Arduino Repulsive Electromagnetic Levitation
Komponenten und Verbrauchsmaterialien
 | | × | 1 | |
 | | × | 1 | |
| | × | 1 | |
| | Linearer Hall-Effekt-Sensor UGN3503 |
| × | 1 | |
| | | RobotGeek Medium Solenoid |
| × | 1 | |
| | Großer Lautsprechermagnet |
| × | 1 | |
Über dieses Projekt
Vor ein paar Jahren versuchte ich, ein Gerät für die abstoßende Magnetschwebebahn zu bauen, aber alle Schaltungen, die ich hatte, waren komplex und die Einstellung war sehr schwierig.
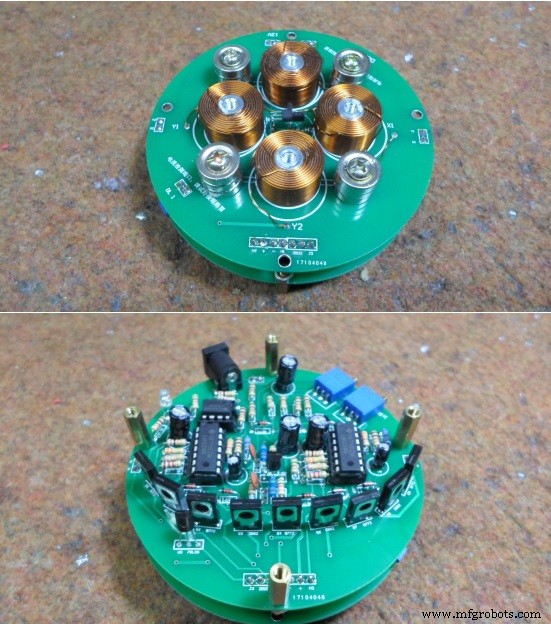
Nach mehreren erfolglosen und halberfolgreichen Versuchen habe ich mir den Levitator gekauft, den Sie auf dem Bild sehen können, aber es ist fast unmöglich, ihn zu Hause (DIY) zu machen.
Jetzt präsentiere ich euch einen abstoßenden Levitator, der neben dem Arduino-Board nur wenige zusätzliche Komponenten enthält und sehr einfach zum Selbermachen ist:
- Jeder mittlere Leistungstransistor:in meinem Fall BD241
- Universaldiode 1N4001
- Widerstand 1 Kohm
- UGN3503 Hall-Effekt-Sensor (Sie können jeden 5V RATIOMETRIC Hall-Effekt-Sensor verwenden)
- Torus-Magnet aus einem alten Lautsprecher (mit einem Durchmesser von 9cm bis 11cm und mehr).
- Anstelle eines großen Torus-Magneten können auch Gruppen kleiner Neodym-Magnete als regelmäßiges Sechseck verwendet werden, wie in kommerziellen Geräten.
- Solenoid bestehend aus ca. 200 Wicklungen isoliertem Kupferdraht 30AWG. In diesem Fall habe ich ein Magnetventil verwendet, das aus der alten Kassenschublade entfernt wurde.
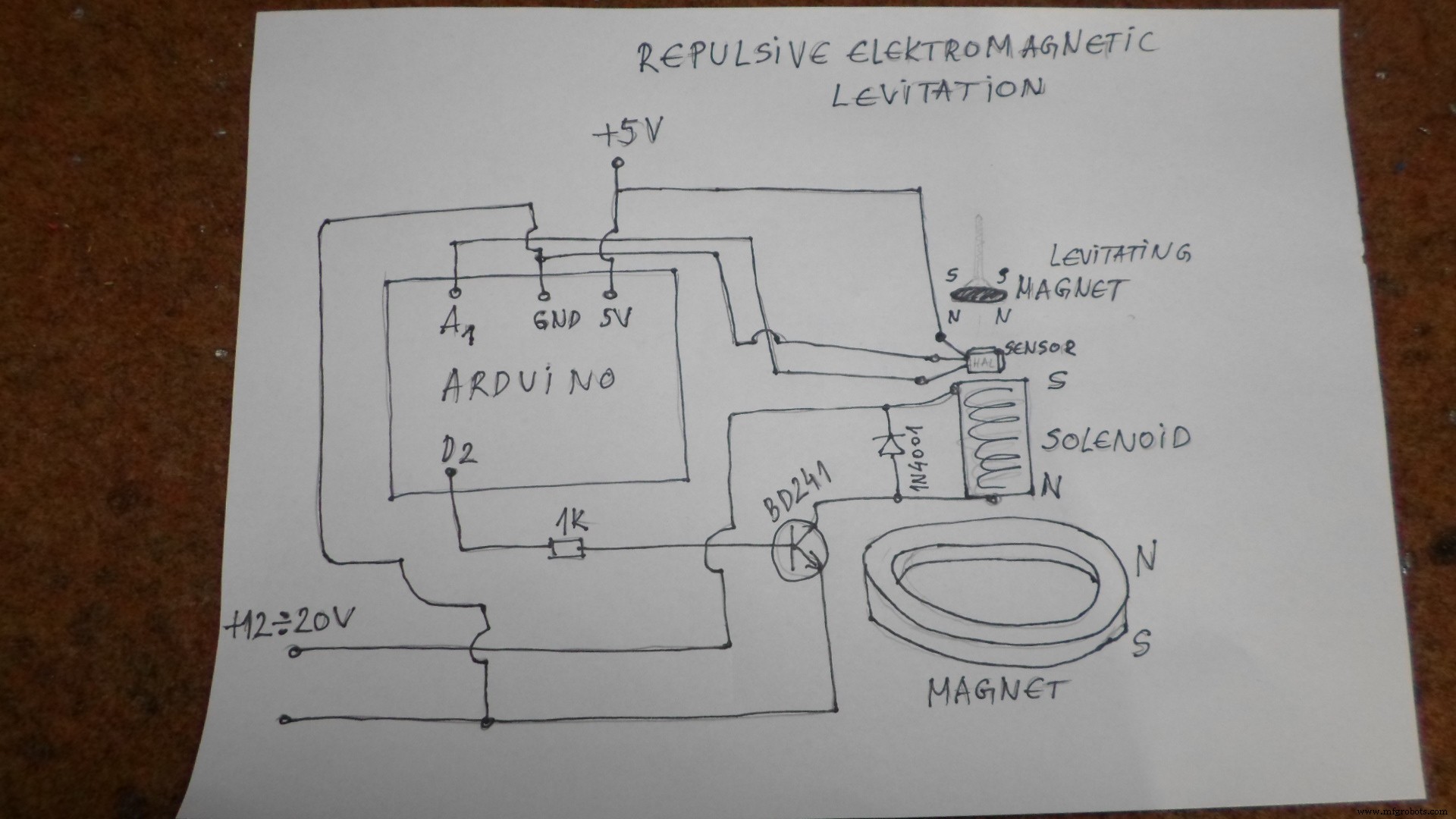
Die Schaltung ist sehr einfach und wird unten im Bild dargestellt. Arduino wird standardmäßig mit 5V und Magnetspule über Transistor mit 12V-20V betrieben. Beide haben eine gemeinsame Masse. Die Polarität von Magneten und Magnetspule ist in der Abbildung dargestellt. Zum Einstellen braucht man etwas Geduld und Zeit, und tatsächlich gibt es die Freude an der Herstellung eines Geräts. Der Hal-Sensor sollte sich oben über dem Magneten befinden. Darüber befindet sich der Magnet, der schweben sollte. In meinem Fall war die Einstellung, den Torus-Magneten nach oben und unten zu bewegen ist auch eine Einstellung im Code durch Ändern des Wertes der ersten Zeile im Code und kann von 200 bis 350 reichen. Mit einer Kombination dieser beiden Einstellungen erzielen wir die besten Ergebnisse.
Code
Unbenannte DateiArduino
int set_point =250; // settingsint sensorPin =A1;int output_pin =2;int sensorValue =0;void setup () { Serial.begin (9600); pinMode (output_pin, OUTPUT);}void loop () { sensorValue =analogRead (sensorPin); // Serial.println (sensorValue); if (sensorValue <=set_point) digitalWrite (output_pin, LOW); sonst digitalWrite (output_pin, HIGH); } Schaltpläne