


Mini-Aufzug
Komponenten und Verbrauchsmaterialien
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
Dies ist ein funktionierender 5-stöckiger Aufzug. Es ist 3 Meter hoch. Wir haben viel Arbeit hineingesteckt.
Kommen wir zur Sache … so funktioniert's!
Quicklinks:
- Code
- Schaltplan (demnächst)
Inspiration
Wir spielen seit einigen Jahren mit Arduino und Embedded Processing/IoT, aber die meisten Projekte, die wir durchgeführt haben (und die meisten, die wir gesehen haben), sind ziemlich einfach. Wir haben schon lange nach etwas „Echter“ gesucht.
Diesen Sommer war ich bei einem tollen Sommercamp, Project Ember. Es liegt in der San Francisco Bay Area und es ist fantastisch! Kinder entwerfen und bauen große Holzkonstruktionen mit Elektrowerkzeugen. Als ich wusste, dass ich das kann, wollte ich das physische Gebäude mit Arduino kombinieren und das ist das Ergebnis!
Ansatz
Der schwierigste Teil, dies herauszufinden, war die Motor- und Bodenerkennungstechnik. Ein echter Aufzug verwendet wahrscheinlich einen riesigen A / C-Motor mit Sensoren an jeder Etage. Wir könnten diesen Ansatz sicherlich mit einem kleineren Maßstab verwenden, aber das Anbringen von Sensoren in jedem Stockwerk ist mit viel Verkabelungsaufwand verbunden und wir hätten Bedenken hinsichtlich der Empfindlichkeit und Ausrichtung usw. Andererseits kann ein Schrittmotor präzise positioniert werden … aber wir müssten genau wissen, wo wir sind und wie weit wir dafür gehen müssen.
Glücklicherweise haben wir etwas Ähnliches in unserem früheren „Fancy Calendar“-Projekt gemacht. Dort hatten wir herausgefunden, wie man Schrittmotoren verwendet und interessanter, ihre Positionen in einem nichtflüchtigen Speicher (EEPROM auf dem Arduino) zu speichern. Daher verwenden wir hier den gleichen Ansatz. Auf diese Weise benötigen wir überhaupt keine Positionssensoren, wir verlassen uns einfach darauf, dass wir die Anzahl der Schritte zählen können, die wir mit unserem Schrittmotor bewegen.
Das andere Designproblem betraf die Aufzugsruftasten. Sie müssen beleuchtete Taster sein, aber die Leuchten müssen unabhängig vom Taster steuerbar sein. Wir haben einige passende bei eBay gefunden.
Materialien
Knöpfe mit separaten Lichtern (Wir haben bei eBay gekauft, sie sollten so aussehen:


- Ein Arduino Mega2560 – wir haben uns für dieses entschieden, weil es mehr GPIO-Pins für alle Schnickschnack im Projekt hatte. Offiziell kaufen – Sie können möglicherweise eine Nachahmung/Kompatibilität günstiger bekommen.
- Eine 8 × 8-LED-Matrix zur Anzeige von Pfeilen Kaufen (Amazon)
- Eine Sieben-Segment-Anzeige zur Anzeige der Stockwerksnummern Kaufen (SparkFun)
- Ein Schrittmotor und eine Treiberplatine zum Bewegen des Autos Kaufen Sie 5er-Pack (Elegoo) Hinweis:Sie verwenden nur einen, benötigen jedoch möglicherweise mehr. Und Sie können die mitgelieferte Box wiederverwenden. 🙂
- Ein Mega2560-Protoboard zum Anschließen unserer Kabel Kaufen (BangGood) Wir haben den Header oben entlötet, das musst du nicht.
- Schraubklemmen (10 × 2) Kaufen (frys.com)Sie benötigen 4
- Fadenspule
Alle unten aufgeführten Materialien finden Sie bei Ihrem örtlichen Home Depot oder einem anderen Baumarkt:
- Hartfaserplatten und 3/4-Quadratmeter-Formteil für den Aufzug und die Kabine.
- Aluminiumwinkel zum Halten des Motors
- Verschiedene Schrauben
- Schlauch als Buchse in der Spule
- Schnur (wir haben eine strapazierfähige Drachenschnur aus Nylon verwendet)
Erstellen
Wir haben die Welle und das Auto aus Faserplatten und Formteilen hergestellt, um die Ecken zu verstärken.
Wir begannen mit dem Aufzugsschacht. Wir schneiden 3 Stück Faserplatten auf 36″x8″ für die Seiten und die Rückseite (die Vorderseite ist offen). Dann mit 4 Stück 3/4 "Quadratformteil, 36" lang, schraubten wir die Faserplatte zusammen, um eine vertikale Welle zu bilden. Quadratische Faserplatten oben und unten halten alles quadratisch.
Die Aufzugskabine ist als nächstes dran. Es verwendet die gleiche Art von Konstruktion, mit Wänden, Decken und Böden aus Faserplatten und Stützen aus Kiefernholz. Es hat fast die volle Breite des Schafts, reitet jedoch zwischen der Vorder- und Rückseite der Kiefer (also ist es breiter als tief). Wir haben oben am Auto einen Ösenhaken angebracht, damit es an einer Schnur hängt.

Stellen Sie sicher, dass Sie nicht zu früh einen Boden an Ihrem Schacht anbringen, denn Sie müssen das Auto ein- und ausfahren können! Sobald der Test abgeschlossen ist, können Sie den Boden hinzufügen.
Der Motor sitzt oben auf dem Aufzug. Wir haben eine normale Holzspule (aus Nähgarn) an der Welle des Motors befestigt. Das ist etwas knifflig. Die Motorwelle hat eine flache Kante, aber das Loch in der Spule ist natürlich rund. Also bohrten und klopften wir ein Loch in die Spule und setzten eine Schraube, um gegen die flache Kante der Motorwelle zu halten. Außerdem ist das Loch in der Spule größer als die Motorwelle. Um als Buchse zu fungieren, um den Platz einzunehmen, haben wir ein sehr kurzes Stück Gummischlauch entsprechender Größe verwendet.

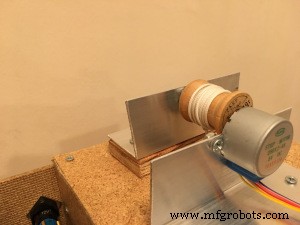
Dann haben wir den Motor auf ein Stück Aluminiumwinkel montiert und dieses oben auf die Welle geschraubt. Um die andere Seite der Spule zu stützen, stecken wir eine Schraube durch ein zweites Stück Winkelaluminium. Dies sorgt dafür, dass das Gewicht des Aufzugs die Spule nicht von der Motorwelle zieht, sondern eben bleibt.
Wir haben mehr Faserplatten verwendet, um die Knopfleisten herzustellen. Links haben wir ein Brett in Schachthöhe für die Ruftasten verwendet. Wir haben abwechselnd rote und grüne Knöpfe verwendet. Rot für unten, grün für oben. Das oberste Stockwerk hat nur ein rotes und das untere hat nur ein grünes. Unser Panel „im Aufzug“ befindet sich auf der rechten Seite. Wir schneiden zusätzlich zu den 5 Löchern für die Tasten Löcher für die LED-Matrix und die Siebensegmentanzeige.


Wir haben 4 Schraubkästen montiert. Zwei auf der Ruftafel und zwei seitlich neben der „Innen-“ Fahrstuhlkonsole.
Verkabelung
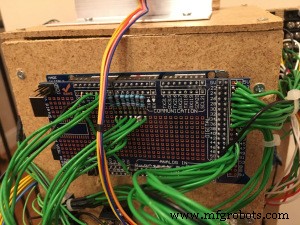
Die Verkabelung ist knifflig, weil es eine Menge davon gibt! Wir haben uns für einen Arduino Mega Prototyping Shield entschieden, auch weil wir schon einen hatten :-). Aber die eigentliche Motivation war, dass wir bei so vielen Drähten befürchteten, dass sich unweigerlich etwas lösen würde, wenn wir nur die Standard-Arduino-Pin-Verbindungen verwenden würden. Mit dem Prototyping-Shield könnten wir Drähte direkt verlöten und dieses Risiko vermeiden. Darüber hinaus bietet es uns einen bequemen Platz, um Dinge wie Widerstände zu platzieren, die für unsere 7-Segment-Anzeige erforderlich sind.
Allerdings wollten wir nicht, dass all diese verschiedenen Panels fest miteinander verbunden sind, denn wenn wir einen Fehler machen, wäre es sehr schwer, ihn zu beheben. Jeder Draht hat also eine Art abnehmbares Ende. Wir haben Schraubenblöcke zwischen den Schalttafeln und dem Arduino verwendet, und für die 7-Segment- und LED-Matrix sind ein Ende des Drahts immer noch Schnelltrennstifte.
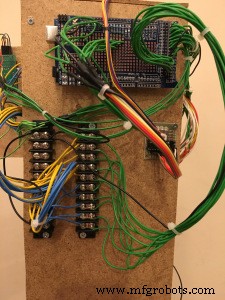
Für die Tastenfelder haben wir eigene Kabelbäume mit Crimp-Federleisten hergestellt, die perfekt auf die Tastenklemmen passen. Da jede Taste zwei Erdungen benötigt (eine für die Taste und eine separate für das Licht), hätte es viele Erdungsdrähte gegeben, wenn wir sie alle zum Arduino geführt hätten. Stattdessen haben wir sie alle mit einem schönen benutzerdefinierten Kabelbaum verkettet. Die Signalstifte (einer für den Schalter und einer für das Licht an jedem Knopf) sind alle getrennt und verlaufen zu den Schraubblöcken.


Schließlich gaben uns die Schraubblöcke einen weiteren Vorteil – wir verwendeten Vollkerndraht zum Löten an die Prototypenabschirmung, aber wir verwendeten Litzendraht für die Crimp-Anschlüsse an den Rückseiten der Tasten. Die Schraubblöcke gaben uns die Möglichkeit, ohne Löten von einem zum anderen zu wechseln.
Programmierung
Wir hatten viele Überarbeitungen des Codes, aber hier ist die aktuelle Version. Der komplizierteste Teil der Software ist die Logik, um herauszufinden, wohin die Aufzugskabine gehen soll. Wenn es auf Etage 2 ist, möchte jemand drinnen zu 3 gehen, jemand möchte von 4 herunter und von 1 aufwärts … wo gehen Sie zuerst?
Der andere komplizierte Teil ist, dass die Schrittmotorbibliothek normalerweise so funktioniert, dass während der Bewegung des Motors nichts die Arduino-Funktion „loop()“ aufruft. Es sollte jedoch funktionieren, wenn jemand einen Knopf drückt, während der Aufzug unterwegs ist. Sie können das Ziel also nicht in einem einzigen Schritt erreichen – Sie müssen sich ein Stück nach dem anderen bewegen und unterwegs nach Tastendrücken (und möglicherweise Änderungen des Ziels) suchen.
Sie können unsere Arduino-Skizze hier herunterladen.
So laden Sie den Code hoch:
Sie müssen diese Bibliotheken herunterladen:
- LEDControlMS
- SevenSeg
Laden Sie den Code hoch:
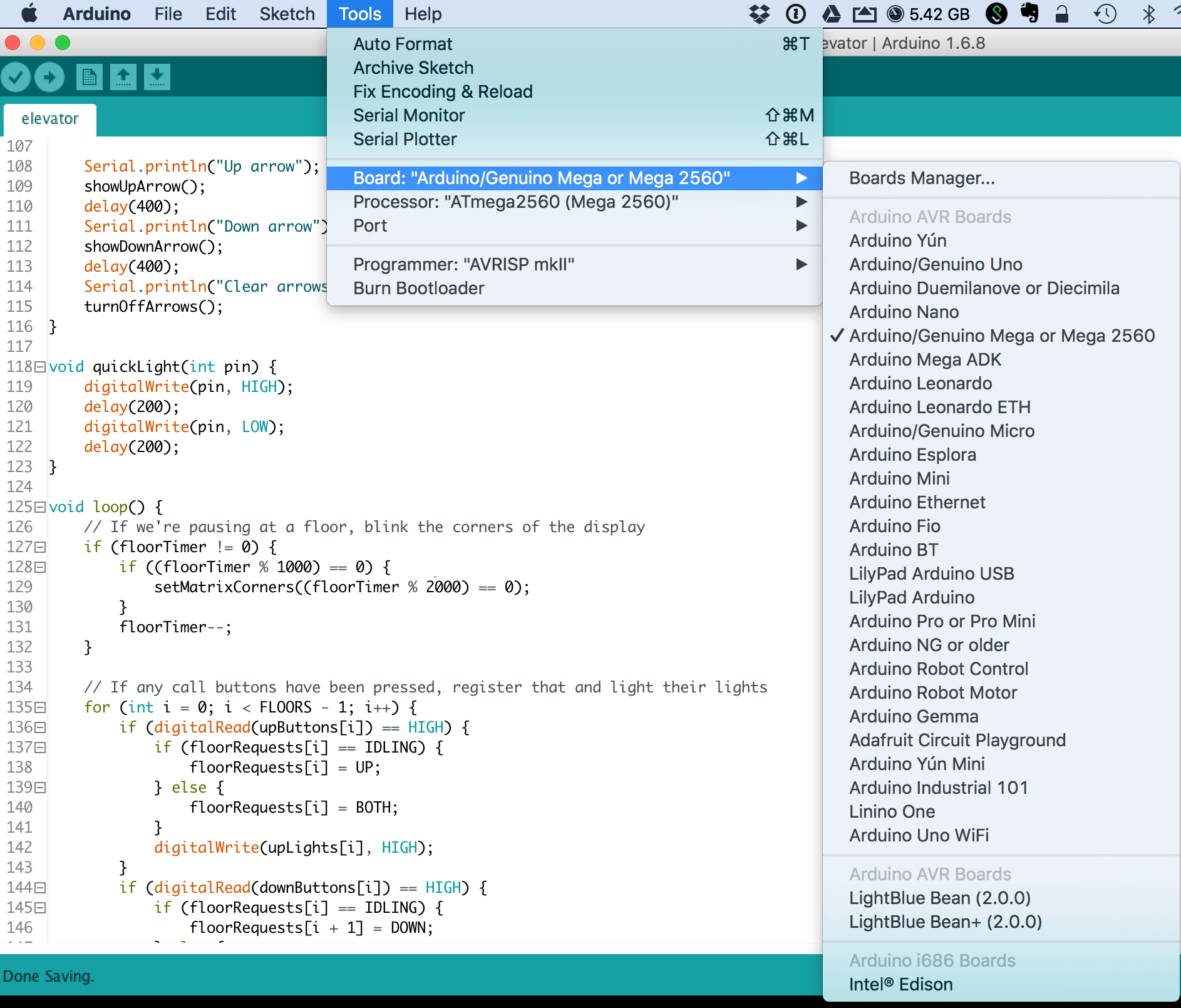
- Wählen Sie das richtige Board aus: Siehe dieses Bild
- Wählen Sie den Port:Ähnlich, aber Sie gehen zu "Port". Unter MacOS wird es so etwas wie /dev/cu.usbmodem1411 sein, während es unter Windows so etwas wie COM2 sein wird.
- Laden Sie Ihren Code hoch.
Wenn ja, herzlichen Glückwunsch! Weiter zum Testen. Wenn dies nicht der Fall ist, gehen Sie zurück zu Schritt 5. Wenn dies nicht erneut funktioniert, überprüfen Sie Ihre Verkabelung. Wenn das hat nicht funktioniert, kontaktiere uns über den Link oben.
- Laden Sie die Arduino-IDE herunter. arduino.cc
- Öffne den Code.
- Informationen zum Installieren von Bibliotheken finden Sie in dieser Anleitung.
- Der Aufzug sollte seinen Selbsttest durchlaufen. Alle Ruftasten sollten nacheinander aufleuchten, dann die fünf Tasten im Aufzug, dann die Siebensegmentanzeige, dann sollte die Matrix Auf- und Abwärtspfeile anzeigen. Nach Abschluss zeigt die 7-Segment-Anzeige die letzte bekannte Etagennummer der Aufzugskabine an.
Testen/Kalibrieren
Da der Schrittmotor für jede Etage genau wissen muss, wo er anhalten muss, müssen Sie ihn einmal manuell mitteilen. Es wird sich dies im nichtflüchtigen Speicher merken (d.h. es wird es auch dann speichern, wenn die Stromversorgung unterbrochen wird).
Kalibrieren:
- Halten Sie die obere und untere Taste auf der rechten Seite gedrückt. Die Matrix sollte ein C (für Kalibrieren) anzeigen.
- Verwenden Sie diese oberen und unteren Tasten, um die Kabine manuell zu der im sieben Segment angezeigten Etage zu bewegen. Wenn es an der richtigen Stelle ist, drücke die mittlere Taste.
- Wiederholen Sie Schritt 2 für alle fünf Stockwerke. Wenn Sie fertig sind, sollte sich die Matrix ausschalten.
Nächste Schritte
Projekte wie dieses sind nie wirklich fertig! Wir möchten die Struktur von Aufzug und Schacht mit lasergeschnittenen Teilen nachbauen. Wir haben dazu eine Handstichsäge verwendet und so sind unsere Schnitte nicht wirklich gerade … das ist teilweise der Grund für unser „Reibungsproblem“. Gleichzeitig würden wir eine bessere Motorhalterung entwickeln und einen besseren, schnelleren Motor bekommen.
Auf elektronischem Weg hatten wir die Aufforderung, jedes Mal, wenn sich die Aufzugstür öffnet, eine Klingel oder ein Glockenspiel hinzuzufügen, wie es bei vielen echten Aufzügen der Fall ist. Das machen wir auch.
Alle Gedanken oder Vorschläge zu diesem Projekt, lass es uns bitte in den Kommentaren wissen!
Versionsverlauf
Hinweis:Der Google Drive-Link wird mit jeder Version automatisch aktualisiert.
Version 2:Wir haben den Fehler behoben, bei dem das Rufen des Aufzugs von außen auf der aktuellen Etage dazu führen kann, dass die Software hängen bleibt und Sie die Reset-Taste drücken müssen.
Code
Arduino LED-Matrix-Bibliothek
https://github.com/shaai/Arduino_LED_matrix_sketchhttps://github.com/shaai/Arduino_LED_matrix_sketchSevenSeg-Bibliothek
https://github.com/sigvaldm/SevenSeghttps://github.com/sigvaldm/SevenSegArduino-Skizze
Herstellungsprozess