


Blind Stick Navigator
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
| |||
|
Über dieses Projekt
Die Geschichte begann, als ich einen blinden Menschen sah, der sich bemühte, mit seinem traditionellen Blindenstock Hindernisse wie Straßenlöcher, Treppen usw. zu überwinden. Es regt mich wirklich dazu an, diesen Prototyp zu bauen, obwohl ich nicht erfahren genug im Umgang mit elektronischen Geräten bin. Durch die Verwendung verschiedener Quellen im Internet habe ich es letztes Jahr während meines Abschlussprojekts geschafft. Abgesehen davon verbessere ich den Prototyp auch, indem ich GPS-Standort hinzufüge. Dank 1Sheeld hilft es mir wirklich, diesen Prototyp innerhalb von 6 Monaten fertigzustellen.
Schritt 1
Um den Blind Stick Navigator einzuschalten, muss er extern mit Strom versorgt werden. Ich verwende eine 9-V-Batterie als Einführung, wie sie ausgeschaltet werden kann. Von dem, was ich gesehen habe, hatte mein Prototyp den Nachteil, einen langfristigen Stromverbrauch bereitzustellen. Daher braucht es irgendwie eine Verbesserung wie Solarpanel / Strom.
Schritt 2
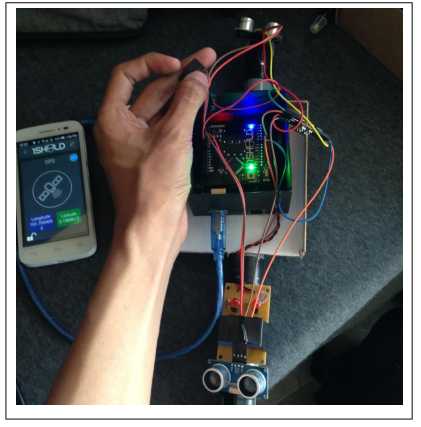
Nach dem Einschalten mit dem Akku, der mit dem USB-Netzteil am Mikrocontroller Arduino Uno verbunden ist, muss der Wächter immer die Bluetooth-Verbindung (Android-Smartphone) mit dem Mikrocontroller verbinden lassen. Anschließend müssen Sie die bereits auf dem Smartphone installierten 1Sheeld-Apps öffnen und die GPS- und SMS-Funktionen aktivieren.
**Ja, ich weiß, blinde Menschen können das Smartphone nicht sehen und darauf zugreifen, aber wenn ich oder Sie es schaffen, die Modifikation am Android-Smartphone vorzunehmen, wird es viel einfacher. Ich habe bereits mein Bestes versucht, ein besseres Smartphone zu finden, das eine Braille-Taste bietet, aber ich bin gescheitert. Daher hoffe ich, dass es in Zukunft ein Upgrade für meinen Prototypen geben wird.
Schritt 3
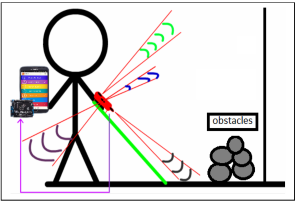
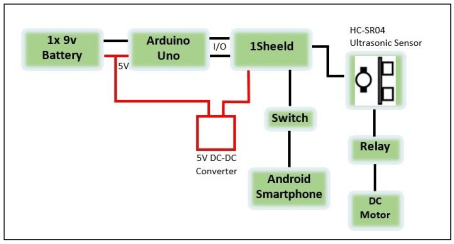
Basierend auf dem obigen Blockdiagramm, wie Sie sehen können, erfolgt die Verbindung zwischen den Geräten auf diese Weise. Nachdem diese beiden eingeschaltet wurden, können Blinde den Blind Stick Navigator verwenden. Basierend auf der Beobachtung am traditionellen weißen Stock werden die Blinden immer um den Blindstock schwingen, um eine Bestätigung über ihre Umgebung zu erhalten. Aber mit Blind Stick Navigator hilft es ihnen, eine Vibrationsbenachrichtigung über das Hindernis in der mittleren und unteren Sichtweite zu erhalten. Das mit dem Ultraschallsensor HC-SR04 erkannte Hindernis. Es wurde oben am Stick und unten am Stick befestigt. Ich verwende PVC-Rohr, weil ich den vibrierenden Gleichstrommotor in das PVC-Rohr stecken kann. Der Vibrationsmodus kann im angegebenen Code mit der Arduino IDE-Software geändert werden.
Schritt 4
Darüber hinaus kann der Blind Stick Navigator den Längen- und Breitengrad des Standorts blinder Personen anzeigen. Dies liegt daran, dass das Smartphone als Anbieter fungiert und die GPS-Position für diesen Vorgang bereitstellt. Der Kippschalter ist ein Add-up, um den blinden Menschen das Klicken auf den Notrufknopf zu erleichtern, um den Empfänger darüber zu informieren, dass er / sie bereits verloren oder in Gefahr ist. Wenn Sie es ein- oder mehrmals anklicken, sendet das Smartphone eine Nachricht, dass Sie Hilfe benötigen und suchen Sie ihn anhand des GPS- und Google Map-Links. Die Nummer des Empfängers kann eingestellt werden, ob die Nachricht nur an die Behörde oder den Vormund der Blinden gesendet werden soll. Die Länge des Stockes ist je nach Körpergröße des Benutzers einstellbar. Für diesen Prototyp verwende ich eine bestimmte Länge und die Länge der Erkennung kann im Code geändert werden.
Schritt 5
Zu guter Letzt hoffe ich, dass mein Prototyp weltweit verwendet wird oder kommerzialisiert wird und so blinden Menschen auf ihrer Reise / ihrem Leben hilft. Außerdem tut mir meine Grammatik wirklich leid, weil mein Englisch nicht ganz gut ist. Mehr kann ich in diesem Beitrag nicht beschreiben. Alle Informationen habe ich bereits im Anhang zusammengestellt. Sie können mehr über dieses Projekt auf der Grundlage des unten angegebenen Links beziehen.
Dokument des Projekts :
- FYP 1
- FYP 2
Poster des Projekts :
- FYP 1
- FYP 2
Video des Projekts:
- Video 1
- Video 2
Code
- OneSheeldBlindStickNavigator
OneSheeldBlindStickNavigatorC/C++
#define CUSTOM_SETTINGS#define INCLUDE_GPS_SHIELD#define INCLUDE_SMS_SHIELD/* 1Sheeld-Bibliothek einschließen.*/#include#include #define trigPinL 4#define echodefinL 5#define 7 #define Vib1 12#define Vib2 13#define SW 8/* Definiere ein boolesches Flag. */boolean isInRange =false;float lat;float lon;String PhoneNumber ="0134087286";String Message;String Message1;String Message2;char latitude[10];char longitude[10];void setup() { pinMode(trigPinL, AUSGANG); pinMode (echoPinL, EINGANG); pinMode (trigPinH, AUSGANG); pinMode (echoPinH, EINGANG); pinMode (Vib1, AUSGANG); pinMode (Vib2, AUSGANG); PinMode (SW, EINGANG); /* Kommunikation starten.*/ OneSheeld.begin(); // Serial.begin (9600);}void loop () { lange DauerL, DistanceL, DauerH, DistanceH, MixDist; digitalWrite (trigPinL, LOW); // Diese Zeile hinzugefügt delayMicroseconds(2); // Diese Zeile hinzugefügt digitalWrite (trigPinL, HIGH); VerzögerungMikrosekunden(10); // Diese Zeile hinzugefügt digitalWrite (trigPinL, LOW); DauerL =pulseIn(echoPinL, HIGH); AbstandL =(DauerL/2) / 29,1; digitalWrite (trigPinH, LOW); // Diese Zeile hinzugefügt delayMicroseconds(2); // Diese Zeile hinzugefügt digitalWrite (trigPinH, HIGH); VerzögerungMikrosekunden(10); // Diese Zeile hinzugefügt digitalWrite (trigPinH, LOW); DauerH =pulseIn(echoPinH, HIGH); AbstandH =(DauerH/2) / 29,1; // Serial.println (AbstandL); // Serial.println (Abstand H); // Verzögerung (1000); wenn (Abstand L> 40) { DigitalWrite (Vib1, HIGH); aufrechtzuerhalten. Wenn (Abstand L <40) { DigitalWrite (Vib1, LOW); aufrechtzuerhalten. Wenn (Abstand H <100) { DigitalWrite (Vib1, HIGH); Verzögerung (200); digitalWrite (Vib1, LOW); Verzögerung (200); } /* Überprüfen Sie immer, ob das GPS des Smartphones und ein bestimmter Längen- und Breitengrad in einer Reichweite von 100 Metern liegen. */ //if(GPS.isInRange(30.0831008,31.3242943,100)) // { // if(!isInRange) // { /* SMS senden. */ lat =GPS.getLatitude(); lon =GPS.getLongitude(); Nachricht1 =String(lat,8); Message2 =String(lon,8); if (digitalRead(SW) ==0){ Nachricht ="Ich brauche Hilfe! Ich bin auf Breitengrad:" + Nachricht1 + " und Längengrad:" + Nachricht2; Nachricht ="Google Maps - https://www.google.co.in/maps/place/" + Nachricht1 + "," + Nachricht2; SMS.send (Telefonnummer, Nachricht); Verzögerung (3000); } // isInRange =true; // } // } // else // { // if(isInRange) // { /* SMS senden. */ // SMS.send("+601123413946","Smartphone ist nicht in Reichweite."); // isInRange =false; // } // } Verzögerung(1000);}
Schaltpläne
OneSheeldTONGKAT.fzzHerstellungsprozess
- TinyML-Spracherkennung basierend auf Edge Impulse &Arduino
- Arduino-Gyroskop-Spiel mit MPU-6050
- Arduino Digital Dice
- DIY 37 LED-Roulette-Spiel
- ATtiny85 Mini Arcade:Schlange
- Tragbarer Reichweitendetektor
- Arduino Audio Reactive Desk Light
- Smart Face Tracking Roboterauto
- Galvanisieren mit Kupfer
- NeoMatrix Arduino Pong