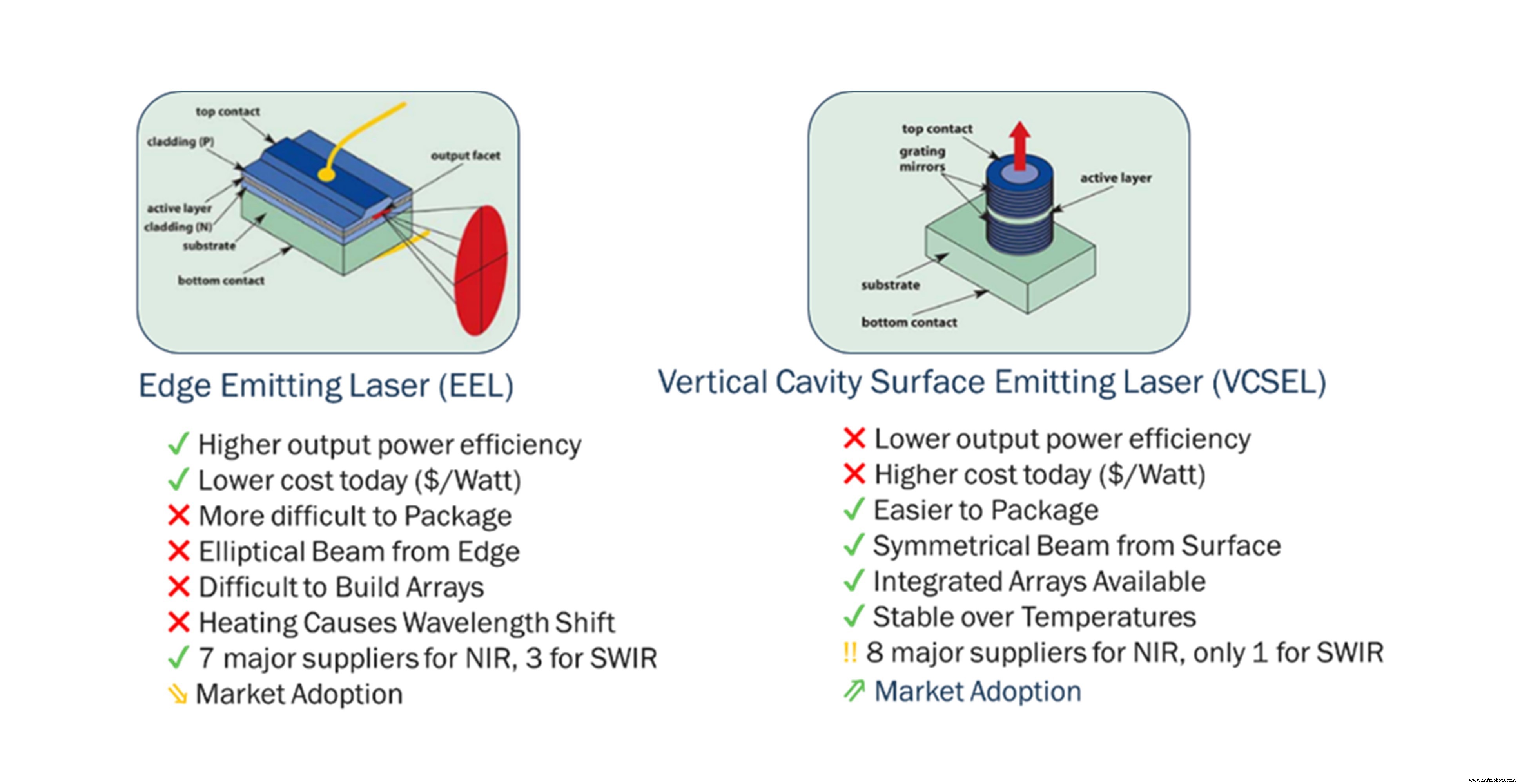
Abbildung 5:Verschiedene Lasertypen, die in einem LiDAR verwendet werden.
Laserleistung und Augensicherheit
Bei der Diskussion über die Wellenlängendebatte ist es unerlässlich, die Auswirkungen eines LiDAR-Systems auf die Augensicherheit zu berücksichtigen. Das Konzept von dToF LiDAR besteht darin, kurze Laserpulse mit einer hohen Spitzenleistung über einen bestimmten Blickwinkel zu verwenden, die auf die Szene emittiert werden. Ein Fußgänger, der im Weg des Emissionspfades eines LiDAR steht, muss sicher sein, dass seine Augen nicht durch einen Laser beschädigt werden, der in seine Richtung abgefeuert wird, und IEC-60825 ist eine Spezifikation, die vorschreibt, wie viel die maximal zulässige Exposition über die verschiedenen Wellenlängen des Lichts. Während NIR-Licht, ähnlich dem sichtbaren Licht, die Hornhaut durchdringen und die Netzhaut des menschlichen Auges erreichen kann, wird SWIR-Licht größtenteils in der Hornhaut absorbiert und kann dadurch höher belichtet werden.
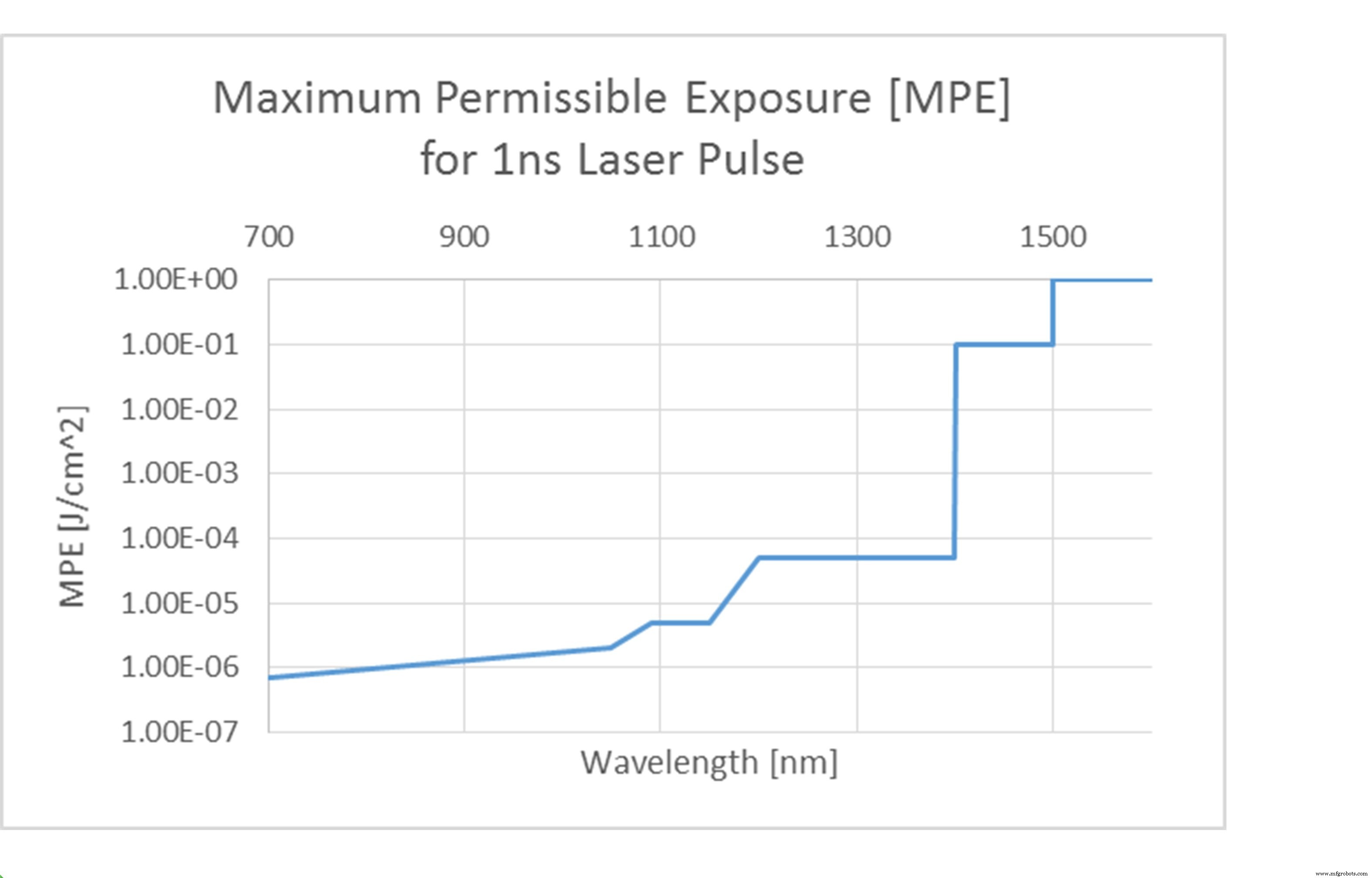
Abbildung 6:IEC-60825-Spezifikation für augensichere Laserbelichtung.
Die Möglichkeit, eine um mehrere Größenordnungen höhere Laserleistung auszugeben, ist aus Leistungssicht für ein 1550-nm-basiertes System ein Vorteil, da mehr Photonen ausgesendet und somit zur Detektion zurückgegeben werden können. Höhere Laserleistungen gehen jedoch auch mit einem thermischen Kompromiss einher. Es sollte beachtet werden, dass unabhängig von der Wellenlänge ein augensicheres Design erfolgen muss, indem die Energie pro Puls und die Größe der Laserapertur klar berücksichtigt werden. Bei einem 905-nm-basierten LiDAR kann die Spitzenleistung durch einen dieser Faktoren erhöht werden, wie in Abbildung 7 gezeigt.
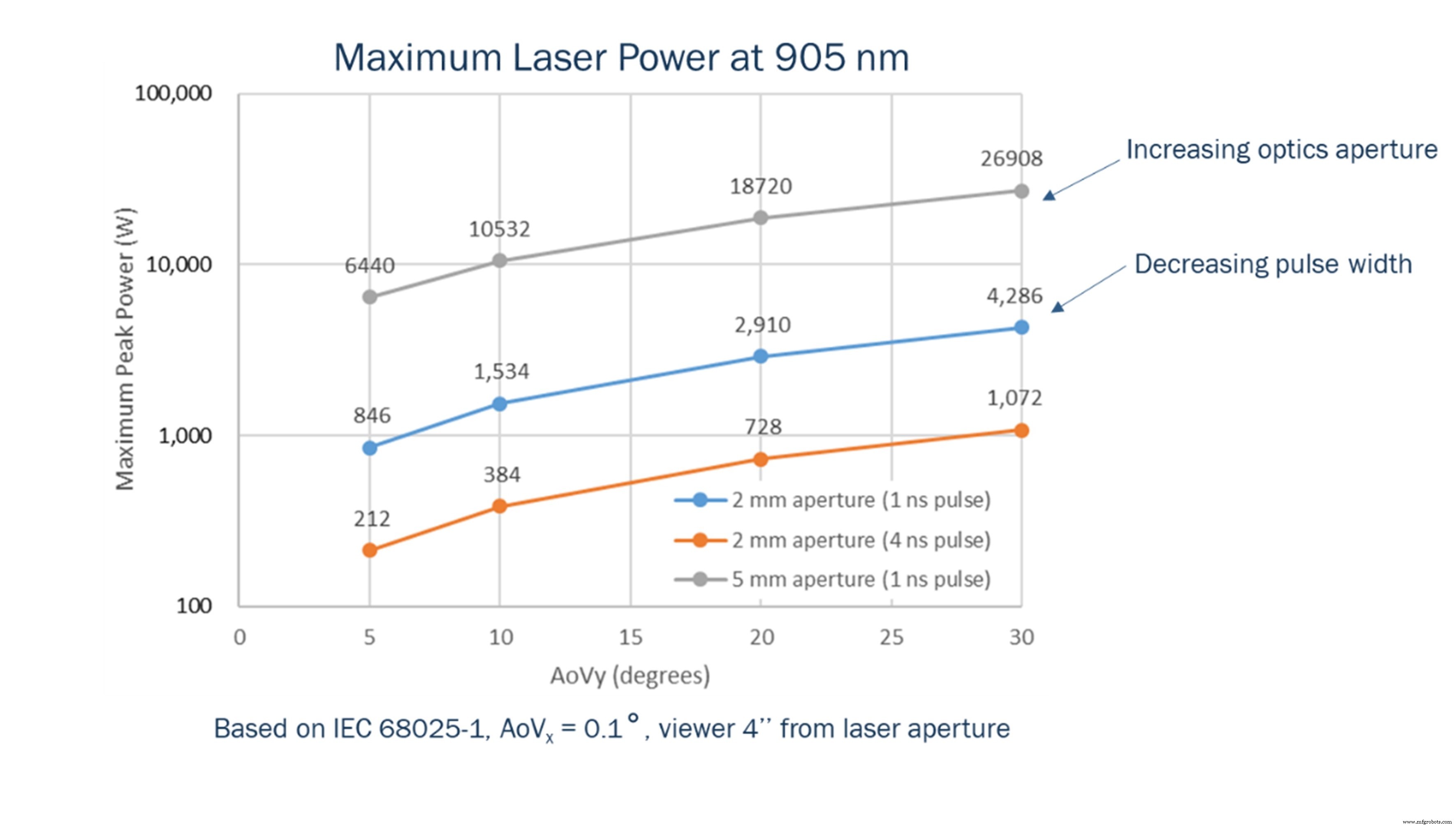
Abbildung 7:Augensicheres Laserdesign für einen NIR-LiDAR bei unterschiedlichen Optiken und Laserparametern.
Vergleich von NIR- und SWIR-LiDAR-Systemen
Der obige Fokus auf die auszugebende Laserleistung bringt uns zurück zu den verwendeten Sensoren. Ein leistungsstärkerer Sensor, der schwächere Signale erkennen kann, wird dem System in mehrfacher Hinsicht deutlich zugute kommen – in der Lage sein, eine größere Reichweite zu erzielen oder weniger Laserleistung zu verwenden, um die gleiche Reichweite zu erzielen. ON Semiconductor hat eine Reihe von SiPMs für NIR-LiDAR entwickelt, die die Photonenerkennungseffizienz (PDE) – einen Schlüsselparameter, der die Empfindlichkeit anzeigt – mit seinen neuesten Sensoren der RDM-Serie auf marktführende 18 % steigern.
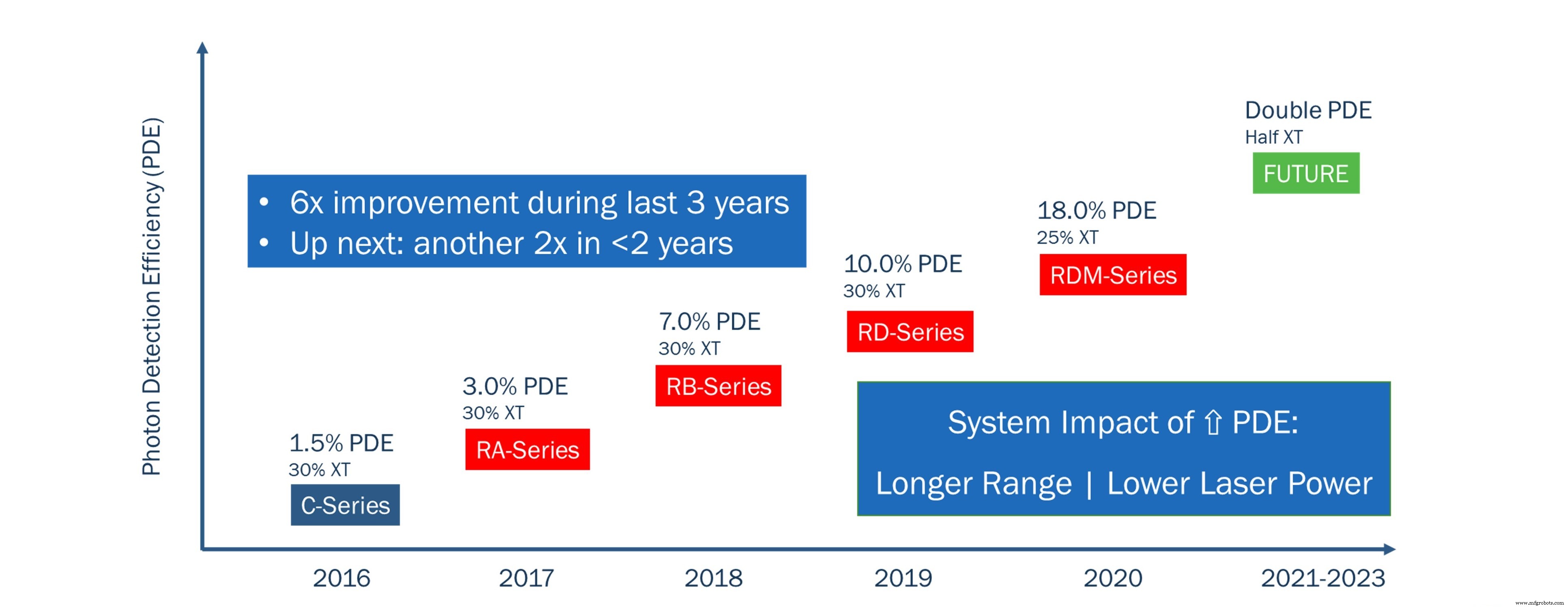
Abbildung 8:Prozess-Roadmap von ON Semiconductor SiPMs.
Um die Leistung eines NIR-dToF-LiDAR mit einem SWIR-dToF-LiDAR zu vergleichen, haben wir eine Systemmodellierung für identische LiDAR-Architekturen und Umgebungsbedingungen mit unterschiedlichen Parametern für die Laser und Sensoren durchgeführt. Die LiDAR-Architektur ist ein koaxiales System mit einem 16-Kanal-Detektor-Array und einem Abtastmechanismus zur Verteilung über das Sichtfeld, wie in Abbildung 10 gezeigt. Dieses Systemmodell wurde mit Hardware validiert und ermöglicht es uns, die Leistung von LiDAR . genau abzuschätzen Systeme.
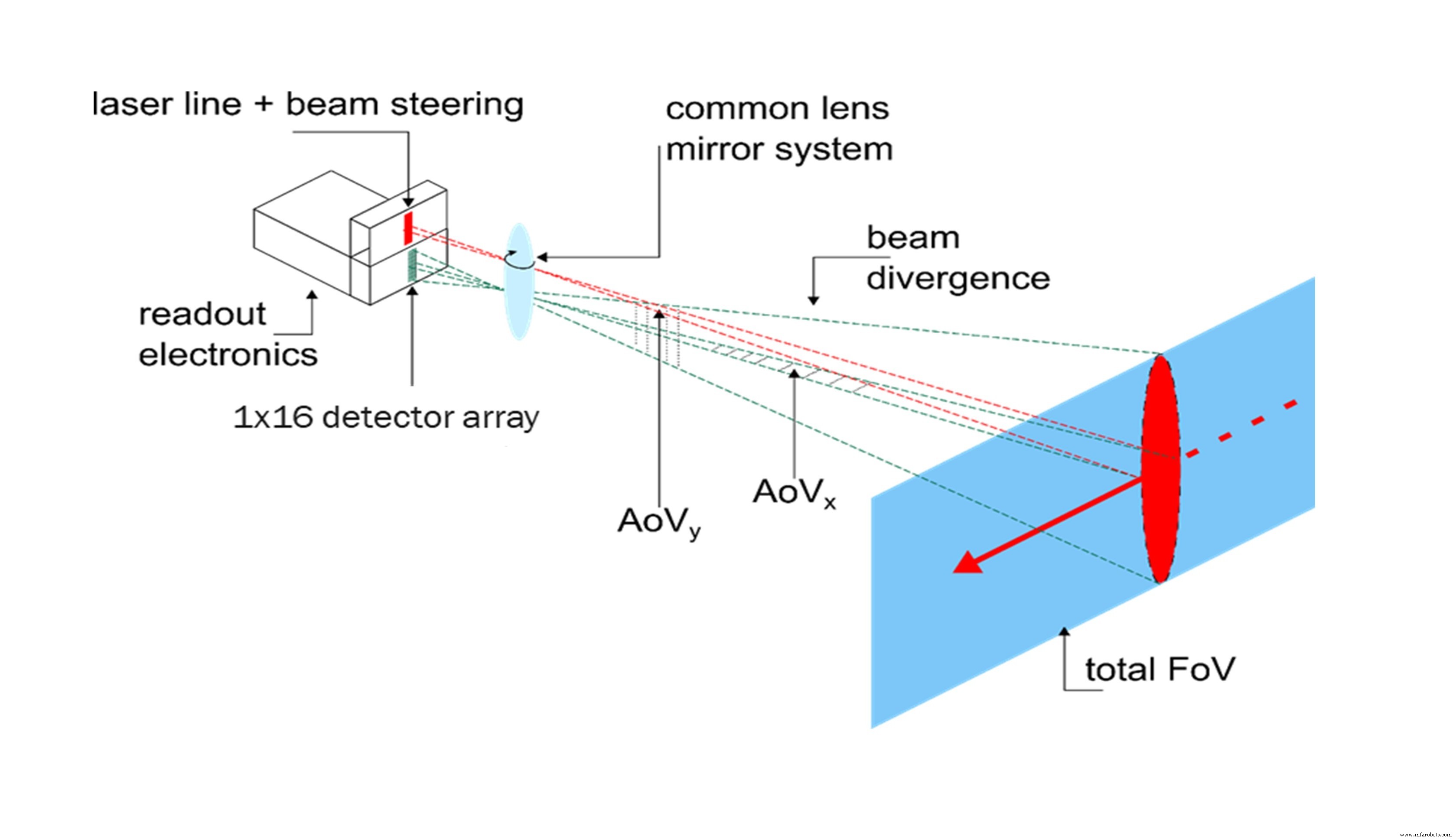
Abbildung 9:Systemmodell für einen dToF-LiDAR-Sensor.
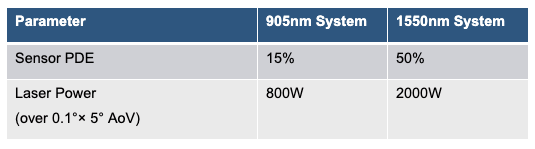
Tabelle 2:LiDAR-Sensor- und Laserparameter für die NIR- und SWIR-Systemmodellsimulation.
Das 1550-nm-System verwendet eine höhere Laserleistung sowie einen höheren PDE-Sensor aufgrund der Verwendung von InGaAs-Legierungen mit hohem PDE, was in unserer Systemsimulation zu einer besseren Reichweitenleistung führen sollte. Unter Verwendung von Parametern auf Systemebene von 100 klux Umgebungslicht, gefiltert durch einen 50 nm Bandpass auf der Sensorlinse (zentriert um 905 nm bzw 1 ns Pulsbreite und einem Linsendurchmesser von 22 mm, die Ergebnisse sind in Abbildung 10 dargestellt.
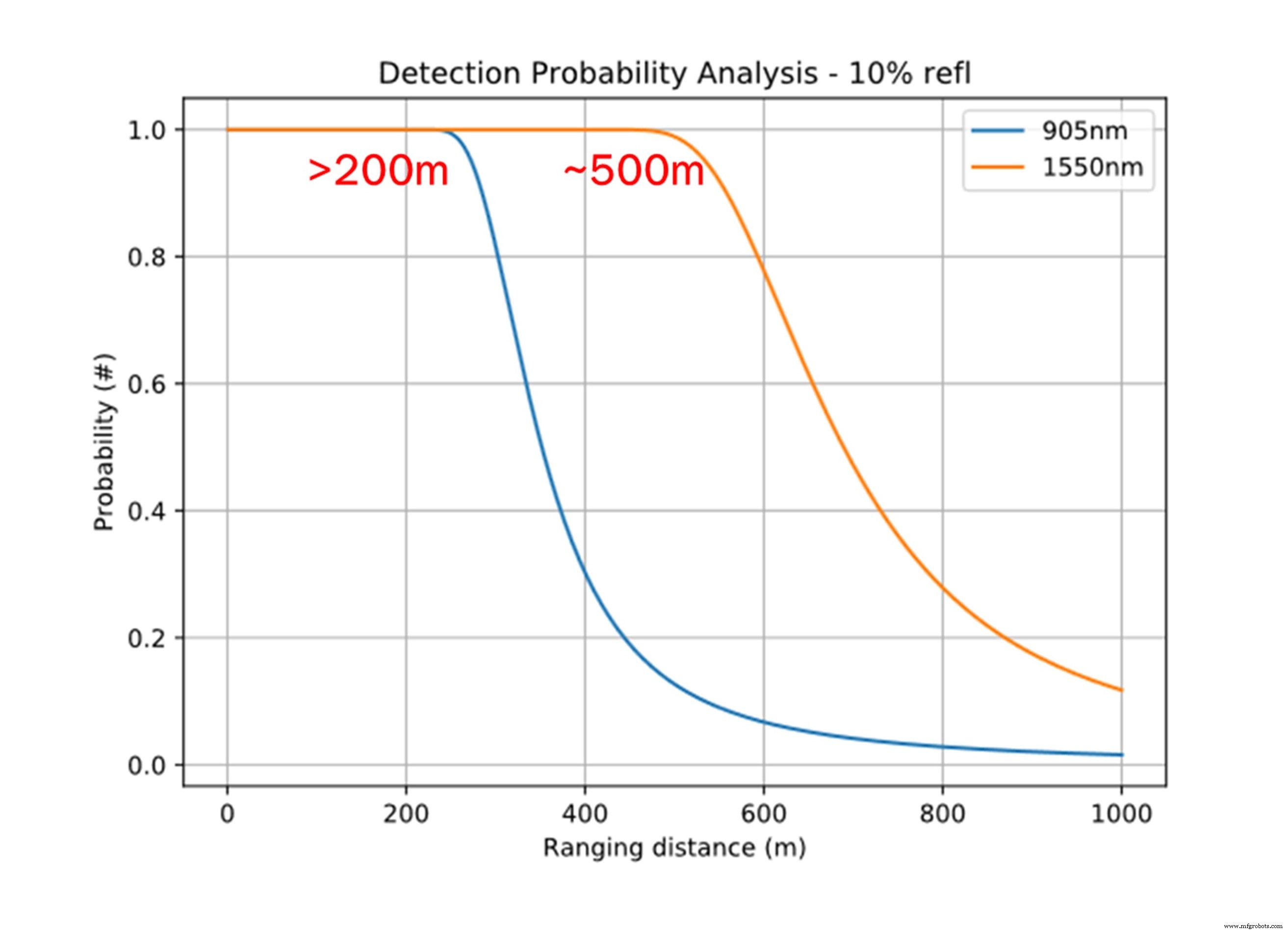
Abbildung 10:Simulationsergebnisse für ähnliche LiDAR-Systeme basierend auf 905 nm und 1550 nm.
Wie erwartet, kann das 1550-nm-System für ein Objekt mit geringem Reflexionsvermögen weiter reichen, bis zu 500 m mit einer Wahrscheinlichkeit von 99%. Das 905-nm-basierte System erreicht jedoch immer noch eine Reichweite von weit über 200 m, was zeigt, dass beide Arten von Systemen unter typischen Umgebungsbedingungen die LiDAR-Anforderungen mit großer Reichweite für Automobile erfüllen können. Wenn schlechte Umgebungsbedingungen wie Regen oder Nebel auftreten, führen die Wasserabsorptionseigenschaften von SWIR-Licht dazu, dass sich seine Leistung schneller verschlechtert als bei einem NIR-basierten System, was ein weiterer zu berücksichtigender Faktor ist.
Kostenüberlegungen
Nachdem wir uns eingehend mit der Technologie hinter LiDAR-Systemen sowie den Auswirkungen der Verwendung unterschiedlicher Wellenlängen befasst haben, kommen wir nun zurück auf den Kostenfaktor. Wir haben bereits erklärt, dass die Sensoren für NIR-basierte LiDARs aus nativen CMOS-Silizium-Gießereiprozessen stammen, die die niedrigstmöglichen Kosten für Halbleiter ermöglichen. Darüber hinaus ermöglichen sie auch die Integration der CMOS-Ausleselogik mit dem Sensor auf einem Chip durch Verwendung der Stacked-Die-Technologie, die heute in Gießereien leicht verfügbar ist, wodurch die Signalkette weiter verkürzt und die Kosten gesenkt werden. Umgekehrt verwenden SWIR-Sensoren III/V-Halbleitergießereien wie InGaAs, die teurer sind, und eine neue hybride Ge-Si-Technologie – die möglicherweise kostengünstigere SWIR-Sensoren ermöglicht – was die Integration in die Ausleselogik einfacher macht, aber immer noch mehr als 5x teurer ist als herkömmliches CMOS-Silizium auch nach Erreichen der Reife. Auf der Laserseite führt der Unterschied in der Wafergröße zwischen den GaAs-Wafern, die zur Herstellung der Laserchips in NIR-Systemen verwendet werden, gegenüber den InGaAs-Wafern, die zur Herstellung der Laserchips in SWIR-Systemen verwendet werden, erneut zu einem Kostenunterschied und der Tatsache, dass NIR-Systeme Ein Weg zur Verwendung von VCSELs mit einer viel leichter verfügbaren Lieferantenbasis ermöglicht auch eine kostengünstigere Integration.
Die Summe der oben genannten Faktoren führte zu einer Analyse von IHS Markit (Amsrud, 2019), die zeigte, dass die Kosten für ein SWIR-System für den gleichen Komponententyp (Sensor oder Laser) 10 bis 100 Mal höher wären als ein NIR-System. Die durchschnittlichen kombinierten Komponentenkosten für Sensor und Laser für ein NIR-System wurden im Jahr 2019 auf 4 bis 20 USD pro Kanal geschätzt und bis 2025 auf 2 bis 10 USD sinken. Im Gegensatz dazu wurden die entsprechenden durchschnittlichen Komponentenkosten für ein SWIR-System auf geschätzt 275 USD pro Kanal im Jahr 2019 betragen und bis 2025 auf 155 USD pro Kanal sinken. Das ist ein enormer Kostenunterschied, wenn man bedenkt, dass LiDAR-Systeme mehrere Kanäle enthalten, selbst wenn ein 1D-Scan-Ansatz verwendet wird, da ein vertikales Array von Einzelpunktkanälen immer noch vorhanden ist erforderlich.
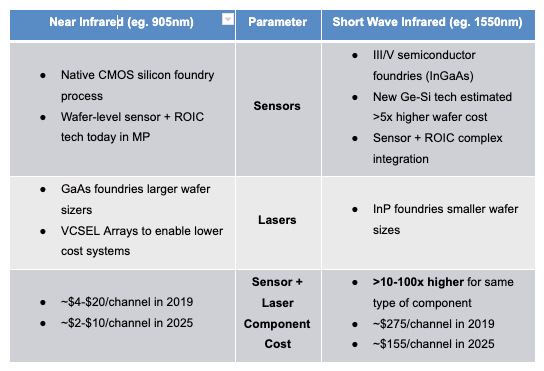
Tabelle 3:Zusammenfassung der Kostenüberlegungen. (Bildquelle:IHS Markit)
Auch die Dynamik des LiDAR-Marktes begünstigt das SWIR-Lager nicht. Der Markt für autonomes Fahren hat sich nicht so schnell entwickelt wie die Markterwartungen vor fünf Jahren, und Level-4- und Level-5-Autonomiesysteme, für die LiDAR ein Muss ist, sind noch Jahre von einem breiten Masseneinsatz entfernt. Inzwischen sind die LiDAR-verwendenden Industrie- und Robotikmärkte noch kostenbewusster und benötigen die ultra-hochleistungsfähigen Vorteile eines SWIR-Systems nicht, sodass diese Hersteller zwischenzeitlich keine Möglichkeit haben, Komponenten auf den Markt zu bringen Kostensenkung durch Volumensteigerung, wie oft behauptet wird. Es gibt ein „Henne-und-Ei“-Problem, bei dem die niedrigeren Kosten bei steigendem Volumen erzielt werden, aber die niedrigeren Kosten benötigt werden, um die Mengen zu erhalten.
Zusammenfassung
Nachdem wir uns eingehend mit der Technologie und den Unterschieden zwischen NIR- und SWIR-Systemen befasst haben, ist klar, warum die überwiegende Mehrheit der heute existierenden LiDAR-Systeme NIR-Wellenlängen verwendet. Obwohl die Aussichten für die Zukunft nie zu 100 % sicher sind, ist es offensichtlich, dass die Kosten und die Verfügbarkeit von Ökosystemlieferanten Schlüsselfaktoren sind und NIR-basierte Systeme aufgrund des Technologievorteils und der Skaleneffekte für CMOS-Silizium sicherlich immer billiger sein werden. Und während SWIR ein LiDAR-System mit größerer Reichweite ermöglicht, können NIR-basierte LiDARs auch die gewünschten Automobil-Langstreckenanforderungen erfüllen und gleichzeitig eine hervorragende Leistung für Konfigurationen mit kurzer bis mittlerer Reichweite erbringen, die auch in ADAS und AD benötigt werden. Die Existenz von NIR-basierten LiDARs in der Massenproduktion für den Automobilmarkt heute zeigt, dass die Technologie kommerzialisiert und erprobt wurde, aber es wird noch einige Zeit dauern, bis eine Konsolidierung stattfindet und sich die Gewinner und Verlierer herauskristallisieren. Immerhin gab es in der Automobilindustrie um die Jahrhundertwende 30 verschiedene Hersteller, in den nächsten zehn Jahren waren es fast 500 – aber es dauerte nur wenige Jahre, bis die meisten von ihnen verschwanden. Es wird erwartet, dass bis Ende dieses Jahrzehnts eine ähnliche Dynamik bei den LiDAR-Herstellern eintreten wird.
Referenzen
Yole Entwicklung (2020). LiDAR für Automobil- und Industrieanwendungen – Markt- und Technologiebericht 2020
Amsrud, P. (2019, 25. September). Der Wettlauf um ein kostengünstiges LIDAR-System [Konferenzpräsentation] . Automobil-LIDAR 2019, Detroit, MI, Vereinigte Staaten. IHS Markit.
— Bahman Hadji, Director of Business Development, Automotive Sensoring Division, ON Semiconductor
>> Dieser Artikel wurde ursprünglich auf unserer Schwesterseite EE veröffentlicht Zeiten.
Verwandte Inhalte:
- ADAS-Experten erwägen Sensorintegration in zukünftige Fahrzeuge
- Smart Cities:Argumente für Lidar in intelligenten Verkehrssystemen
- Was treibt den Wandel bei Automobilelektroniksystemen an?
- Time-of-Flight-Technologie verspricht verbesserte Genauigkeit
- Warum FIR-Sensortechnologie für die Verwirklichung vollständig autonomer Fahrzeuge unerlässlich ist
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Sensor
- Hall-Sensor zielt auf sicherheitskritische Automobilsysteme ab
- Entwerfen von Open-Source-Smart-Farming-Systemen
- Sensoren verstehen
- Bimodale „elektronische Haut“
- Laufzeit im Vergleich zu FMCW-LiDAR-Systemen
- Sensorfolie für die Luft- und Raumfahrt
- Miniatur-Lunge-Herz-Sensor auf einem Chip
- Festkörper-Kohlendioxidsensor
- Kohlenstoffbasierter Luftqualitätssensor
- Autonome Sensortechnologie für Echtzeit-Feedback über Kühlung und Heizung