


Optimierung der hochpräzisen Neigungs-/Winkelerkennung:Ermittlung der Basisleistung
Im ersten Teil dieser Serie haben wir die interne Struktur eines 3-Achsen-Hochpräzisions-MEMS-Beschleunigungsmessers untersucht. In diesem zweiten Artikel werden wir überprüfen, wie man einen guten Ausgangsdatensatz erhält, um die Basisleistung zu ermitteln und zu validieren, welche Art von Geräuschpegeln in nachfolgenden Datenanalysen zu erwarten sind.
Während der analoge Ausgang eines Beschleunigungsmessers mit jedem analogen Datenerfassungssystem zur Datenanalyse verbunden werden kann, bieten die Hersteller oft Evaluierungsboards an, die optimiert sind, um direkt in Kundensystemen platziert zu werden, um das Prototyping mit bestehenden eingebetteten Systemen zu vereinfachen. Zur Veranschaulichung für diesen Artikel wurde das Small Form Factor Evaluation Board EVAL-ADXL35x verwendet. Zur Datenprotokollierung und -analyse wurde das EVAL-ADXL35x an ein SDP-K1-Mikrocontroller-Board angeschlossen und mit der Mbed-Umgebung programmiert. Mbed ist eine quelloffene und kostenlose Entwicklungsumgebung für ARM-basierte Mikrocontroller-Boards. Es verfügt über einen Online-Compiler und ermöglicht Entwicklern einen schnellen Einstieg. Die SDP-K1-Platine wird, wenn sie an den PC angeschlossen ist, als externes Laufwerk angezeigt. Um das Board zu programmieren, ziehen Sie einfach die vom Compiler generierte Binärdatei in das SDP-K1-Laufwerk. 3, 4
Sobald das Mbed-System Daten über den UART protokolliert, haben wir jetzt eine grundlegende Testumgebung zum Ausprobieren von Beschleunigungsmesserexperimenten und zum Streamen der Ausgabe an ein einfaches Terminal zur Datenprotokollierung und weiteren Analyse. Es ist wichtig zu beachten, dass der Mbed-Code unabhängig von der Ausgangsdatenrate des Beschleunigungsmessers nur Register bei 2 Hz protokolliert. Eine schnellere Protokollierung ist in Mbed möglich, liegt jedoch außerhalb des Rahmens dieses Artikels.
Ein guter Ausgangsdatensatz hilft, die Basisleistung zu ermitteln und zu validieren, welche Art von Geräuschpegeln in den meisten unserer nachfolgenden Datenanalysen zu erwarten sind. Verwendung eines gelenkigen PanaVise-Schraubstockarms 5 die über eine Saugnapfhalterung verfügt, ermöglicht eine einigermaßen stabile Arbeitsfläche in einer Tischaufstellung, da sie an der Glasarbeitsfläche haftet. Die ADXL355-Platine (von der Seite gehalten) ist in dieser Konfiguration so stabil wie der Labortisch. Erfahrenere Power-Benutzer werden bemerken, dass diese Schraubstockhalterung ein gewisses Risiko einer Kippbewegung birgt, aber es ist eine einfache und kostengünstige Methode, die eine Änderung der Ausrichtung in Bezug auf die Schwerkraft ermöglicht. Wenn die ADXL355-Platine wie in Abbildung 1 in der Halterung platziert ist, wird ein Datensatz für 60 Sekunden für eine erste Analyse erfasst.
klicken Sie für das Bild in voller Größe
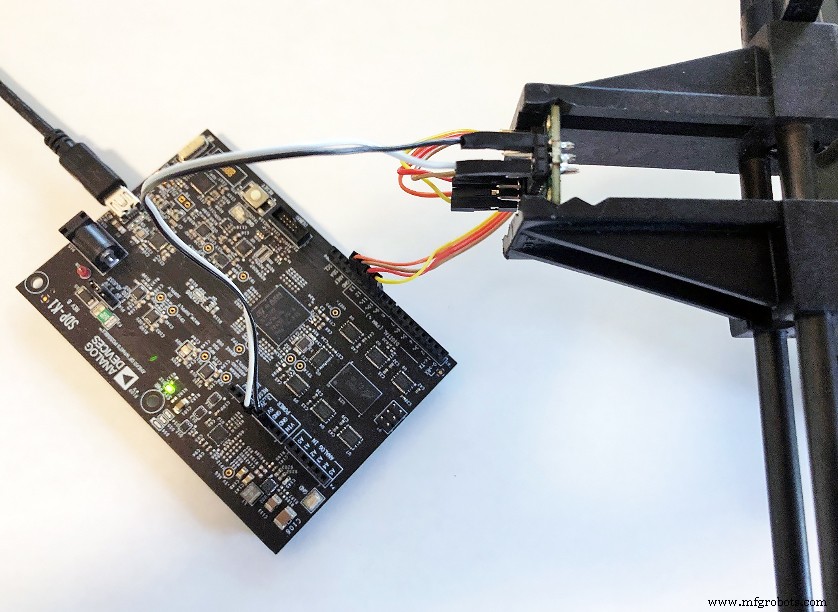
Abbildung 2. Testaufbau mit einer EVAL-ADXL35x-, SDP-K1- und PanaVise-Halterung. (Quelle:Analog Devices)
klicken Sie für das Bild in voller Größe
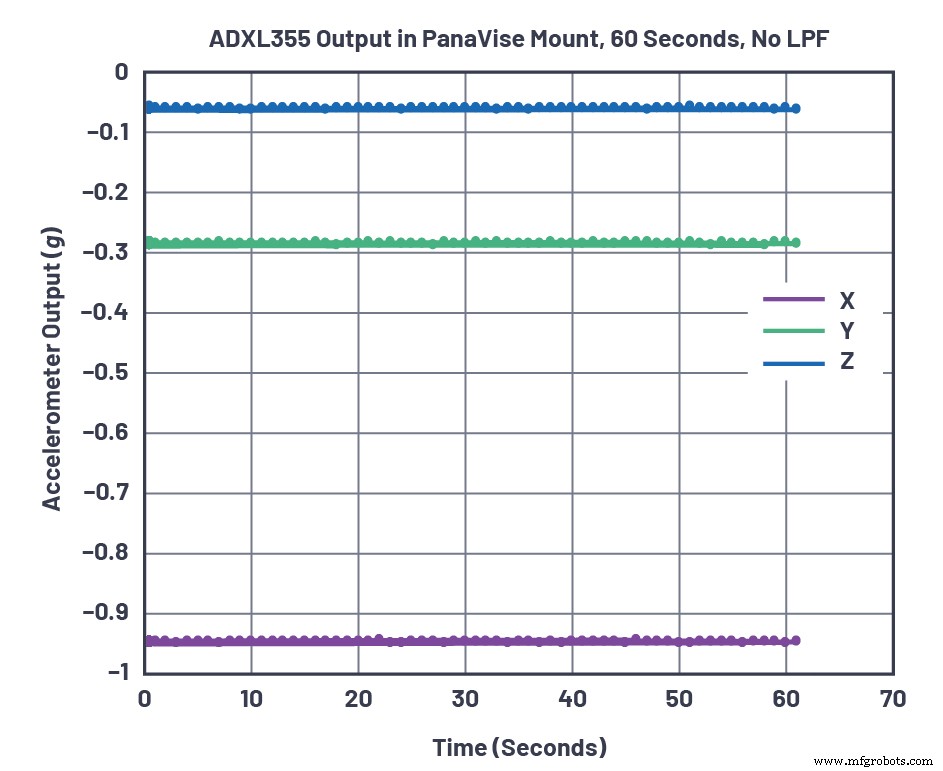
Abbildung 2. ADXL355-Daten ohne Tiefpassfilter (Register 0x28=0x00), aufgenommen über 1 Minute. (Quelle:Analog Devices)
Die Aufnahme der 120 Datenpunkte und die Messung einer Standardabweichung zeigt ein Rauschen im Bereich von 800 μg bis 1,1 mg . Aus den typischen Leistungsspezifikationen des ADXL355 im Datenblatt sehen wir die Rauschdichte mit 25 µg /√Hz. Mit den Standardeinstellungen des Tiefpassfilters (LPF) hat der Beschleunigungsmesser eine Bandbreite von etwa 1000 Hz. Das Rauschen wäre dann mit 25 µg . zu erwarten /√Hz × √1000 Hz =791 µg rms, unter Annahme eines Brick-Wall-Filters. Dieser erste Datensatz besteht den ersten Schnüffeltest. Um genau zu sein, sollte die Umwandlung von spektraler Rauschdichte in RMS-Rauschen einen Faktor aufweisen, der die Tatsache repräsentiert, dass der digitale LPF keinen unendlichen Roll-off (d. h. einen Brick-Wall-Filter) hat. Einige verwenden einen 1,6-fachen Koeffizienten für einen einfachen einpoligen RC-Abfall von 20 dB/Dekade, aber der digitale Tiefpassfilter ADXL355 ist kein einpoliger RC-Filter. Auf jeden Fall bringt uns die Annahme eines Koeffizienten zwischen 1 und 1,6 zumindest in die richtige Näherung für die Geräuscherwartungen.
Für viele Präzisionsmessanwendungen ist 1000 Hz eine viel zu große Bandbreite für die gemessenen Signale. Um den Kompromiss zwischen Bandbreite und Rauschen zu optimieren, verfügt der ADXL355 über einen integrierten digitalen Tiefpassfilter. Für den nächsten Test setzen wir den LPF auf 4 Hz, was eine Netto-Rauschreduzierung um einen Faktor von √1000/√4 ≈ 16 haben sollte. Dies geschieht einfach in der Mbed-Umgebung unter Verwendung der in Abbildung 3 gezeigten einfachen Struktur , während die Daten in Abbildung 4 dargestellt sind. 6 Nach der Filterung nahm das Rauschen wie erwartet nachweislich ab. Dies ist in Tabelle 1 unten gezeigt.
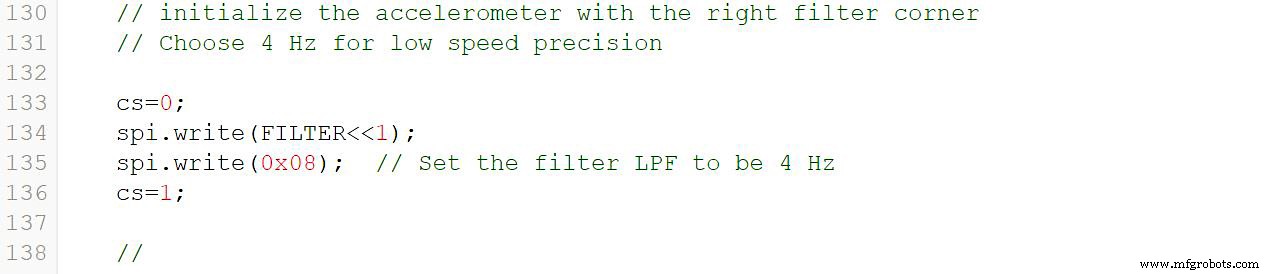
Abbildung 3. Mbed-Code zum Konfigurieren eines Registers. (Quelle:Analog Devices)
klicken Sie für das Bild in voller Größe
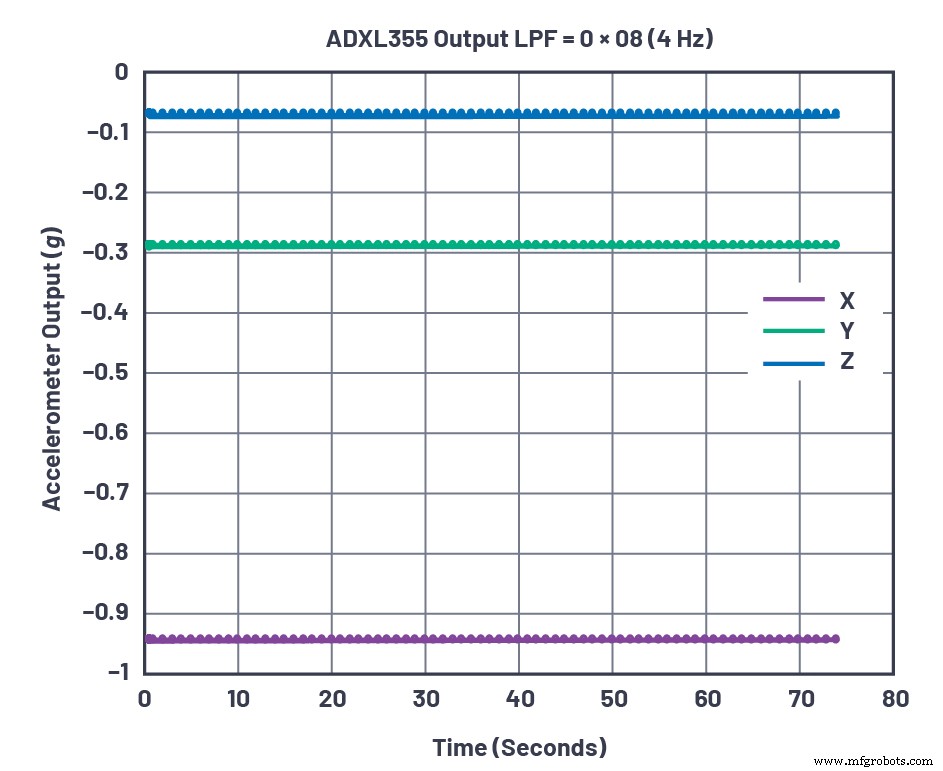
Abbildung 4. ADXL355-Daten mit auf 4 Hz eingestelltem LPF (Register 0x28=0x08), aufgenommen über 1 Minute. (Quelle:Analog Devices)
Tabelle 1. Erwartetes und gemessenes Rauschen des ADXL355 (Quelle:Analog Devices)
RauschenXYZTheoretisch(μg)Gemessen
(μg)Theoretisch
(μg)Gemessen
(μg)Theoretisch
(μg)Gemessen
(μg)Kein Filter79192379111397918054 Hz-Filter5058501855063
Tabelle 1 zeigt, dass das Rauschen in der y-Achse mit dem vorliegenden Aufbau höher ist als von der Theorie erwartet. Nachdem wir die wahrscheinlichen Ursachen untersucht hatten, stellten wir fest, dass sich zusätzliche Lüftervibrationen von Laptops und anderen Laborgeräten wahrscheinlich in der y-Achse als Rauschen bemerkbar machen. Um dies zu testen, wurde der Schraubstock gedreht, um die x-Achse in die Position zu bringen, in der sich die y-Achse für diesen Test befand und sich die Achse mit dem höheren Rauschen zur x-Achse bewegte. Der Rauschunterschied zwischen den Achsen scheint dann ein Instrumentenrauschen zu sein und kein intrinsischer Unterschied in den Rauschpegeln über die Achsen des Beschleunigungsmessers. Diese Art von Tests ist effektiv der "Hello World"-Test für einen geräuscharmen Beschleunigungsmesser, sodass er Vertrauen in weitere Tests gibt.
Um ein Gefühl dafür zu bekommen, wie stark sich ein Thermoschock auf den ADXL355 auswirken würde, haben wir eine Heißluftpistole genommen 7 und stellen Sie ihn in den Kühler-Luft-Modus (praktisch einige Grad über der Raumtemperatur), um den Beschleunigungsmesser thermisch zu belasten. Die Temperatur wird auch über den integrierten Temperatursensor des ADXL355 aufgezeichnet. Das Experiment verwendete den Schraubstock, um den ADXL355 vertikal zu platzieren, sodass eine Luftpistole Luft auf die Oberseite der Verpackung blasen kann. Das erwartete Ergebnis dieses Experiments ist, dass sich der Temperaturkoeffizient des Versatzes beim Aufheizen des Chips zeigen würde, aber jegliche unterschiedlichen thermischen Spannungen würden fast sofort auftreten. Mit anderen Worten, wenn die einzelne Sensorachse empfindlich auf unterschiedliche thermische Belastungen reagiert, erwartet man eine Erhöhung des Beschleunigungsmesserausgangs. Das Entfernen des Durchschnittswertes aus den Daten, wenn es ruhig war, ermöglicht einen einfachen Vergleich aller drei Achsen gleichzeitig. Die Ergebnisse sind in Abbildung 5 dargestellt.
klicken Sie für das Bild in voller Größe
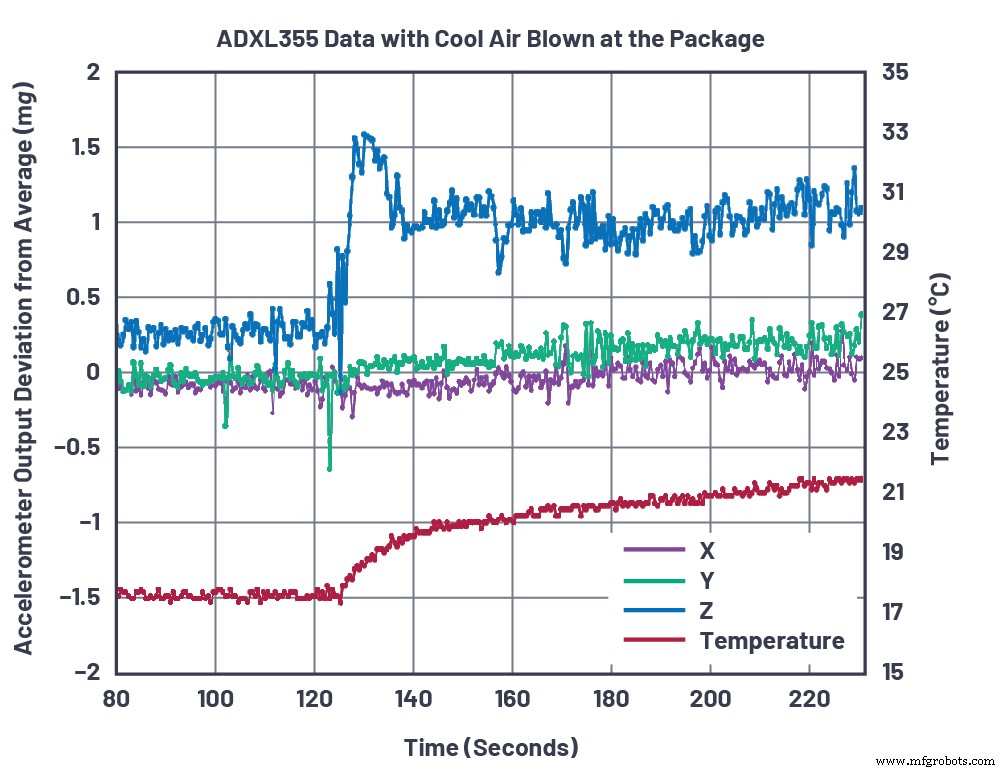
Abbildung 5. ADXL355 Thermoschockdaten bei Verwendung einer Heißluftpistole bei kalter Einstellung. (Quelle:Analog Devices)
Wie in Abbildung 5 zu sehen ist, bläst die Luftpistole etwas wärmere Luft auf das Keramikgehäuse, das hermetisch zur Umgebung abgedichtet ist. Dies ergibt ~1500 μg Verschiebung in der z-Achse, eine viel kleinere Verschiebung in der y-Achse (vielleicht ~100 µg ) und praktisch keine Verschiebung in der x-Achse. Während viele Endkundenprodukte über ein Gehäuse auf der Leiterplatte verfügen, das unterschiedliche thermische Belastungen verteilt, ist es wichtig, diese Arten von schnellen transienten Belastungen zu berücksichtigen, die sich in einem Offset-Fehler äußern können, wie in diesem einfachen Test zu sehen ist.
Abbildung 6 zeigt den entgegengesetzten Polaritätseffekt, wenn die Heißluftpistole ausgeschaltet ist.
klicken Sie für das Bild in voller Größe
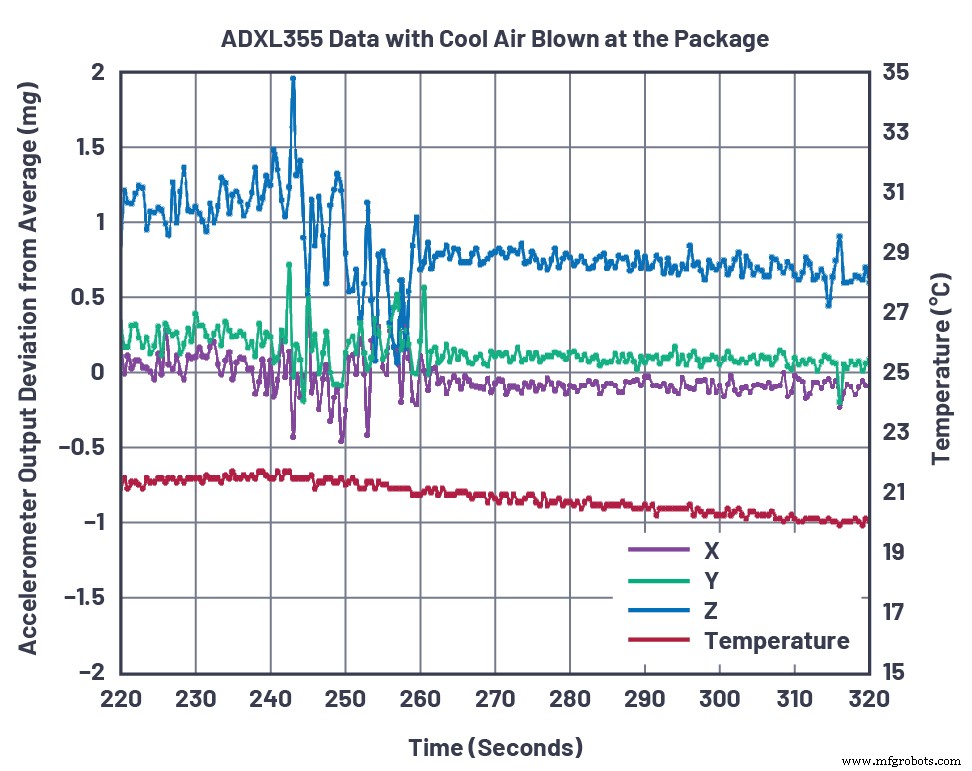
Abbildung 6. ADXL355 Thermoschock mit einer Druckluftpistole, die bei t =240 Sekunden abschaltet. (Quelle:Analog Devices)
Dieser Effekt ist noch ausgeprägter, wenn die Luftpistole in der beheizten Einstellung verwendet wird; das heißt, wenn der Temperaturschock größer ist. Die Leistung der Weller-Luftpistole liegt in der Größenordnung von ~400°C, daher ist es wichtig, sie in einiger Entfernung anzubringen, um Schäden durch Überhitzung oder thermischen Schock zu vermeiden. Bei diesem Test wurde die heiße Luft etwa 15 cm vom ADXL355 entfernt geblasen, was zu einem fast sofortigen Temperaturschock von ~40 °C führte, wie in Abbildung 7 gezeigt.
klicken Sie für das Bild in voller Größe
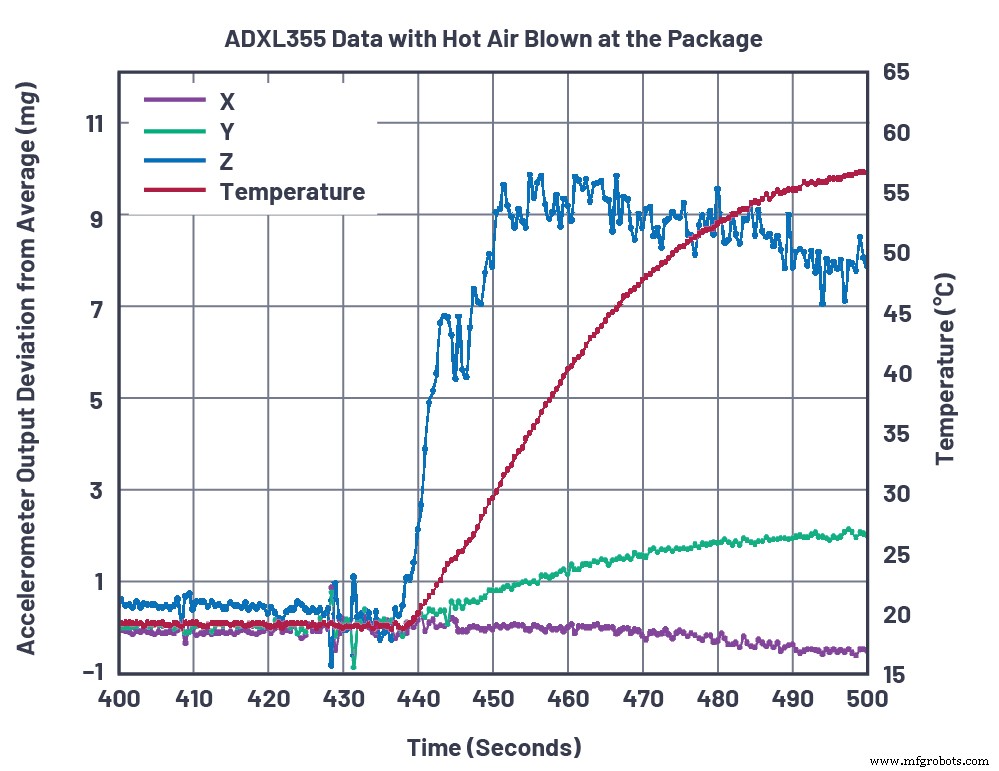
Abbildung 7. ADXL355 Thermoschock mit einer Heißluftpistole. (Quelle:Analog Devices)
Auch wenn der Temperaturschock recht stark ist, fällt auf, wie viel schneller die z-Achse in diesem Experiment reagiert als die x- und y-Achse. Bei Verwendung des Offset-Temperaturkoeffizienten aus dem Datenblatt und einer Temperaturverschiebung von 40°C würde man erwarten, dass etwa 100 µg . beobachtet werden /°C × 40 °C =4 mg Verschiebung, die die x- und y-Achsen schließlich zu zeigen beginnen. Beachten Sie jedoch, dass fast sofort 10 mg Verschiebung in der z-Achse zeigt, dass dies ein anderer Effekt ist, der behandelt wird und nicht eine Offset-Verschiebung aufgrund der Temperatur. Dies ist das Ergebnis unterschiedlicher thermischer Belastung/Beanspruchung des Sensors und wird am deutlichsten in der z-Achse sichtbar, da dieser Sensor empfindlicher auf unterschiedliche Belastungen reagiert als x und y, wie weiter oben in diesem Artikel beschrieben.
Der typische Temperaturkoeffizient des Offsets des ADXL355 (offset tempco) wird mit ±100 µg . angegeben /°C im Datenblatt. Es ist wichtig, die hier verwendete Testmethodik zu verstehen, da der Offset-Tempco mit den Beschleunigungsmessern in einem Ofen gemessen wird. Der Ofen wird langsam durch den Temperaturbereich des Sensors gefahren und die Steigungen der Offsets werden gemessen. Ein typisches Beispiel ist in Abbildung 8 dargestellt.
Klicken für Bild in voller Größe
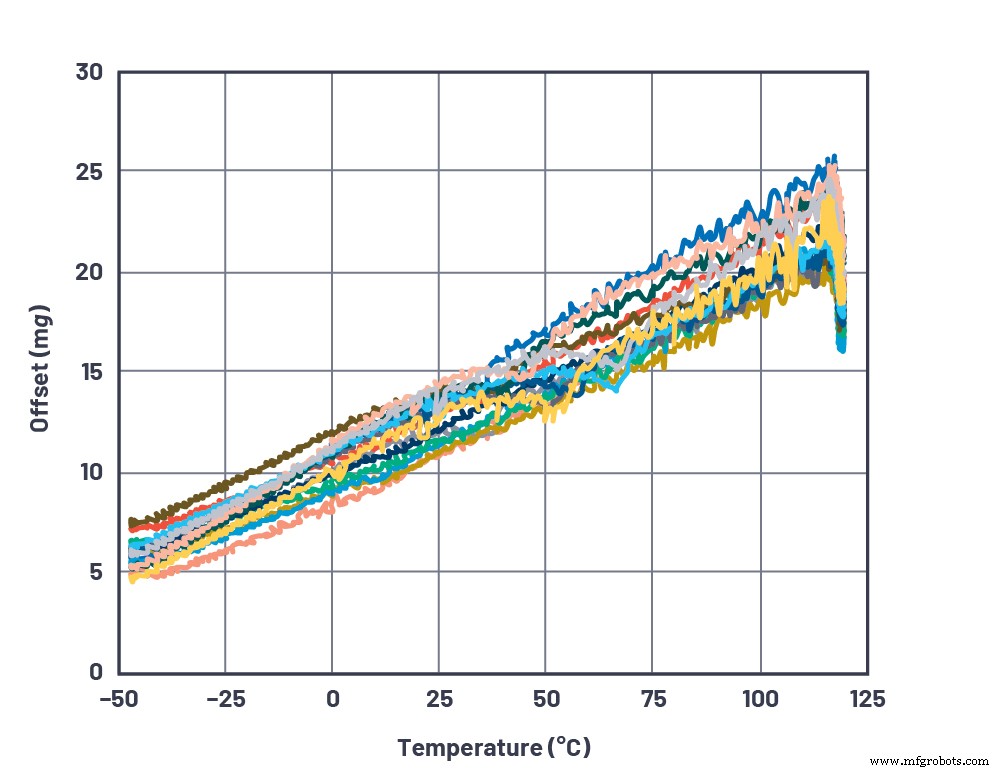
Abbildung 8. Ofenbasierte Temperaturcharakterisierung des ADXL355. (Quelle:Analog Devices)
In dieser Handlung spielen zwei Effekte eine Rolle. Eine davon ist der Offset tempco, wie er im Datenblatt charakterisiert und dokumentiert ist. Dies kann als Mittelwert vieler Teile von –45°C bis +120°C interpretiert werden, da der Ofen die Temperatur auf 5°C/min hochfährt, jedoch ohne Einweichzeit. Dies würde aus Diagrammen ähnlich denen in Abbildung 9 abgeleitet werden und etwa 18 mg . ergeben über 165 °C oder etwa 109 µg /°C, was etwas außerhalb des typischen Wertes von 100 µg . liegt /°C, jedoch innerhalb des minimalen und maximalen Bereichs wie im Datenblatt angegeben. Betrachten Sie jedoch die rechte Seite von Abbildung 9, da die Geräte etwa 15 Minuten lang bei 120 °C eingeweicht werden. Da die Geräte eine hohe Temperatur aufweisen, sinkt und verbessert sich die tatsächliche Offset-Verschiebung. In diesem Fall liegt der Mittelwert nahe bei 10 mg über 165 °C oder etwa 60 µg /°C Offsettemp. Der zweite im Spiel befindliche Effekt ist dann die unterschiedliche thermische Belastung, da sich die Temperatur der Sensorprüfmasse über das gesamte Siliziumbauelement hinweg stabilisiert und die Belastung dann reduziert wird. Dies ist der Effekt, der bei den in Abbildung 6 bis Abbildung 8 gezeigten Luftpistolentests zu sehen ist, und es ist wichtig zu verstehen, dass dieser Effekt auf einer schnelleren Zeitskala wirkt als die im Datenblatt aufgeführten längerfristigen Offset-Tempcos. Dies könnte für viele Systeme wertvoll sein, die aufgrund ihrer gesamten thermischen Dynamik wahrscheinlich eine viel langsamere Rampe als 5 °C/min aufweisen.
Im dritten Teil dieser Serie werden wir andere Fakten untersuchen, die die Stabilität beeinflussen, und dann Empfehlungen für das mechanische Systemdesign geben, um die Gesamtleistung eines 3-Achsen-Hochpräzisions-MEMS-Beschleunigungsmessers zu verbessern.
Referenzen
1 Chris Murphy. „Auswahl des am besten geeigneten MEM-Beschleunigungsmessers für Ihre Anwendung – Teil 1.“ Analoger Dialog, Bd. 51, Nr. 4, Oktober 2017.
2 Chris Murphy. "Beschleunigungsmesser-Neigungsmessung über Temperatur und in Anwesenheit von Vibrationen." Analoger Dialog, August 2017.
3 Auswertesystem SDP-K1. Analog Devices, Inc.
4 Mbed:Benutzerhandbuch für SDP-K1. Analog Devices, Inc.
5 PanaVise Gelenkarmhalterung. PanaVise.
6 Mbed-Code. Analog Devices, Inc.
7 Weller 6966C Heiz-/Kühlluftpistole. Weller.
8 Parylene. Wikipedia.
Eingebettet
- Bauen Sie Ihre Cloud-Infrastruktur für Leistung und Effizienz auf
- VersaLogic veröffentlicht Xeon-basierten Hochleistungs-Embedded-Computer
- Erfassung von IoT-Daten für Präzisionslandwirtschaft
- DATENMODUL:Großformatige Open-Frame-Monitore mit hoher Helligkeit und easyTouch-Funktion
- Sechs Innovationen zur Verbesserung der kryptografischen Hardwareleistung
- TECHWAY:Kintex-7 FPGA PCIe-Plattform zur Steigerung der Datenratenleistung mit 12 HSS-Links
- Abaco:Robustes XMC bietet 2,3 TeraFLOPS Spitzenleistung und Unterstützung für CUDA und OpenCL
- Der Geschäftsbereich Hochleistungsmaterialien von Lanxess wird rechtlich unabhängig
- Leistungsüberwachung:Herausforderungen, Lösungen und Vorteile
- Hochleistungs-CNC-Zentren mit hoher Präzision