


Bauen Sie ein drahtloses Roboterfahrzeug mit IR-Sensoren
Ein Roboter ist ein mechanischer oder virtueller künstlicher Agent, im Allgemeinen eine elektromechanische Maschine, die von einem Computerprogramm unter Verwendung einer elektronischen Schaltung gesteuert wird. Roboter können autonom oder halbautonom sein und reichen von Humanoiden wie Hondas is the advanced Step in Innovative Mobility und TOSYs. TOSY Ping-Pong-Spielroboter bis hin zu Industrierobotern, Patentassistenzrobotern, medizinischen Operationsrobotern, Hundetherapierobotern, kollektiv programmierten Schwarmrobotern und sogar mikroskopischen Nanorobotern. Durch die Darstellung eines Lebens wie eine Erscheinung oder die Automatisierung von Bewegungen kann ein Roboter ein Gefühl von Intelligenz übertragen oder allein durch. In diesem Artikel werden auf IR-Sensoren basierende drahtlose Roboterfahrzeuge behandelt.
Was ist ein drahtloses Roboterfahrzeug?
Der Roboter ist eine Technologie, die sich mit Design, Konstruktion, Betrieb und Anwendung von Robotern sowie Computersystemen befasst und zur Steuerung, sensorischen Rückmeldung und Informationsverarbeitung verwendet wird werden Roboter genannt. Diese Technologie befasst sich mit automatisierten Maschinen, die von Menschen in gefährlichen Umgebungen platziert werden können oder in Aussehen und Verhalten Menschen ähneln. Heutzutage werden Roboter von der Natur inspiriert und tragen zum Bereich der bioinspirierten Robotik bei. Diese Roboter schufen auch einen neuen Zweig der Robotik und Softrobotik. Die mechanischen Techniken, die im Industriezeitalter entwickelt wurden, gibt es mehr praktische Anwendungen wie automatisierte Maschinen, Fernbedienungen und drahtlose Fernbedienungen.

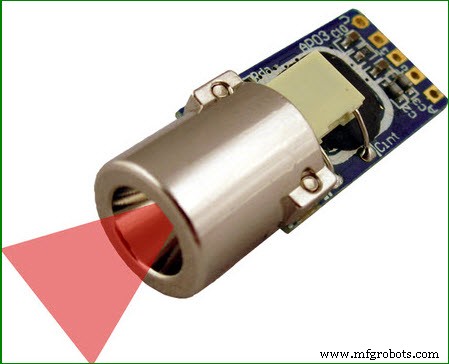
Was ist ein IR-Sensor?
Ein IR-Sensor ist ein Gerät, das emittiert, um einige Aspekte der Umgebung zu erfassen und die darauf fallende IR-Strahlung erkennt. Der Emitter ist einfach eine IR-LED (Light Emitting Diode) und der Detektor ist einfach eine IR-Photodiode, die für IR-Licht der gleichen Wellenlänge empfindlich ist, das von der IR-LED emittiert wird. Wenn IR-Licht auf die Photodiode fällt, ändern sich die Widerstände und Ausgangsspannungen proportional zur Stärke des empfangenen IR-Lichts. Es gibt viele Arten von IR-Sensoren, die gebaut werden und je nach Anwendung gebaut werden können. Kontrastsensoren (verwendet in linienfolgenden Robotern), Näherungssensoren (verwendet in Touchscreen-Telefonen) und Hindernissensoren (verwendet zum Zählen von Waren und in Einbruchmeldeanlagen) sind einige Beispiele.
Ferngesteuerter drahtloser Roboter mit Funkfrequenz
Das HF-gesteuerte drahtlose Roboterfahrzeug umfasst hauptsächlich einen HF-Sender und einen HF-Empfänger.
RF-Sender
RF-Module sind normalerweise sehr klein und arbeiten im Spannungsbereich von 3V bis 12V. HF-Sendermodule sind nur für den Betrieb mit einer Frequenz von 433 MHz ausgelegt. Wenn eine logische Null gesendet wird, wird vom Sender keine Leistung gezogen. Zum Senden ist die Logik eins, sie verbraucht etwa 4,5 mA bei 3 V. Sender und Empfänger sind mit den 8051-Mikrocontrollern verbunden und erhalten den gewünschten Betrieb. Der HF-Sender hat eine Spannung im Bereich von 3 V bis 6 V und eine Ausgangsleistung im Bereich von 4 V bis 12 V geliefert.
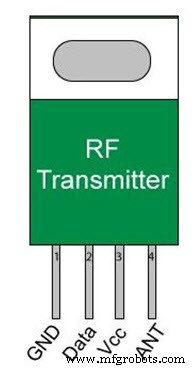
Der unten gezeigte HF-Sender-Schaltplan wird verwendet, um verschiedene Drucktasten anzuschließen, um das Roboterfahrzeug in verschiedene Richtungen wie vorwärts, rückwärts, rechts und links zu bewegen. So können wir durch Drücken des entsprechenden Druckknopfs die Bewegung des Roboterfahrzeugs steuern.
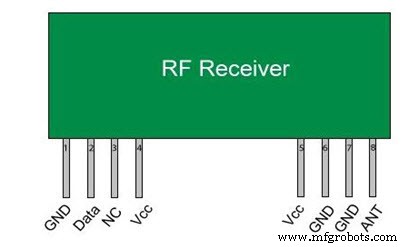
RF-Empfänger
Der HF-Empfänger ist auch klein und der HF-Empfänger hat einen Versorgungsstrom von 3,5 mA bei einer Betriebsspannung von 5 V. HF-Sendermodule sind nur für den Betrieb mit 433 MHz ausgelegt (diese sollten zu Kommunikationszwecken mit der Senderfrequenz übereinstimmen, um Signale vom Sender zu empfangen).
RF-Kommunikation mit dem Roboterfahrzeug
Radiofrequenz (RF) besteht aus einem Sender und einem Empfänger, die an einen isolierten zu steuernden Stromkreis angeschlossen sind. Vom Senderende wird ein Steuersignal in Form von Funkwellen oder elektromagnetischen Wellen übertragen, um das Gerät fernzusteuern, das mit dem Empfängerende verbunden ist. Dieses Steuersignal wird unter Verwendung von elektromagnetischen Wellen oder Radiowellen mit Hochfrequenz übertragen. Somit wird das Steuersignal am Empfängerende empfangen und erhält die genaue Ausgabe wie ein Roboterfahrzeug, ein Spezialroboter, ein Kommunikationszweckgerät usw.
RF-gesteuertes Roboterfahrzeug
Das Hauptziel dieses Projekts ist es, ein Roboterfahrzeug zu entwickeln, das von einer TV-Fernbedienung gesteuert wird. Hier verwendet das vorgeschlagene System HF-Technologie für den Fernbetrieb. Ein IR-Sensor ist mit der Steuereinheit des Roboters verbunden, um die Infrarotsignale zu erfassen, die von der Fernbedienung übertragen werden. Für den bevorzugten Betrieb wird ein Mikrocontroller der Serie 8051 verwendet.
Im Sendeabschnitt (TX) werden Drucktasten verwendet, um die Befehle an das Empfängerende zu senden, um die Bewegung des Roboters zu steuern, entweder um sich in vier Richtungen wie vorwärts, rechts, rückwärts zu bewegen und links usw. Im Empfangsbereich sind zwei Motoren mit dem Mikrocontroller der 8051-Familie verbunden, wo sie für die Bewegung des Fahrzeugs verwendet werden.

Die TV-Fernbedienung generiert RC5-basierte Daten, die von einem Infrarotempfänger empfangen werden, der mit dem Mikrocontroller verbunden ist. Das eingebaute Programm im Mikrocontroller bezieht sich auf den Code, um basierend auf den i/p-Daten eine bevorzugte Ausgabe zu erzeugen, um die Motoren über einen Motortreiber-IC zu betreiben.
Der HF-Sender fungiert als HF-Fernbedienung, die mit einer geeigneten Antenne den Vorteil einer großen Reichweite (bis zu 200 Meter) hat, während der Empfänger dekodiert, bevor er an einen anderen Mikrocontroller geliefert wird um Gleichstrommotoren über den Motortreiber-IC für die erforderliche Arbeit anzutreiben.
Außerdem kann dieses Projekt mit DTMF-Technologie erweitert werden. Mit der RF-Technologie können wir den Roboter mit einem Handy steuern. Diese Technologie hat gegenüber der HF-Technologie einen Vorteil gegenüber einer großen Kommunikationsreichweite.
Hier dreht sich also alles um IR-Sensor-basierte drahtlose Roboterfahrzeuge. Wir hoffen, dass Sie dieses Konzept besser verstehen. Wenn Sie Zweifel an diesem Konzept oder an Elektro- und Elektronikprojekten haben, geben Sie bitte Ihr Feedback im Kommentarbereich unten ab. Hier ist eine Frage an Sie, was ist die Hauptfunktion des IR-Sensors?
Sensor
- Tag zwei auf der IoT World:Smart Window Shades mit DDS noch smarter machen
- Interaktiver Laserprojektor mit Zigbee-Sensoren
- Analoge Sensoren auf dem Raspberry Pi mit einem MCP3008
- Wissen, wann Sensoren für Roboterschweißen eingesetzt werden sollten
- Die Schüler bauen ein Roboter-Müllsortiersystem mit B&R-Technologie
- Testen von Sensoren im Nebel, um zukünftige Transporte sicherer zu machen
- Imitation menschlicher Hände zur Herstellung besserer Sensoren
- Ultradünne und hochempfindliche Dehnungssensoren
- Ultradünne, batterielose Dehnungssensoren für industrielle Roboterarme
- Wie man die Elektronik von morgen mit Tintenstrahl-gedrucktem Graphen herstellt