


Regelkreise:Offen vs. Geschlossen
 Der Rückkopplungsregelkreis ist wahrscheinlich das innovativste und zuverlässigste Werkzeug im Bereich der Steuerungstechnik. Regelkreise als Ganzes sind effizient Werkzeuge, um Probleme und Probleme in einem System zu ermitteln, Sollwerte in Prozessen zu erreichen und die Stabilität eines Systems aufrechtzuerhalten. Es gibt drei Haupttypen von Regelkreissystemen:geschlossener Regelkreis, offener Regelkreis und kombinierter offener und geschlossener Regelkreis. Closed-Loop stützt sich stärker auf Feedback, während Open-Loop dies nicht tut. Combined verwendet sowohl Feedback als auch Feedforward, um einen Prozess zu stabilisieren.
Der Rückkopplungsregelkreis ist wahrscheinlich das innovativste und zuverlässigste Werkzeug im Bereich der Steuerungstechnik. Regelkreise als Ganzes sind effizient Werkzeuge, um Probleme und Probleme in einem System zu ermitteln, Sollwerte in Prozessen zu erreichen und die Stabilität eines Systems aufrechtzuerhalten. Es gibt drei Haupttypen von Regelkreissystemen:geschlossener Regelkreis, offener Regelkreis und kombinierter offener und geschlossener Regelkreis. Closed-Loop stützt sich stärker auf Feedback, während Open-Loop dies nicht tut. Combined verwendet sowohl Feedback als auch Feedforward, um einen Prozess zu stabilisieren.
Das folgende Diagramm veranschaulicht den gesamten Rückkopplungsregelkreis:
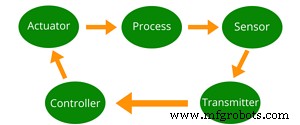
Wenn wir dies aufteilen, erhalten wir:
- Der zu kontrollierende Prozess
- Ein Sensor, der den physikalischen Parameter misst des Prozesses
- Ein Sender, der die sensorischen Informationen in elektronische Signale umwandelt
- Ein Regler, der das Signal und den Sollwert vergleicht
- Ein Aktuator, der als Reaktion auf das vom Controller gesendete Signal eine Korrektur ausführt
In einem geschlossenen Regelsystem wird der Ablauf wiederholt, bis der Sollwert erreicht ist. Einige gängige Beispiele sind das Thermostat für die Ofentemperatur oder der Tempomat in einem Auto. Dies bedeutet jedoch nicht, dass alle automatischen Vorgänge eine Rückmeldung benötigen, um ordnungsgemäß zu funktionieren. Open-Loop-Konfigurationen, die davon ausgehen, dass die Sequenz nur einmal benötigt wird, können mehrere Operationen bedienen, ohne dass ständige Bestätigungen über Feedback erforderlich sind.
Arten der Regelung
Kontinuierliche Regelung
Nicht alle Closed-Loop-Prozesse sind gleich. Bei einem kontinuierlichen Regelprozess hält die Rückkopplungsschleife den vom Benutzer eingestellten Wert der Regelgröße, auch Sollwert genannt. Der Regler führt eine einfache Subtraktion des letzten sensorischen Messwerts vom Sollwert durch. Die Größe des Ergebnisses bestimmt den Korrekturaufwand, der von der Steuerung über das Stellglied aufgebracht würde.
Beispielsweise würde ein Auto, dessen Tempomat aktiviert ist, den Tachometer als Sensor verwenden, um seine Geschwindigkeit zu messen. Wenn die Geschwindigkeit niedriger als der eingestellte Wert ist, beschleunigt der Controller das Auto, indem er mehr Kraftstoff zuführt. Wenn das Auto zu schnell fährt, wird die Kraftstoffzufuhr proportional verringert. Dieser Prozess des Messens-Entscheiden-Betätigens wird fortgesetzt, bis die Geschwindigkeit des Fahrzeugs den Sollwert erreicht.
Diskreter Regelkreis
Bei einer kontinuierlichen Regelung mit geschlossenem Regelkreis wird die interessierende Variable zu jeder Zeit gemessen, aber bei diskreten Regelsystemen würde ein auslösendes Ereignis in der Mess-Entscheidungs-Betätigungs-Sequenz resultieren. Zum Beispiel verwenden Menschen ihre Augen, um den Status des Umgebungslichts draußen vor dem Fahren zu bestimmen und ob die Scheinwerfer eingeschaltet werden sollen oder nicht. Bis zu einem auslösenden Ereignis wie einer starken Bewölkung oder der Einleitung der nächsten Fahrt sind keine weiteren Anpassungen erforderlich.
Diskrete Rückkopplungsschleifen sind viel einfacher als kontinuierliche, da sie keine kontinuierliche Überwachung oder Probleme wie scharfe Überschwinger beinhalten. Sofortige Ergebnisse werden erhalten, wenn die Scheinwerfer eingeschaltet werden, im Vergleich zu den allmählichen Ergebnissen mit Tempomat.
Open-Loop-Steuerung
Wie bereits erwähnt, gehen Open-Loop-Regler davon aus, dass der Sollwert in einem Zug erreicht wird, und wenden einen einzigen Regelaufwand an, wenn der Trigger auftritt. Diesen Controllern kann auch die Möglichkeit gegeben werden, die Ergebnisse zu messen. Hat der Motor zum Beispiel gestartet oder gestoppt? Diese Messungen dienen hauptsächlich Sicherheitsüberlegungen und sind nicht Teil des Ablaufs.
Gelegentlich kann ein Closed-Loop-Controller aufgrund eines Sensorausfalls oder einer manuellen Übernahme durch einen Bediener wie ein Open-Loop-Controller arbeiten. Der Bediener muss eingreifen, wenn ein Rückkopplungsregler seine Stabilität nicht aufrechterhalten kann. Beispielsweise kann ein starker Druckregler einen Abfall des Leitungsdrucks möglicherweise nicht richtig kompensieren, was zu häufigen Überschwingungen und Oszillationen führt. In diesen Fällen muss der Bediener manuell die Kontrolle übernehmen, um das System zu stabilisieren.
Es gibt auch mehrere Prozesse, für die stabile Steuerungen zu schwierig zu konfigurieren sind und sehr häufig erfahrene Bediener übernehmen müssen. Bediener können ihre Erfahrung nutzen, um die Prozesseingänge zu manipulieren und den gewünschten Sollwert viel schneller als die Steuerung aufrechtzuerhalten. Dies ist jedoch nicht die ideale Situation bei der Verwendung von Regelkreisen. Was würde also passieren, wenn Steuerungen mit offenem und geschlossenem Regelkreis kombiniert würden?
Kombination von offenen und geschlossenen Regelkreisen
Die Steuerung mit offenem Regelkreis bringt den Nachteil der Ungenauigkeit mit sich, da das Entfernen des Rückkopplungsanteils auch die Garantie für den Steuerungsaufwand aufhebt, der den erforderlichen Steuerungsaufwand erbringt. Steuerungen mit offenem und geschlossenem Regelkreis können zu einer Feedforward-Strategie kombiniert werden, wenn Schnelligkeit und Genauigkeit parallel gefordert sind.
Ein Feedforward-Regler baut auf einem mathematischen Modell des Prozesses auf, so dass alle Kontrollbemühungen denen eines erfahrenen Ingenieurs ähneln, der im manuellen Modus arbeitet. Es misst die Ergebnisse der anfänglichen Open-Loop-Bemühungen und wendet weitere Korrekturen an, um Fehler zu beseitigen und den Sollwert zu erreichen. Diese Art von Controller ist praktisch, wenn die richtigen Sensoren zur Verfügung stehen, um eine Vielzahl von Kriterien zu messen. Wenn seine zukünftigen Auswirkungen vorhergesagt werden können, kann der Controller präventive Schritte unternehmen, um sicherzustellen, dass der Fehler innerhalb kürzester Zeit behoben wird.
Wenn ein Auto zum Beispiel sowohl mit einem Radar als auch mit einem Tempomat ausgestattet ist, könnte es einen Hügel sehen und beschleunigen, um die zusätzliche Kraft auszugleichen, die erforderlich ist, um den Hügel hinaufzufahren. Ohne die Vorankündigung würde der Tempomat niemals wissen, dass er beschleunigen muss, was dazu führen würde, dass der geschlossene Regelkreis Korrekturmaßnahmen anwendet, bis der Sollwert wieder erreicht ist.
Jede Art von Regelkreis hat ihre Anwendungen. Die Open-Loop-Steuerung eignet sich am besten für Situationen, in denen der Sollwert auf einen Schlag erreichbar ist. Geschlossene Regelkreise eignen sich am besten für Situationen, in denen Versuch und Irrtum erforderlich sind, um den Sollwert zu erreichen. Und die kombinierte Steuerung und Regelung erfordert mathematische Modelle und manchmal Sensoren, um richtig zu funktionieren. Die Auswahl an Optionen ermöglicht es dem Bediener, den richtigen Regelkreis für seine Anforderungen auszuwählen.
Die Rolle des Schutzes bei der Gewährleistung der Langlebigkeit von Maschinen
Wie man Controller einordnet
Automatisierungssteuerung System
- Phasenregelkreise
- Steuerkreise
- Neon A Shop Open/Closed Makerspace Sign auf Raspberry Pi 2 (El Paso, TX)
- Offener CV-Roboter
- Bessere Möglichkeiten zur Fehlerbehebung bei Automatisierungs- und Prozessregelkreisen
- Vorteile der industriellen Steuerungskonvergenz
- Wachstum des Marktes für Niederspannungssteuerung
- Überleben eines Steuerungssystem-Migrationsprojekts
- Industrielle Schalttafeln verstehen
- Grundlagen des Bedienfelddesigns