


Was ist ein PID-Controller? Seine Typen, Arbeitsweise und Anwendungen
PID-Controller – Was sind sie und wie funktionieren sie?
PID-Regler ist ein am häufigsten verwendeter Steueralgorithmus in der industriellen Automatisierung und in Anwendungen, und mehr als 95 % der industriellen Steuerungen sind vom PID-Typ. PID-Regler werden für eine präzisere und genauere Steuerung verschiedener Parameter verwendet.
Am häufigsten werden diese zur Regelung von Temperatur, Druck, Geschwindigkeit, Durchfluss und anderen Prozessvariablen verwendet. Aufgrund ihrer robusten Leistung und funktionalen Einfachheit wurden diese von enormen industriellen Anwendungen akzeptiert, bei denen eine präzisere Steuerung die wichtigste Anforderung ist. Mal sehen, wie der PID-Regler funktioniert ?
- Verwandter Beitrag:Was ist ein verteiltes Steuerungssystem (DCS)?

Was ist ein PID-Controller?
Eine Kombination aus proportionalen, integralen und differentiellen Aktionen wird häufiger als PID-Aktion bezeichnet und daher der Name PID (Proportional-Integral-Ableitung) Controller . Diese drei Grundkoeffizienten werden in jedem PID-Regler für spezifische Anwendungen variiert, um eine optimale Antwort zu erhalten.
Er erhält den Eingangsparameter vom Sensor, der als tatsächliche Prozessvariable bezeichnet wird. Es akzeptiert auch den gewünschten Aktuatorausgang, der als Sollvariable bezeichnet wird, und berechnet und kombiniert dann die proportionalen, integralen und differenziellen Antworten, um den Ausgang für den Aktuator zu berechnen.
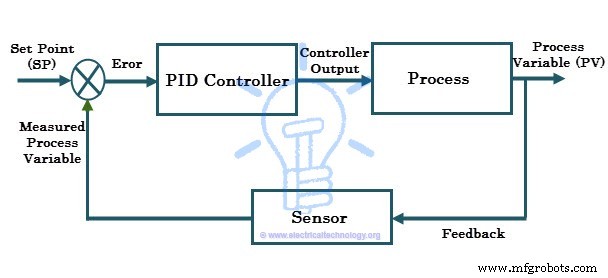
Betrachten Sie das in der obigen Abbildung gezeigte typische Steuersystem, in dem die Prozessvariable eines Prozesses auf einem bestimmten Niveau gehalten werden muss. Angenommen, die Prozessvariable ist die Temperatur (in Grad Celsius). Um die Prozessvariable (d. h. Temperatur) zu messen, wird ein Sensor verwendet (sagen wir ein RTD).
Ein Sollwert ist die gewünschte Reaktion des Prozesses. Angenommen, der Prozess muss bei 80 Grad Celsius gehalten werden, und dann ist der Sollwert 80 Grad Celsius. Angenommen, die vom Sensor gemessene Temperatur beträgt 50 Grad Celsius (was nichts anderes als eine Prozessvariable ist), aber der Temperatursollwert beträgt 80 Grad Celsius.
Diese Abweichung des Istwerts vom Sollwert im PID-Regelalgorithmus bewirkt, dass der Ausgang an das Stellglied (hier eine Heizung) abhängig von der Kombination von Proportional, Integral erzeugt wird und abgeleitete Antworten. Der PID-Regler variiert also kontinuierlich den Ausgang zum Aktuator, bis sich die Prozessvariable auf den eingestellten Wert einpendelt. Dies wird auch als Closed Loop Feedback Control System bezeichnet .
Verwandter Beitrag:
- Was ist AC Drive? Funktionsweise &Arten von elektrischen Antrieben &VFD
- Was ist Gleichstromantrieb? Betrieb und Klassifizierung von DC-Antrieben
Arbeitsweise des PID-Reglers
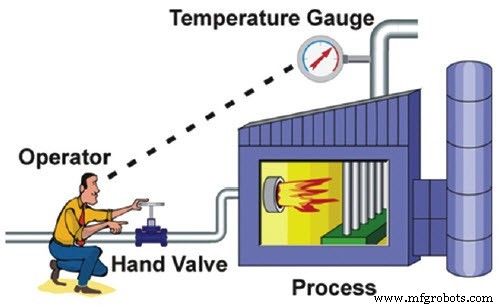
Bei der manuellen Steuerung kann der Bediener die Prozessvariable (die gesteuert werden muss, wie Temperatur, Durchfluss, Geschwindigkeit usw.) regelmäßig ablesen und die Steuervariable (d. h manipuliert werden, um die Regelgröße auf vorgeschriebene Grenzen zu bringen, wie z. B. ein Heizelement, Stromventile, Motoreingang usw.). Andererseits werden bei der automatischen Steuerung Messung und Einstellung automatisch kontinuierlich durchgeführt.
Alle modernen industriellen Steuerungen sind vom automatischen Typ (oder Closed-Loop-Steuerungen), die normalerweise so konstruiert sind, dass sie eine oder eine Kombination von Steuerungsaktionen erzeugen. Zu diesen Kontrollaktionen gehört
- EIN-AUS-Controller
- Proportionalregler
- Proportional-Integral-Regler
- Proportional-Differential-Regler
- Proportional-Integral-Differential-Regler
Bei einem EIN-AUS-Regler sind zwei Zustände möglich, um die manipulierte Variable zu steuern, d. h. entweder vollständig EIN (wenn die Prozessvariable unter dem Sollwert liegt) oder vollständig AUS ( wenn die Prozessvariable über dem Sollwert liegt). Die Ausgabe wird also von oszillierender Natur sein. Um eine präzise Steuerung zu erreichen, verwenden die meisten Branchen den PID-Regler (oder PI oder PD hängt von der Anwendung ab). Sehen wir uns diese Kontrollaktionen an.
P-Controller
Proportionale Steuerung oder einfach P-Regler erzeugt den Regelausgang proportional zum Stromfehler. Hier ist der Fehler die Differenz zwischen Sollwert und Prozessvariable (d. h. e =SP – PV). Dieser Fehlerwert multipliziert mit der proportionalen Verstärkung (Kc) bestimmt die Ausgangsantwort, oder anders ausgedrückt, die proportionale Verstärkung bestimmt das Verhältnis der proportionalen Ausgangsantwort zum Fehlerwert.
Beispiel:Die Größe des Fehlers ist 20 und Kc ist 4, dann ist die proportionale Antwort 80. Wenn der Fehlerwert null ist, ist der Reglerausgang oder die Antwort null. Die Reaktionsgeschwindigkeit (Einschwingverhalten) wird erhöht, indem der Wert der Proportionalverstärkung Kc erhöht wird. Wenn jedoch Kc über den normalen Bereich hinaus erhöht wird, beginnt die Prozessvariable mit einer höheren Rate zu oszillieren und verursacht eine Instabilität des Systems. 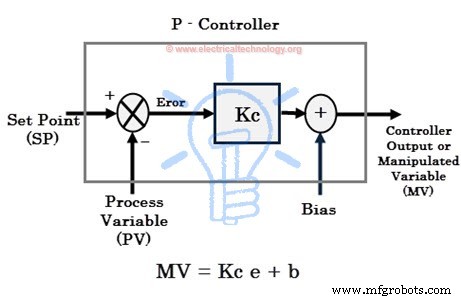
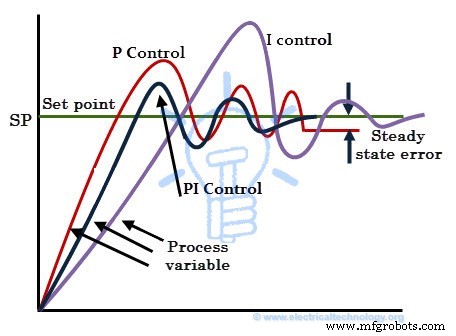
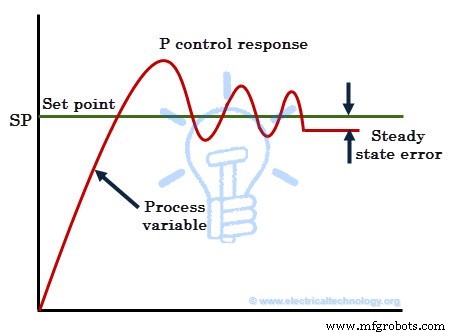 Obwohl der P-Regler Stabilität der Prozessvariablen mit guter Reaktionsgeschwindigkeit bietet, wird es immer einen Fehler dazwischen geben den Sollwert und die tatsächliche Prozessvariable. In den meisten Fällen ist dieser Controller mit manueller Rückstellung oder Vorspannung ausgestattet, um den Fehler zu reduzieren, wenn er alleine verwendet wird. Ein Null-Fehler-Zustand kann jedoch von dieser Steuerung nicht erreicht werden. Daher wird es immer einen stationären Fehler in der Reaktion des p-Reglers geben, wie in Abbildung gezeigt.
Obwohl der P-Regler Stabilität der Prozessvariablen mit guter Reaktionsgeschwindigkeit bietet, wird es immer einen Fehler dazwischen geben den Sollwert und die tatsächliche Prozessvariable. In den meisten Fällen ist dieser Controller mit manueller Rückstellung oder Vorspannung ausgestattet, um den Fehler zu reduzieren, wenn er alleine verwendet wird. Ein Null-Fehler-Zustand kann jedoch von dieser Steuerung nicht erreicht werden. Daher wird es immer einen stationären Fehler in der Reaktion des p-Reglers geben, wie in Abbildung gezeigt.
Verwandte Beiträge:
- Was ist industrielle Automatisierung | Arten der industriellen Automatisierung
- Smart Home Automation System – Schaltung und Quellcode
I-Controller
- Integrierter Controller oder I-Regler wird hauptsächlich verwendet, um den stationären Fehler des Systems zu reduzieren. Die Integralkomponente integriert den Fehlerterm über einen Zeitraum, bis der Fehler Null wird. Dies führt dazu, dass selbst ein kleiner Fehlerwert zu einer hohen Integralantwort führt. Bei der Null-Fehler-Bedingung hält es die Ausgabe an die endgültige Steuervorrichtung auf ihrem letzten Wert, um einen stationären Fehler von Null aufrechtzuerhalten, aber im Fall des P-Reglers ist die Ausgabe Null, wenn der Fehler Null ist.
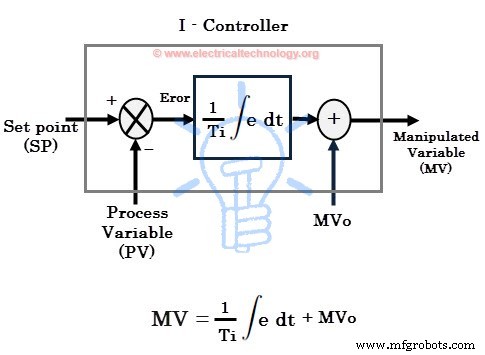
Wenn der Fehler negativ ist, wird die integrale Antwort oder Ausgabe verringert. Die Reaktionsgeschwindigkeit ist langsam (bedeutet, langsam zu reagieren), wenn der I-Regler allein verwendet wird, verbessert jedoch die stationäre Reaktion. Durch Verringern der Integralverstärkung Ki wird die Reaktionsgeschwindigkeit erhöht.
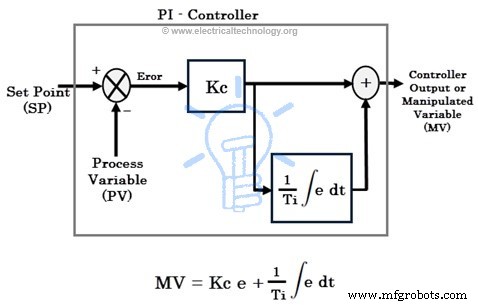
Für viele Anwendungen werden proportionale und integrale Steuerungen kombiniert, um eine gute Reaktionsgeschwindigkeit (im Falle eines P-Reglers) und eine bessere stationäre Reaktion (im Falle eines I-Reglers) zu erreichen. Meistens PI-Controller werden im industriellen Betrieb eingesetzt, um sowohl das Einschwingverhalten als auch das stationäre Verhalten zu verbessern. Die Reaktionen nur der I-Regelung, nur der P-Regelung und der PI-Regelung sind in der folgenden Abbildung gezeigt .
Antwort des D-Controllers
Ein abgeleiteter Controller ( oder einfach D-Controller) sieht, wie schnell sich die Prozessvariable pro Zeiteinheit ändert, und erzeugt die Ausgabe proportional zur Änderungsrate. Die Ableitungsausgabe ist gleich der Änderungsrate des Fehlers multipliziert mit einer Ableitungskonstante. Der D-Regler wird verwendet, wenn sich die Prozessorvariable mit hoher Geschwindigkeit zu ändern beginnt.
In einem solchen Fall bewegt der D-Regler das endgültige Steuergerät (z. B. Regelventile oder Motor) in eine solche Richtung, um der schnellen Änderung einer Prozessvariablen entgegenzuwirken. Es ist zu beachten, dass der D-Regler allein nicht für irgendwelche Steueranwendungen verwendet werden kann. 
Die Differentialaktion erhöht die Reaktionsgeschwindigkeit, da sie einen Kickstart für die Ausgabe gibt und somit das zukünftige Verhalten des Fehlers vorwegnimmt. Der schnellere D-Regler reagiert auf die Änderungen der Prozessvariablen, wenn der Ableitungsterm groß ist (was durch Erhöhen der Ableitungskonstante oder Zeit Td erreicht wird).
Bei den meisten PID-Reglern hängt die Antwort des D-Reglers nur von der Prozessvariablen und nicht vom Fehler ab. Dadurch werden Leistungsspitzen (oder ein plötzlicher Anstieg der Leistung) im Falle einer plötzlichen Sollwertänderung durch den Bediener vermieden. Außerdem verwenden die meisten Steuerungssysteme weniger Vorhaltezeit td, da die Vorhaltezeit sehr empfindlich auf das Rauschen in der Prozessvariablen reagiert, was selbst bei geringem Rauschen zu einer extrem hohen Ausgabe führt. 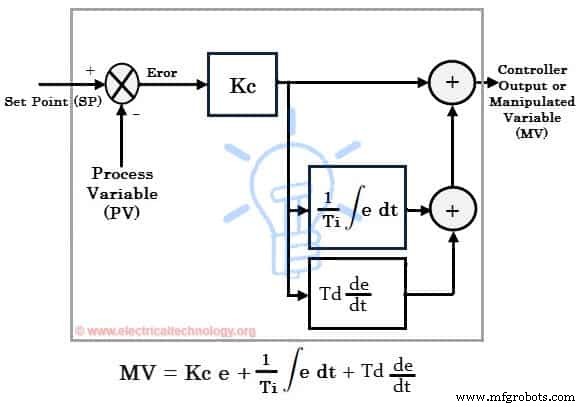
Daher wird durch Kombinieren von proportionalen, integralen und differenziellen Steuerreaktionen ein PID-Regler gebildet. Ein PID-Regler findet universelle Anwendung; man muss jedoch die PID-Einstellungen kennen und richtig einstellen, um die gewünschte Ausgabe zu erzeugen. Tuning bedeutet, eine ideale Antwort des PID-Reglers zu erhalten, indem optimale Verstärkungen von Proportional-, Integral- und Differentialparametern eingestellt werden. 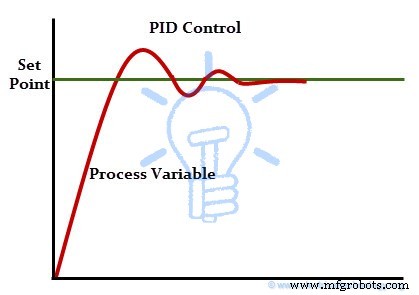
Es gibt verschiedene Methoden zum Einstellen des PID-Reglers, um die gewünschte Reaktion zu erhalten. Einige dieser Methoden umfassen Versuch und Irrtum, Prozessreaktionskurventechnik und die Zeigler-Nichols-Methode. Am häufigsten werden Zeigler-Nichols und Trial-and-Error-Methoden verwendet.
Hier geht es um den PID-Regler und seine Funktionsweise. Aufgrund der Einfachheit der Reglerstruktur sind PID-Regler für eine Vielzahl von Prozessen anwendbar. Und es kann auch auf jeden Prozess abgestimmt werden, auch ohne das detaillierte mathematische Modell des Prozesses zu kennen. Einige der Anwendungen umfassen eine PID-Controller-basierte Motordrehzahlregelung, Temperaturregelung, Druckregelung, Durchflussregelung, Flüssigkeitsstand usw.
Echtzeit-PID-Controller
Auf dem heutigen Markt sind verschiedene Arten von PID-Reglern erhältlich, die für alle industriellen Steuerungsanforderungen wie Füllstand, Durchfluss, Temperatur und Druck verwendet werden können. Wenn Sie sich entscheiden, solche Parameter für einen Prozess mit PID zu steuern, können Sie entweder eine SPS oder einen eigenständigen PID-Controller verwenden.
Eigenständige PID-Regler werden dort verwendet, wo ein oder zwei Regelkreise überwacht und gesteuert werden müssen oder in Situationen, in denen der Zugang mit größeren Systemen schwierig ist. Diese dedizierten Steuergeräte bieten eine Vielzahl von Optionen für Einzel- und Doppelschleifensteuerung. Eigenständige PID-Regler bieten mehrere Sollwertkonfigurationen und erzeugen auch die unabhängigen mehreren Alarme. 
Einige dieser eigenständigen Regler umfassen Yokogava-Temperaturregler, Honeywell-PID-Regler, OMEGA-Autotune-PID-Regler, ABB-PID-Regler und Siemens-PID-Regler.
Bei den meisten Steuerungsanwendungen werden SPSen als PID-Regler verwendet. PID-Blöcke sind in SPS/PACs integriert und bieten erweiterte Optionen für eine präzise Steuerung. SPS sind intelligenter und leistungsfähiger als eigenständige Steuerungen und erleichtern die Arbeit. Jede SPS enthält den PID-Block in ihrer Programmiersoftware, egal ob Siemens, ABB, AB, Delta, Emersion oder Yokogava SPS.
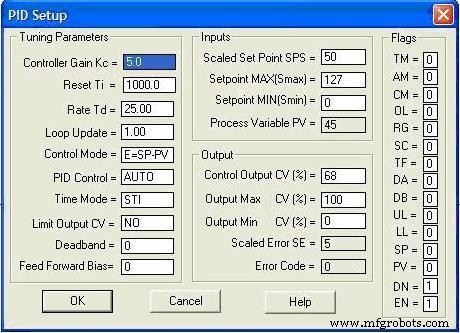
Die folgende Abbildung zeigt den Allen Bradley (AB) PID-Block und sein Setup-Fenster. 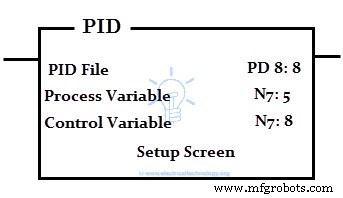
Die folgende Abbildung zeigt den Siemens PID-Block . 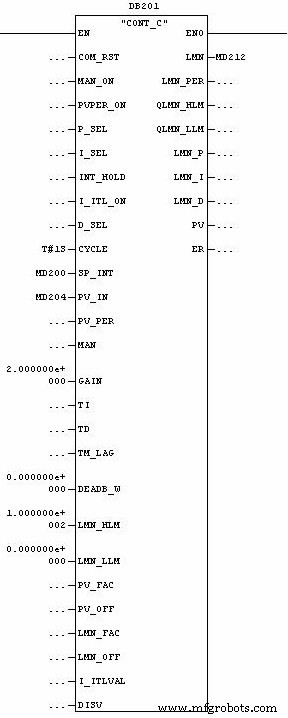
Die folgende Abbildung zeigt den PID-Regler Vom LabVIEW PID-Toolset angebotene VIs. 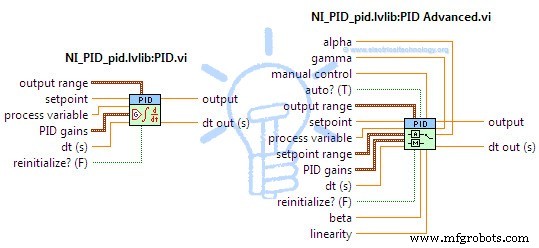
Industrietechnik
- Was ist ein Distanzsensor und seine Anwendungen
- Was ist 3D-Druck? Arbeitsprinzip | Typen | Anwendungen
- Was ist Laserstrahlbearbeitung? - Typen und Arbeitsweise
- Was ist Rapid Prototyping? - Arten und Funktionsweise
- Was ist additive Fertigung? - Typen und Arbeitsweise
- Was ist Räumen? - Verfahren, Arbeiten und Arten
- Was ist Laserschweißen? - Arbeitsweise, Typen und Anwendung
- Was ist Widerstandsschweißen? - Typen und Funktionsweise
- Was ist eine Vorrichtungsbohrmaschine? - Typen und Funktionsweise
- Was ist Extrusion? - Arbeitsweise, Typen und Anwendung