


LVDT-Demodulation:Gleichrichtertyp vs. synchrone Demodulation
Erfahren Sie, wie sich zwei Demodulationsmethoden vergleichen lassen:synchrone Demodulation und Demodulation vom Gleichrichtertyp. Hier besprechen wir die Vor- und Nachteile jeder Methode und die entsprechenden Anwendungen.
In einem früheren Artikel haben wir den Betrieb und die Herausforderungen eines Diodengleichrichterdemodulators diskutiert. In diesem Artikel werden wir zunächst die Einschränkungen der Demodulatoren vom Gleichrichtertyp im Allgemeinen betrachten. Dann werden wir sehen, dass ein synchroner Demodulator einige dieser Probleme lösen kann. Schließlich werden wir uns die Nachteile der synchronen Demodulation in LVDT-Anwendungen ansehen.
Einschränkungen von Demodulatoren vom Gleichrichtertyp
Obwohl ein Präzisionsgleichrichter die Herausforderungen eines einfachen Diodengleichrichters lösen kann, haben Demodulatoren vom Gleichrichtertyp im Allgemeinen mehrere Nachteile. Bei einem Demodulator vom Gleichrichtertyp benötigen wir Zugang zum Mittelabgriff der LVDT-Sekundärwicklung, um die Spannung an jeder der Sekundärwicklungen gleichzurichten. Daher ist diese Art der Demodulation nur auf 5-Draht-LVDTs anwendbar (Abbildung 1(b)).
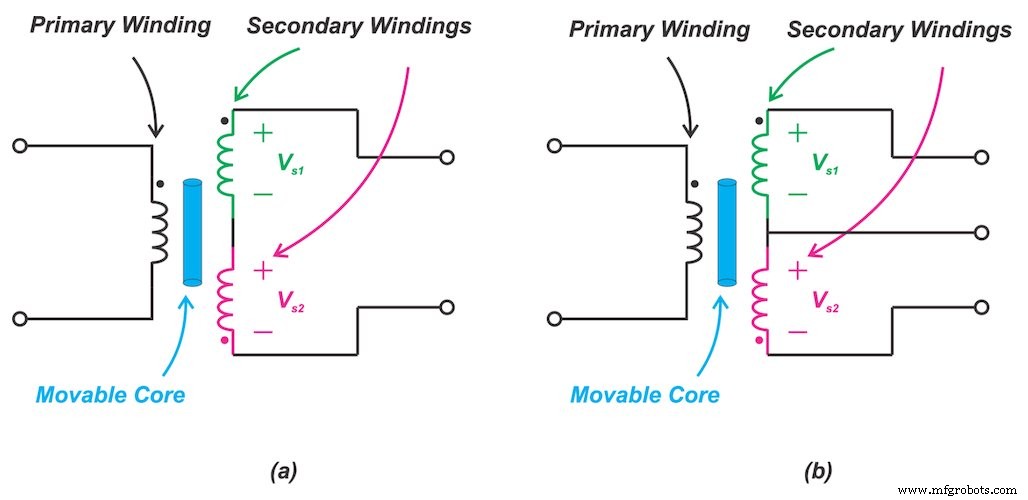
Abbildung 1. (a) 4-Draht und (b) 5-Draht-LVDTs.
Es gibt andere Demodulationsverfahren, die keinen Zugriff auf den Mittelabgriff benötigen und die Kernposition durch Verarbeitung der Spannungsdifferenz zwischen den beiden Sekundärteilen bestimmen können. Diese Demodulatoren ermöglichen es uns, einen 4-Draht-LVDT zu verwenden, wie in Abbildung 1(a) dargestellt.
Ist es wirklich wichtig, die Mindestanzahl an elektrischen Anschlüssen zu haben?
Es gibt viele Anwendungen, bei denen sich die Konditionierungsschaltung in großer Entfernung vom Sensor befindet. Ein gutes Beispiel sind Messungen in rauen Umgebungen radioaktiver Anwendungen, bei denen die Konditionierungsschaltungen in sicheren Bereichen platziert werden sollten, sogar bis zu mehreren hundert Metern vom LVDT entfernt. In diesen Fällen kann es schwierig sein, die beiden Sekundärspannungen über eine lange Distanz über eine 5-Leiter-Konfiguration zu übertragen. Wenn das Konditionierungsmodul vom LVDT entfernt angeordnet ist, ist eine ausgewogene Verdrahtung mit geringer verteilter Kapazität erforderlich. Dies bedeutet einen erheblichen Anstieg der Verkabelungskosten.
Ein weiterer Nachteil eines Demodulators vom Gleichrichtertyp ist seine begrenzte Rauschunterdrückung. Betrachten Sie einen LVDT-Sensor, bei dem die Kernverschiebung einer sinusförmigen Wellenform bei 250 Hz folgt. Die rote Kurve in Abbildung 2 zeigt den demodulierten Ausgang dieses LVDT, der mit einem typischen Diodengleichrichter erhalten wurde.
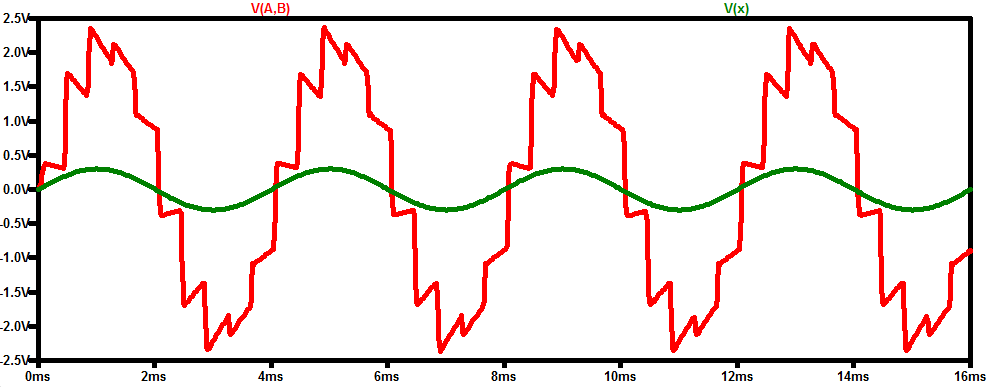
Abbildung 2.
In dieser Abbildung zeigt die grüne Kurve die Kernverschiebung x. Wie Sie sehen, sieht das Ausgangssignal wie die verstärkte Version von x aus, weist jedoch einige abrupte Änderungen auf, die einigen Hochfrequenzkomponenten entsprechen.
Um diese unerwünschten Hochfrequenzkomponenten zu beseitigen, können wir einen Tiefpassfilter mit einer Grenzfrequenz verwenden, die etwas höher ist als die mechanische Bandbreite des Systems (250 Hz). Daher passieren selbst mit einem idealen Tiefpassfilter alle Frequenzkomponenten bis 250 Hz das Filter ungedämpft. Daher erscheint jede Rauschkomponente unter 250 Hz, die mit dem Sensorausgang gekoppelt ist, auch am Demodulatorausgang.
Ein schlechtes Rauschverhalten ist ein Hauptnachteil der Demodulatoren vom Gleichrichtertyp. Bei langen Kabeln wird diese Einschränkung noch deutlicher. Das Rauschverhalten zusammen mit der 5-Draht-Konfigurationsanforderung machen diese Schaltung für lange Kabelwege zu entfernten Standorten ungeeignet. Die unten diskutierte synchrone Demodulation kann diese beiden Probleme angehen.
Synchrone Demodulation
Betrachten Sie den in Abbildung 3 gezeigten LVDT. Angenommen, wir haben \[V_{EXC} =A_p\cos(2\pi\times f_p\times t)\].
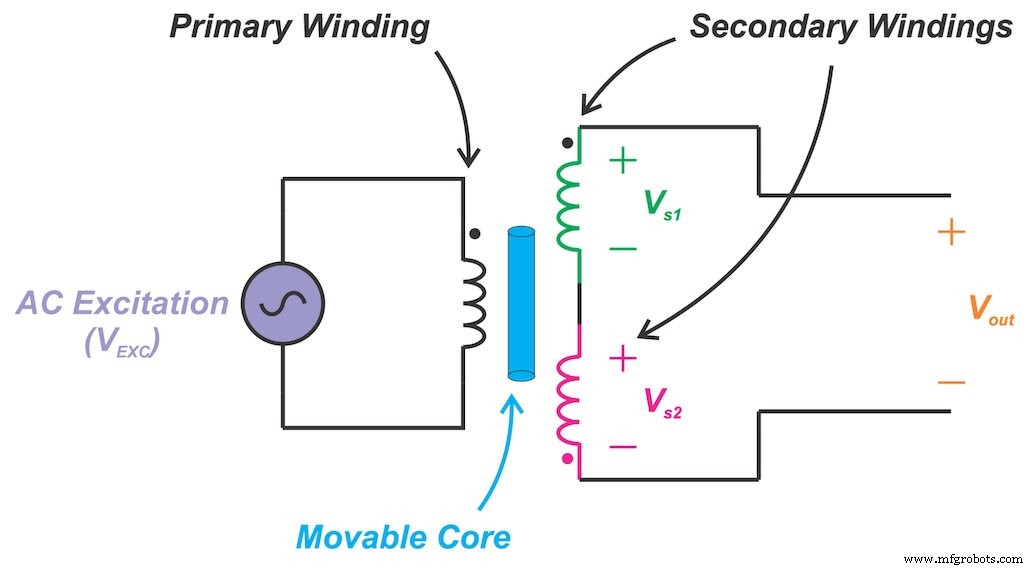
Abbildung 3. Ein Beispiel für LVDT
Der Differenzausgang (\[V_{out}\]) ist ein amplitudenmoduliertes Signal und kann wie folgt ausgedrückt werden:
\[V_{out} =A_s \times x \times \cos(2\pi \times f_p \times t + \phi)\]
Gleichung 1.
wobei x die Kernverschiebung ist und \[A_s\] ein Skalierungsfaktor ist, der die Gesamtausgabeamplitude für ein gegebenes x angibt. Der Phasenterm \[\phi\] ist die durch den LVDT verursachte Phasendifferenz zwischen Primär- und Sekundärspannung. Diese Phasenverschiebung sollte idealerweise sehr klein sein, insbesondere um eine bestimmte vom Hersteller angegebene Frequenz. Diese Phasenverschiebung müssen wir jedoch in der Regel berücksichtigen.
Die synchrone Demodulationstechnik multipliziert die LVDT-Differenzausgabe mit dem Anregungssignal (oder einem mit dem Anregungssignal im Allgemeinen synchronen Signal). Dies ergibt:
\[V_{demod} =V_{out} \times V_{EXC} =A_s \times x \times \cos(2\pi \times f_p \times t + \ phi) \times A_p\cos(2\pi \times f_p \times t)\]
Gleichung 2.
das vereinfacht sich zu:
\[V_{demod} =\frac{1}{2} \times A_s \times x \times A_p [\cos(\phi) + \cos(2\pi \times 2f_p \times t + \phi)]\]
Der erste Term innerhalb der Klammern ist DC, der zweite Term hat jedoch die doppelte Anregungsfrequenz. Daher kann ein schmaler Tiefpassfilter den zweiten Term entfernen und wir haben:
\[V_{gefiltert} =\frac{1}{2} \times A_s \times x \times A_p\cos(\phi)\]
Gleichung 3.
Dies gibt uns eine Gleichspannung proportional zur Kernverschiebung x.
Synchrone Demodulation durch Multiplikation mit einer Rechteckwelle
Wir können einen analogen Multiplikator verwenden, um den LVDT-Ausgang mit der Anregungssinuswelle zu multiplizieren (Gleichung 2); jedoch sind analoge Multiplizierer teuer und haben Linearitätsbeschränkungen. Anstatt mit einer Sinuswelle zu multiplizieren, können wir das Signal synchron mit dem Anregungseingang mit einer Rechteckwelle multiplizieren.
Sie fragen sich vielleicht, wie eine Rechteckwelle anstelle einer Sinuswelle verwendet werden kann? Eine Rechteckwelle, die zwischen ±1 umschaltet, kann als unendliche Summe von Sinuskurven bei den ungeraden Harmonischen der Rechteckwellenfrequenz ausgedrückt werden. Daher kann eine Rechteckwelle der Frequenz \[f_p\] ausgedrückt werden als:
\[v_{squarewave}(t) =\sum_{n=1, 3, 5}^{\infty}\frac{4}{n\pi}\sin (2\pi \times nf_p \times t)\]
Wenn der LVDT-Ausgang (eine Sinuswelle bei \[f_p\]) mit der Rechteckwelle multipliziert wird, wird die Fundamentalkomponente der Rechteckwelle \[(\frac{4}{\pi}\sin(2\pi \times f_p\ mal t))\] erzeugt eine Gleichstromkomponente sowie eine Hochfrequenzkomponente bei \[2f_p\]. Der hochfrequente Anteil wird durch einen Tiefpassfilter wie im vorigen Abschnitt erläutert unterdrückt und der gewünschte DC-Anteil erscheint am Ausgang.
Die Multiplikation mit den Oberwellen höherer Ordnung der Rechteckwelle erzeugt Hochfrequenzkomponenten bei geraden Vielfachen von \[f_p\]. Somit erscheint am Filterausgang nur der Gleichstromanteil, genau wie bei der Multiplikation des Signals mit einer Sinusschwingung. Der Hauptvorteil der Multiplikation mit einer Rechteckwelle besteht darin, dass die Schaltungsimplementierung des Demodulators erheblich vereinfacht werden kann.
Schaltungsimplementierung eines synchronen Demodulators
Der synchrone Demodulator auf Rechteckwellenbasis ist in Abbildung 4 dargestellt.
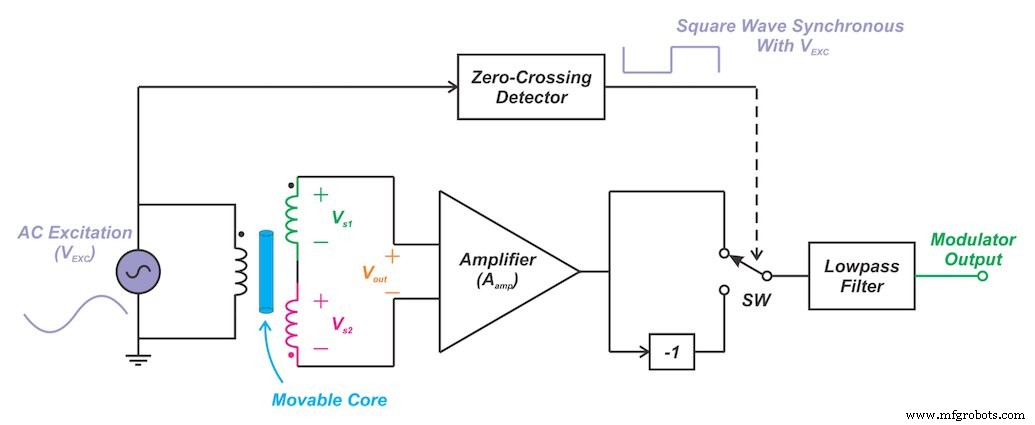
Abbildung 4. Ein synchroner Demodulator auf Rechteckwellenbasis
In diesem Fall wird die verstärkte Version des LVDT-Ausgangs mit einer Rechteckwelle und nicht mit der Anregungssinuswelle multipliziert. Die Rechteckwelle ist synchron mit dem Anregungseingang und wird durch einen „Nulldurchgangsdetektor“ erhalten, wie im obigen Blockschaltbild gezeigt.
Um eine Multiplikation mit einer Rechteckwelle durchzuführen, wird die Verstärkung der Signalkette periodisch zwischen \[±A_{amp}\] geändert (\[A_{amp}\] ist die Verstärkerverstärkung). Beachten Sie, dass der untere Pfad eine Verstärkung von -1 enthält. Dies wird erreicht, indem die Rechteckwelle verwendet wird, um den Schalter SW anzusteuern, der den Signalpfad zwischen dem oberen und dem unteren Pfad ändert. Dies entspricht effektiv der Multiplikation des Verstärkerausgangs mit der Rechteckwelle.
Schließlich wird ein Tiefpassfilter verwendet, um den DC-Anteil des Ausgangs beizubehalten und die Hochfrequenzkomponenten zu unterdrücken.
Die Vorteile der LVDT-Synchrondemodulatoren
Der Hauptvorteil der synchronen Demodulation ist ihr Rauschverhalten. Wie oben besprochen, verschiebt die synchrone Demodulationsfrequenz den LVDT-Ausgang zu DC und verwendet einen Tiefpassfilter, um diese DC-Komponente beizubehalten. Der Tiefpassfilter unterdrückt alle Rauschkomponenten außerhalb seines Durchlassbereichs.
Da unser gewünschtes Signal bei DC liegt, können wir einen schmalen Tiefpassfilter verwenden. Dies begrenzt die Systembandbreite und ermöglicht es dem Demodulator, einen großen Teil des Rauschens, das an den LVDT-Ausgang koppelt, deutlich zu unterdrücken. Darüber hinaus können wir bei synchroner Demodulation einen 4-Draht-LVDT verwenden.
Die Nachteile der LVDT-Synchrondemodulatoren
Obwohl die synchrone Demodulation im Vergleich zu den Demodulatoren vom Gleichrichtertyp eine höhere Rauschimmunität bieten kann, hängt ihre Ausgabe von der Amplitude der Erregerspannung (\[A_p\] in Gleichung 3) ab. Daher ist bei synchroner Demodulation die Amplitudenstabilität des Anregungseingangs kritisch.
Ein weiteres Problem besteht darin, dass die Demodulatorausgabe von der Phasenverschiebung der LVDT-Übertragungsfunktion (\[\cos(\phi)\] in Gleichung 3) abhängt. Diese Phasenverschiebung sollte idealerweise sehr klein sein; sie ist jedoch nicht konstant und kann sich mit dem Arbeitspunkt ändern. Praktische Demodulatorschaltungen verwenden gewöhnlich ein Phasenkompensationsnetzwerk, um die Phase der erzeugten Rechteckwelle einzustellen. Das Kompensationsnetzwerk kann die Komplexität des Demodulators erhöhen.
Diese erhöhte Komplexität macht die Schaltung jedoch im Vergleich zu den Demodulatoren vom Gleichrichtertyp für relativ längere Kabel geeignet. Dies liegt daran, dass der Phasenverschiebungsterm \[\phi\] verwendet werden kann, um die durch die Verdrahtung verursachte Verzögerung zu berücksichtigen. Daher kann die Phasenkompensationsschaltung auch verwendet werden, um die Kabelverzögerung zu kompensieren und die Schaltung für längere Drähte geeignet zu machen.
Andere Demodulationstechniken
Die synchrone Demodulation bietet eine höhere Störfestigkeit und erfordert nur vier elektrische Verbindungen; es hat jedoch seine eigenen Einschränkungen, wie die Abhängigkeit von der Amplitude des Anregungseingangs sowie das Problem der Phasenverschiebung. Um diese Probleme anzugehen, gibt es mehrere andere Demodulationstechniken. Diese Techniken verwenden normalerweise ratiometrische Messkonzepte und DSP-basierte Verfahren, um die Beschränkung von synchronen Demodulatoren zu umgehen.
Eine ausführlichere Diskussion der synchronen Demodulation bei Anwendung auf andere Sensortypen finden Sie in den folgenden Artikeln:
- Einführung in die synchrone Demodulation
- Synchrone Demodulation mit analogen Multiplikatoren im Vergleich zu schalterbasierten Multiplikatoren
- Analoge und digitale Implementierung eines synchronen Demodulators
Eine vollständige Liste meiner Artikel finden Sie auf dieser Seite.
Internet der Dinge-Technologie
- Open DDS vs. RTI DDS-Software
- In den autonomen Fahrzeugen von morgen:Vom Proof of Concept zur Realität
- DDS-Sicherheit auf die Hardware-Weise - SGX Teil 3:Gehärtete DDS-Dienste
- DDS-Sicherheit auf die Hardware-Weise - SGX:Teil 2 (Micro + Security + SCONE)
- DDS-Sicherheit auf die Hardware-Weise - SGX:Teil 1 (Übersicht)
- MQTT und DDS:Machine-to-Machine-Kommunikation im IoT
- Was ist IIoT? Die Einführung in das industrielle Internet der Dinge
- Softwaretests bei RTI
- Telegraf-Plugin für Connext DDS:Erstellen Sie ein Zeitreihen-Überwachungssystem mit DDS und InfluxDB
- CNC-Drehmaschinen mit Synchronspindeltechnologie