


Fallstudie:Verbesserung des Workflows der additiven Fertigung
Die Verbesserung Ihres Software-Workflows kann wichtige Minuten Ihres 3D-Druckprozesses einsparen. So haben Forscher den Arbeitsablauf der additiven Fertigung mit RoboDK verbessert.
Wenn Sie mit einem Roboter 3D-drucken, kann Ihr Software-Workflow einen wichtigen Einfluss auf Ihre Produktivität haben. Wenn Sie den Arbeitsablauf auch nur um ein paar Minuten einsparen können, kann dies im Laufe der Zeit zu einer beträchtlichen zusätzlichen Produktivität führen.
Die Zeit, die Sie zum Wechseln zwischen verschiedenen Softwarepaketen benötigen, ist normalerweise kurz, macht Ihren Arbeitsablauf jedoch weniger reibungslos und kann die additive Fertigung folglich weniger effizient machen.
Forscher aus Portugal und Norwegen haben kürzlich eine Anwendung entwickelt, um den Arbeitsablauf der additiven Fertigung von RoboDK über die RoboDK-API noch weiter zu optimieren.
Lernen Sie die Forscher kennen
Diese technische Anwendung wurde für eine Studie der Forscher Filipe Monteiro Ribeiro und J. Norberto Pires von der Universität Coimbra, Portugal, und Amin S. Azar vom SINTEF – Norwegens führendem Zentrum für Fertigungsforschung – entwickelt.
Die Studie mit dem Titel „Implementierung einer Robotersteuerungsarchitektur für additive Fertigungsanwendungen“ wurde Anfang dieses Jahres in der Zeitschrift Industrial Robot veröffentlicht.
Was wollten die Forscher erreichen?
RoboDK ist eine großartige Möglichkeit, die additive Fertigung um Robotik zu erweitern. Wir haben bereits gesehen, wie Leute damit eine Vielzahl von Objekten drucken, darunter 3D-gedruckte Betonstrukturen, 3D-gedruckte Kunst und 3D-gedruckte Lebensmittel.
Der 3D-Druck-Workflow ist in RoboDK bereits recht gut – Sie generieren den GCODE einfach mit einer Slicer-Software (üblicherweise die Open-Source-Slic3r) und laden dann den resultierenden Pfad in RoboDK.
Das Forscherteam stellte jedoch fest, dass RoboDK allein nicht den bestmöglichen Workflow bietet. Ihre Studie skizziert ein Programm, das sie entwickelt haben, um die Fähigkeiten von RoboDK und Slic3r direkt zu kombinieren, ohne G-Code-Dateien manuell zwischen den beiden Programmen verschieben zu müssen.
Um dies zu erreichen, entwickelte das Team ein grafisches Programm mit Python und der RoboDK-API.
Die Ziele dieser Studie waren:
- Um eine additive Fertigungssimulation zu entwickeln – Besonders einfach geht das mit RoboDK, das eine intuitive Umgebung für die Robotersimulation bereitstellt. Das Team fügte auch ein einfaches Python-Programm hinzu, um die Abscheidung von 3D-gedrucktem Material zu simulieren, da RoboDK dies derzeit nicht selbst simuliert.
- Um die Offline-Simulation von Robotern zu ermöglichen – Laut den Forschern war dies ein wesentlicher Bestandteil ihrer Anwendung, da die Verwendung einer virtuellen Umgebung das Risiko einer Beschädigung eines echten Roboters verringerte. RoboDK macht es sehr einfach, das simulierte Roboterprogramm über seine zahlreichen Postprozessoren in Code für den echten Roboter zu verwandeln.
- Asynchroner Betrieb – Wichtig war dem Team, dass das von ihnen erstellte Programm den Betrieb des simulierten Roboters in RoboDK nicht beeinträchtigt. Beispielsweise sollte die Simulation weiterlaufen, wenn das Programm ein neues Modell in Slic3r geladen hat. Dies ist mit unserem robolink-Python-Modul einfach zu erreichen, das eine asynchrone Verbindung zwischen RoboDK und jedem Python-Programm bereitstellt.
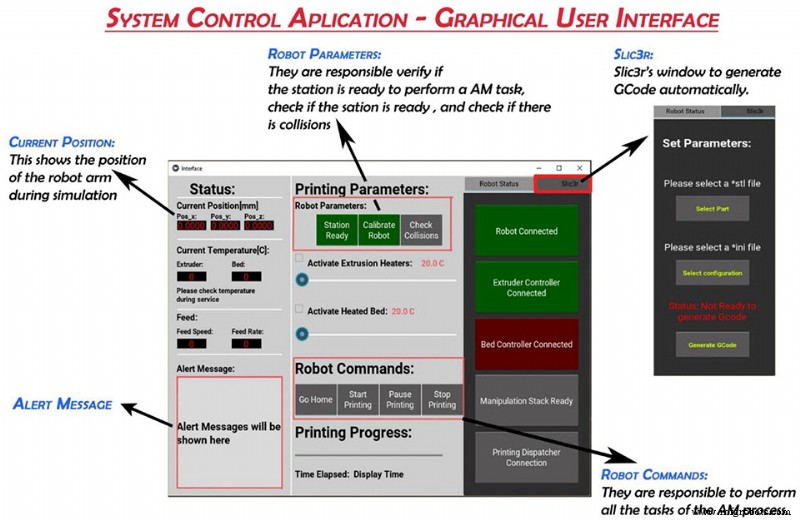
Das resultierende Programm befindet sich zwischen Slic3r und RoboDK und koordiniert den additiven Fertigungsprozess.
Was hat die Studie gezeigt?
Die Anwendung des Teams nutzte die Fähigkeiten von RoboDK sehr gut. Insbesondere zeigten sie, wie effektiv es sein kann, die API zu verwenden, um Teile Ihres eigenen Workflows zu kombinieren.
Die RoboDK-API ist ein sehr leistungsfähiger Teil von RoboDK, wird aber von vielen unserer Benutzer nicht verwendet. Dies ist bedauerlich, da es dazu beitragen kann, den reibungslosen Arbeitsablauf Ihrer Roboterprogrammierung erheblich zu verbessern. Es unterstützt mehrere Programmiersprachen, aber die von den Forschern verwendete Python-Bibliothek ist besonders einfach zu verwenden – vorausgesetzt natürlich, dass Sie die Programmiersprache Python mögen (und warum auch nicht? Es ist so eine einfache Sprache!). P>
Der Vorteil des asynchronen Betriebs
Einer der Schwerpunkte der Studie war der asynchrone Betrieb. Für das Team war es wichtig sicherzustellen, dass kein Teil des Programms den Betrieb eines anderen Teils des Programms stoppt.
RoboDK wird bereits asynchron ausgeführt – Sie können mehrere Python-Skripte gleichzeitig ausführen, ohne dass sie sich gegenseitig stören – aber das Team benötigte ein eigenes Programm, um auch diese asynchrone Funktion zu haben.
Zum Beispiel wollten sie nicht, dass ihr Programm „hängt“, wenn sie darauf warten, dass Slic3r die Generierung von GCODE abschließt. Sie mussten in der Lage sein, den Roboter zu steuern, während das Programm andere Dinge erledigte. Sie haben dies mit dem asyncio erreicht Bibliothek für Python, die eine beliebte Option für die gleichzeitige Programmierung ist.
So verbessern Sie Ihren eigenen Workflow mit der API
Obwohl die Studie von Robotikforschern durchgeführt wurde, denken Sie nicht, dass die Programmierung mit der RoboDK-API kompliziert ist. Auch wenn Sie kein Programmierer sind, können Sie die API ganz einfach selbst verwenden.
Wenn Sie Ihr eigenes Programm entwickeln möchten, um Ihren Workflow zu verbessern, können Sie die folgenden Schritte ausführen:
- Machen Sie sich über die Dokumentationsseite mit der API vertraut. Informieren Sie sich über seine Fähigkeiten und denken Sie darüber nach, wofür Sie es in Ihrer Anwendung verwenden könnten.
- Planen Sie, welche Teile Ihrer Anwendung Sie im externen Programm codieren werden.
- Erstellen Sie Ihr Programm mithilfe der API, um mit RoboDK zu interagieren.
- Testen Sie Ihr Programm, bevor Sie es in Ihren Prozess integrieren.
Natürlich müssen Sie keinen eigenen Code schreiben, um Ihren Workflow zu verbessern. Sie können die RoboDK-Plugins auch für Programme wie SolidWorks verwenden, die auch den Arbeitsablauf optimieren, wenn Sie andere Programme in Verbindung mit RoboDK verwenden.
Aber wie das Forscherteam gezeigt hat, kann die API sehr effektiv sein, um unterschiedliche Teile Ihres Workflows für Software zu glätten, die noch kein Plugin hat.
Denken Sie daran, dass sogar eine Verkürzung Ihres Programmierprozesses um ein paar Minuten langfristig zu zusätzlicher Produktivität führen kann.
Was könnten Sie durch die Verwendung der API in Ihrem Prozess erreichen? Erzählen Sie es uns in den Kommentaren unten oder beteiligen Sie sich an der Diskussion auf LinkedIn , Twittern , Facebook, Instagram oder in das RoboDK-Forum .
Industrieroboter
- 3D-Druck vs. Additive Fertigung:Was ist der Unterschied?
- Der Wert der additiven Fertigung in der Automobilindustrie
- Was ist der Business Case für das Additive Manufacturing Execution System in der Ersatzteilproduktion?
- Der Schritt hin zu echten Hybridprozessen in der additiven Fertigung
- Ist die Hybridfertigungstechnologie die Zukunft der additiven Fertigung?
- Verbinden des digitalen Threads:Skalierung der additiven Fertigung mit MES-/Workflow-Software
- Die Argumente dafür, die amerikanische Fertigung nach Hause zu bringen
- Der Fall für den 3D-Druck in der Fertigung
- Die Auswirkungen der additiven Fertigung auf die industrielle Produktion
- Die wichtigsten Arten der additiven Fertigung