


ROS2 + DDS:Spielen Sie es noch einmal
>
Um die aufgezeichneten Daten wieder in ROS2 abzuspielen:
rtireplay -cfgFile ros2_replay.xml -cfgName simple_example
Ergebnisse
Jetzt habe ich ROS2-LiDAR-Daten gesammelt, die während einer Reihe von Autosimulator-Sitzungen generiert wurden, und diese sind alle wie erwartet bei Bedarf abspielbar:
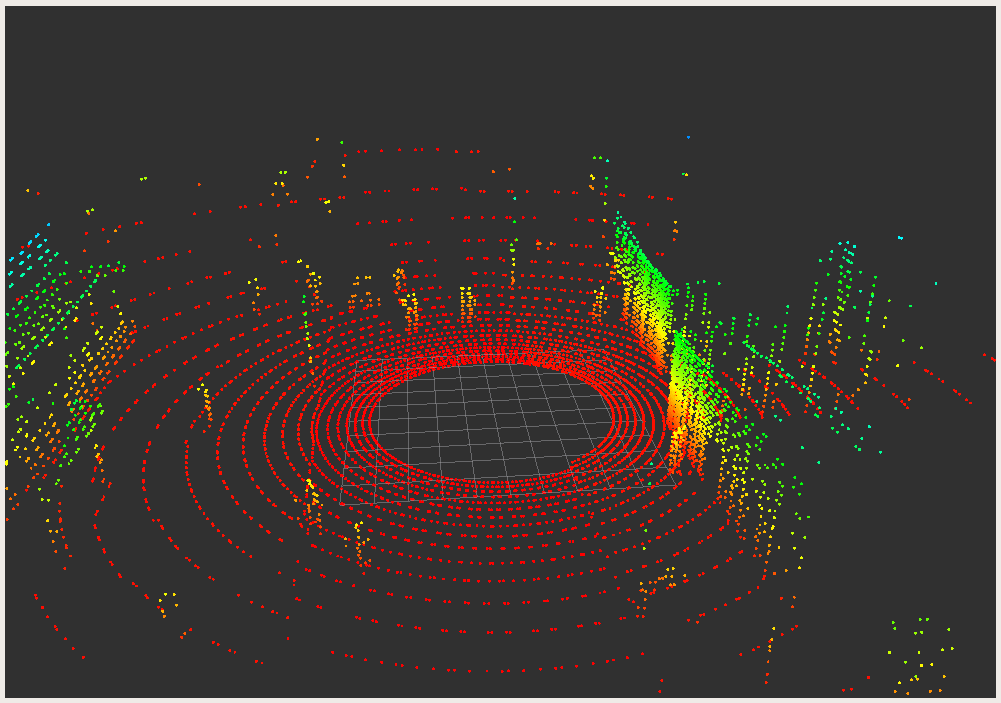
Schön! Ich kann jetzt LiDAR-Daten bei Bedarf wiedergeben, ohne einen dedizierten Automobilsimulator (oder ein tatsächliches Fahrzeug) zu benötigen.
Es hat Spaß gemacht mit dem
Weitere Informationen zu ROS2 und DDS finden Sie in den vorherigen RTI-Blog-Posts:
A Field Guide to Interoperability and When Ecosystems Merge
Internet der Dinge-Technologie
- Open DDS vs. RTI DDS-Software
- MQTT und DDS:Machine-to-Machine-Kommunikation im IoT
- Connext DDS und das industrielle IoT:Die 5 wichtigsten Dinge, die Sie wissen sollten
- Die vierte industrielle Revolution
- Datenkonform im IoT bleiben
- Was mache ich mit den Daten?!
- Demokratisierung des IoT
- 5 Trends in der Konnektivität
- Top 10 der IIoT-Plattformen
- Die Zukunft der Rechenzentren