


Vollautomatischer Wasserstandsregler mit SRF04
Vollautomatischer Wasserstandsregler mit SRF04, L293D und PIC16F84A
Einführung in den automatischen Wasserstandsregler
Überwachung und Steuerung des Wasserstands in Wassertanks gehört in fast vielen Wohn- und Gewerbebereichen zu den wichtigsten Arbeiten. In den meisten Fällen, insbesondere in Wohngebäuden, wird es mangels automatischer Mittel ermüdend und unbequem, den Wasserstand in den Tanks häufig zu überwachen. Tatsächlich wäre ein Überlaufen von Wasser an Orten mit Wasserknappheit eine ziemlich teure Sache.
Die einzige Lösung für das obige Problem ist eine automatische Möglichkeit zur Überwachung und Steuerung des Wasserstands. Während es viele Techniken wie die Verwendung von Abstandssensoren, die Verwendung von Stromsonden, die Verwendung von Ultraschall-Ranger usw. gibt, konzentrieren wir uns hier auf die Verwendung von Ultraschall-Ranger.

- Verwandtes Projekt: Regenalarmschaltung – Schnee-, Wasser- und Regenmelder-Projekt
Systemübersicht des Wasserstandsreglers
Das System besteht aus einem Ultraschall-Entfernungssensor, der so auf dem Tank platziert ist, dass er nach dem Auslösen ein Ultraschallsignal aussendet. Im Tank vorhandenes Wasser würde von dem Signal reflektiert werden. Der Sensor würde dieses Signal empfangen und die zwischen diesen beiden Signalen verstrichene Zeit gibt eine Schätzung über die von den Signalen zurückgelegte Entfernung, also den Wasserstand von oben.
Hier wird ein Mikrocontroller verwendet, um ein Triggersignal an den Ultraschall-Ranger zu senden. Sobald ein Echo empfangen wird, wird die Zeitverzögerung zwischen den beiden Impulsen berechnet und diese ist direkt proportional zum Wasserstand. Die Zeitverzögerung wird mit Hilfe des Timers berechnet, dessen Anzahl der Zählimpulse die zurückgelegte Strecke per Signal oder den Wasserstand angibt.
Da hier der Ranger auf dem Tank platziert wird, erfolgt die Steuerung des Wasserflusses unter Berücksichtigung des Wasserstands von der Oberseite des Tanks. Wenn beispielsweise festgestellt wird, dass der gemessene Bereich zwischen 0 und 1 cm liegt, läuft der Tank über und der Mikrocontroller sendet ein Steuersignal, um den Motor in umgekehrter Richtung zu drehen, um das überschüssige Wasser zu entfernen. ‘
Bei einer Reichweite zwischen 2 und 5 cm ist der Tank voll und der Mikrocontroller sendet ein Steuersignal zum Abschalten des Motors. Beträgt die Reichweite mehr als 5 cm, ist der Tank fast leer und der Mikrocontroller sendet ein Steuersignal, um den Motor in Vorwärtsrichtung zu drehen.
Schaltplan des automatischen Wasserstandsreglers
Zum Vergrößern auf das Bild klicken
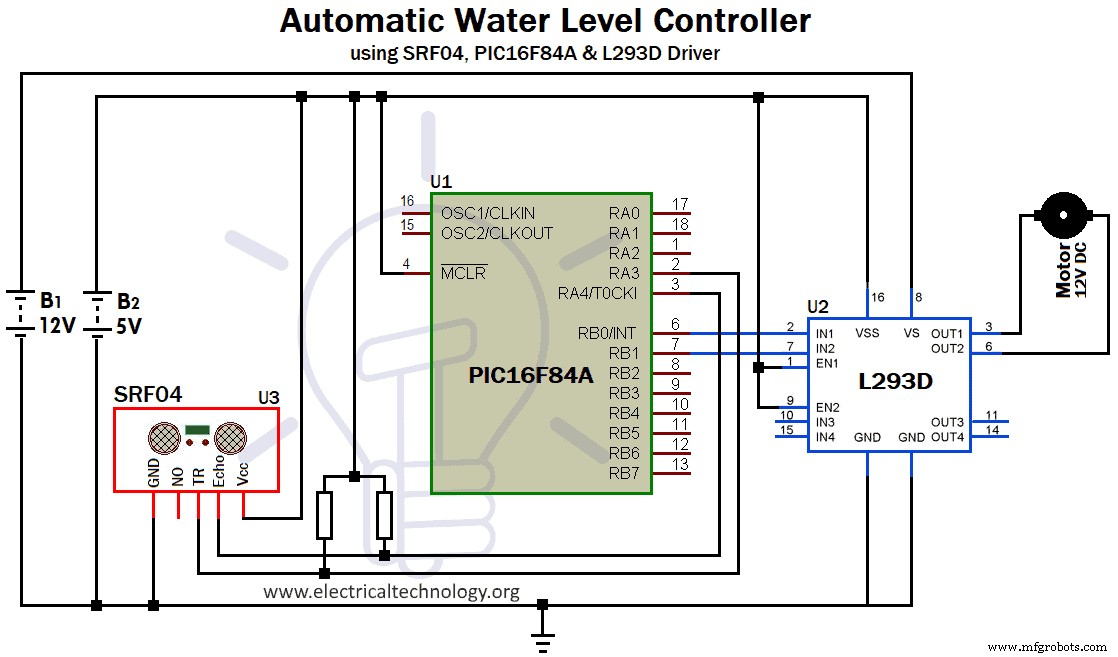
Abbildung 1:Wasserstandsregler
Teilebeschreibung
Die folgenden Komponenten würden zum Entwerfen der Schaltung verwendet.
- Ultraschall-Entfernungsmesser SRF04
- PIC-Mikrocontroller PIC16F84A
- Motortreiber L293D
- Gleichstrommotor
- Zwei 1K-Widerstände
Lassen Sie uns eine kurze Vorstellung von jeder Komponente geben
Ultraschall-Entfernungsmesser SRF04 :
Der SRF04 ist ein hochwertiger Ultraschall-Ranger, der in vielen Roboteranwendungen zur einfachen Erkennung von Hindernissen eingesetzt wird. Es erfordert ein Signal von 10 Mikrosekunden, um ausgelöst zu werden. 
Abbildung 2:Ultraschall-Entfernungsmesser SRF04
Sobald es ausgelöst wurde, sendet es 8 Ultraschallimpulse mit einer Frequenz von 40 KHz aus und sendet gleichzeitig eine Echolinie, die auf HIGH angehoben wird. Sobald es das reflektierte Signal oder Echo empfängt, senkt es die Echolinie auf LOW.
Die Breite des Echoimpulses bezeichnet also die Distanz, die das Signal zurückgelegt hat, oder anders ausgedrückt die Distanz vom Ranger zum Objekt. Die Echolinie ist also ein Impuls, dessen Breite proportional zum Abstand zum Objekt ist. Für 1 cm würde die Echoimpulsbreite 58 Mikrosekunden betragen. 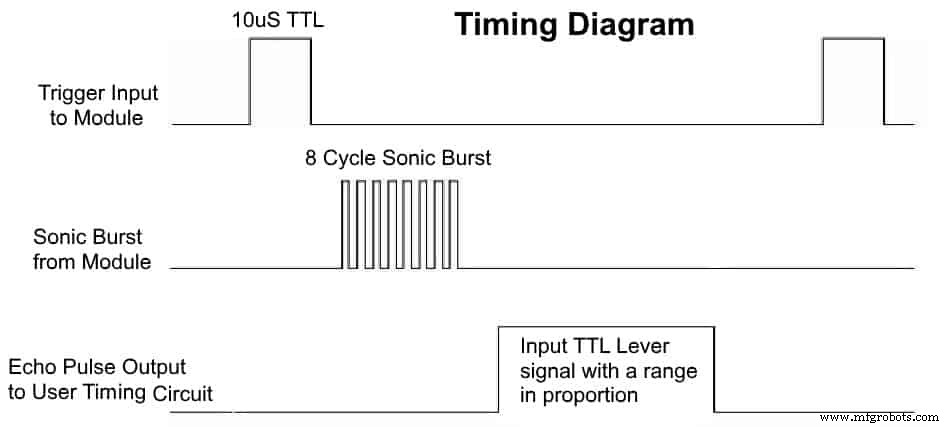
Abbildung 3:SRF04-Zeitdiagramm
PIC-Mikrocontroller PIC16F84A:
Abbildung 4:PIC-Mikrocontroller PIC16F84A
Es ist ein CMOS-kompatibler, 8-Bit, 18-Pin-Flash-Mikrocontroller mit einem einzelnen 8-Bit-Timer (mit programmierbarem 8-Bit-Prescaler). Der Timer-Betrieb wird über die folgenden Register gesteuert – OPTION_REG, TMR0 und INTCON. Das OPTION_REG ist ein 8-Bit-Register, dessen 5 te Bit (T0CS) wählt die erforderliche Zeitgeber- oder Zähleroperation aus.
Das Setzen des Bits wählt den Zählerbetrieb aus, während das Löschen des Bits den Timerbetrieb auswählt. TMR0 ist das Timer-Register, während INTCON das Interrupt-Register ist, dessen 5
te
Bit (T0IE) bezeichnet das Timer-Flag, d. h. es wird gesetzt, wenn der Timer überläuft. 
Motortreiber L293D:
Abbildung 5:Motortreiber-IC L293D
Es ist ein 16-Pin-DC-Motortreiber-IC auf H-Brückenbasis. Es hat die Fähigkeit, zwei Motoren und in beide Richtungen anzutreiben. Er besteht aus zwei Aktivierungspins (Pin1 und 9), die, wenn sie auf HIGH gesetzt sind, den IC-Betrieb aktivieren. Es fungiert im Grunde als Schnittstelle zwischen dem Mikrocontroller und dem Gleichstrommotor. Er besteht aus vier Eingangspins – zwei für jede H-Brückenschaltung. Unten ist eine Tabelle angegeben, die die Motorsteuerung bezeichnet. 
| IN1 (Stift 2) | IN2 (Stift 7) | EN1 (Stift 1) | Motorbetrieb |
| HOCH | HOCH | HOCH | AUS |
| NIEDRIG | NIEDRIG | HOCH | AUS |
| HOCH | NIEDRIG | HOCH | EIN (im Uhrzeigersinn) |
| NIEDRIG | HOCH | HOCH | EIN (gegen den Uhrzeigersinn) |
| X | X | NIEDRIG | AUS |
Hinweis:Da SRF04 ein TTL-kompatibles Gerät und PIC16F84A ein CMOS-kompatibles Gerät ist, verwenden wir einen Pull-Up-Widerstand mit einem Wert von 1K, um die Änderung des Spannungspegels zu kompensieren.
P>Funktion und Betrieb des automatischen Wasserstandsreglers
Das Programm ist so geschrieben, dass ein 10-Mikrosekunden-Impuls vom Mikrocontroller gesendet wird, um den Ultraschall-Ranger auszulösen. Dies wird unter Verwendung einer Verzögerungsfunktion geschrieben. Das Timer-Register TMR0 wird mit dem Dezimalwert 200 geladen, so dass es 55 Zählungen macht.
Der Ausgang von SRF04, das Echosignal, wird an Pin RA4 (dem Timer-Clock-Pin, wodurch ein externer Taktimpuls für den Timer bereitgestellt wird) empfangen. Sobald das Echosignal von HIGH nach LOW wechselt, wird der Timer aktiviert. Während der Zeitgeber zählt, wird das Interrupt-Flag-Bit T0IE überwacht. Einmal eingestellt, ist der Timer deaktiviert.
Der Vorgang wird für einen weiteren Echoimpuls wiederholt und so weiter. Die Anzahl der Betätigungen des Zeitgebers wird berechnet und bezeichnet die Anzahl der Echoimpulse. Da jeder Echoimpuls 58 Mikrosekunden lang ist, bezeichnet er 1 cm. Somit würden 5 Echoimpulse 5 cm bedeuten. Der Wert dieser Zählung, gespeichert in einer ganzen Zahl, wird verwendet, um den Gleichstrommotor zu steuern.
Wenn der Wert zwischen 2 und 5 liegt, sendet der Mikrocontroller HIGH-Signale an die Pins RB0 und RB1 (verbunden mit IN1 bzw. IN2 von L293D), um den Motor auszuschalten. Wenn der Wert zwischen 5 und 20 liegt, sendet der Mikrocontroller ein HIGH-Signal an IN1 und ein LOW-Signal an IN2, um den Motor einzuschalten und im Uhrzeigersinn zu drehen. Wenn der Wert zwischen 0 und 1 liegt, sendet der Mikrocontroller ein LOW-Signal an IN1 und ein HIGH-Signal an IN2, um den Motor einzuschalten und gegen den Uhrzeigersinn zu drehen.
Vorteile des automatischen Wasserstandsreglers mit SRF04
- Es wäre ein einfaches und bequemes System.
- Es wäre ein kostengünstiges System aufgrund der Verwendung von kostengünstigen Komponenten.
- Die Verwendung einer automatischen Technik würde die Hürden beseitigen, denen man bei der Wasserstandskontrolle mit manuellen Mitteln gegenübersteht.
- Da keine mechanischen Teile verwendet werden, würde dies das Risiko von mechanischem Verschleiß oder Korrosion eliminieren.
Nachteile des automatischen Wasserstandsreglers
- Der Ultraschall-Entfernungsmesser SRF04 würde aufgrund der Verwendung vieler elektronischer Geräte einer Dämpfung ausgesetzt und sollte daher ordnungsgemäß isoliert werden.
- Dieses System ist so konzipiert, dass sowohl der Sensor als auch der Aktor nahe beieinander platziert werden müssen. Laienhaft ausgedrückt ist dieses Steuersystem für Orte gedacht, an denen sich der Wassertank in der Nähe der Wasserpumpe befindet. Daher eignet sich für viele Gebäude, in denen Tauchpumpen verwendet werden und Wassertanks auf den Dächern stehen, dieses automatische Wasserstandsreglersystem kann nicht benutzt werden. Dies kann jedoch durch die Verwendung einer Kommunikationsschaltung geändert werden.
Industrietechnik
- Verwendung wasserfreier Technologien im Färbeprozess
- 4 Vorteile der Verwendung einer intelligenten Lecksuchlösung in Gebäuden
- 5 Vorteile der Verwendung des IoT-betriebenen Wasserleckerkennungssystems von Biz4intlias in der Industrie
- Intelligente Wasserstandsüberwachung und -steuerung für effektives Wassermanagement
- 7 Vorteile der Verwendung der Smart Level Monitoring-Lösung von Biz4Intellia
- Verwendung eines IoT-betriebenen Flusspegel-Überwachungssystems für ein effizientes Wassermanagement
- Ist Polyurethan wasserdicht?
- Manuelle vs. automatische Stückliste
- 7 Vorteile einer voll-/halbautomatischen Küche für Cloud-Küchen
- Was ist eine automatische Wasserpumpe?