


Synchrone Zähler
Was ist ein synchrones Zähler?
Ein synchroner Zähler , im Gegensatz zu einem asynchronen Zähler , ist einer, dessen Ausgangsbits gleichzeitig ohne Welligkeit den Zustand ändern.
Die einzige Möglichkeit, eine solche Zählerschaltung aus J-K-Flip-Flops zu bauen, besteht darin, alle Takteingänge miteinander zu verbinden, so dass jedes einzelne Flip-Flop genau denselben Takt zur exakt gleichen Zeit empfängt:
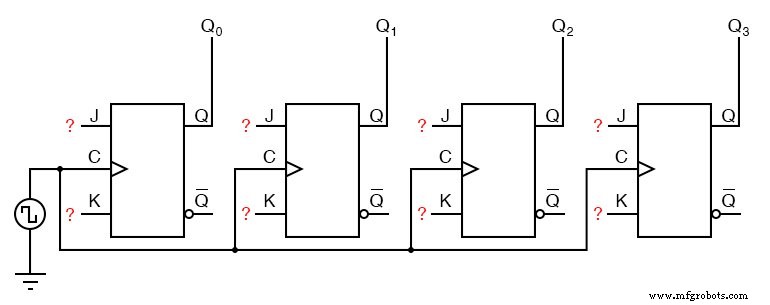
Die Frage ist nun, was machen wir mit den Eingängen J und K? Wir wissen, dass wir immer noch das gleiche durch zwei teilende Frequenzmuster beibehalten müssen, um in einer binären Folge zu zählen, und dass dieses Muster am besten mit dem "Toggle" -Modus des Flip-Flops erreicht wird Die Eingänge J und K müssen beide (zeitweise) „hoch“ sein, ist klar.
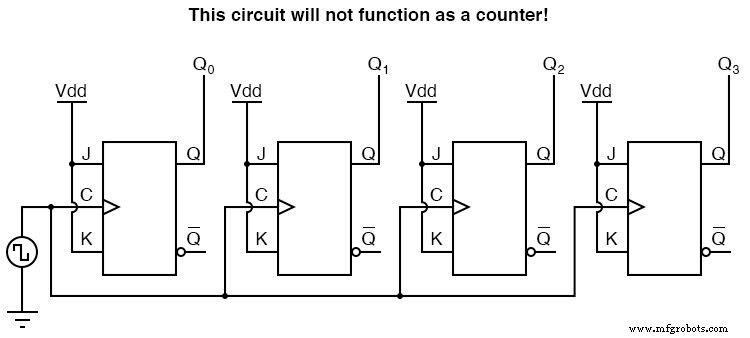
Wenn wir jedoch einfach alle J- und K-Eingänge mit der positiven Schiene des Netzteils verbinden, wie wir es in der asynchronen Schaltung getan haben, würde dies offensichtlich nicht funktionieren, da alle Flip-Flops gleichzeitig umschalten würden:bei jedem Taktimpuls!
Lassen Sie uns die binäre Vier-Bit-Zählsequenz noch einmal untersuchen und sehen, ob es andere Muster gibt, die das Umschalten eines Bits vorhersagen.
Das Design der asynchronen Zählerschaltung basiert auf der Tatsache, dass jeder Bitwechsel gleichzeitig mit dem Umschalten des vorhergehenden Bits von „High“ auf „Low“ (von 1 auf 0) erfolgt.
Da wir das Umschalten eines Bits nicht basierend auf dem Umschalten eines vorherigen Bits in einer synchronen Zählerschaltung takten können (dies würde einen Welleneffekt erzeugen), müssen wir ein anderes Muster in der Zählsequenz finden, das verwendet werden kann, um ein Bit auszulösen umschalten:
Bei der Untersuchung der binären Vier-Bit-Zählsequenz ist ein weiteres Vorhersagemuster zu erkennen.
Beachten Sie, dass kurz vor dem Umschalten eines Bits alle vorhergehenden Bits „high“ sind:
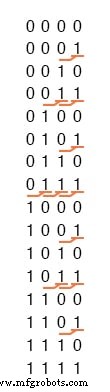
Dieses Muster können wir auch beim Entwerfen einer Zählerschaltung ausnutzen.
Synchron „Aufwärts“-Zähler
Wenn wir jedes JK-Flip-Flop aktivieren, um abhängig davon umzuschalten, ob alle vorhergehenden Flip-Flop-Ausgänge (Q) „hoch“ sind oder nicht, können wir dieselbe Zählsequenz wie die asynchrone Schaltung ohne den Welligkeitseffekt erhalten, da jedes Flip-Flop in dieser Schaltung wird exakt zur gleichen Zeit getaktet:
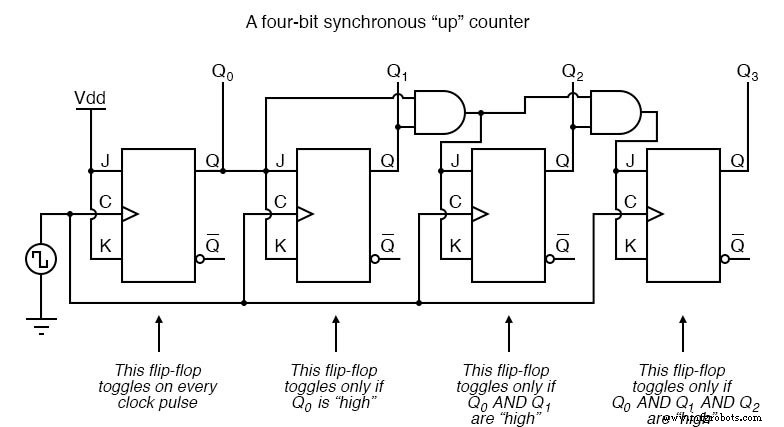
Das Ergebnis ist ein 4-Bit-synchrones Zähler „hoch“. Jedes der Flip-Flops höherer Ordnung wird zum Umschalten bereit gemacht (sowohl J- als auch K-Eingänge „high“), wenn die Q-Ausgänge aller vorherigen Flip-Flops „high“ sind.
Andernfalls sind die Eingänge J und K für dieses Flip-Flop beide „low“, wodurch es in den „Latch“-Modus versetzt wird, in dem es beim nächsten Taktimpuls seinen aktuellen Ausgangszustand beibehält.
Da das erste (LSB) Flip-Flop bei jedem Takt umschalten muss, sind seine J- und K-Eingänge mit Vcc . verbunden oder Vdd , wo sie die ganze Zeit „high“ sein werden.
Das nächste Flip-Flop muss nur „erkennen“, dass der Q-Ausgang des ersten Flip-Flops hoch ist, um zum Umschalten bereit zu sein, sodass kein UND-Gatter benötigt wird.
Die verbleibenden Flip-Flops sollten jedoch erst dann zum Umschalten vorbereitet werden, wenn alle Ausgangsbits niedrigerer Ordnung sind „hoch“, daher sind UND-Gatter erforderlich.
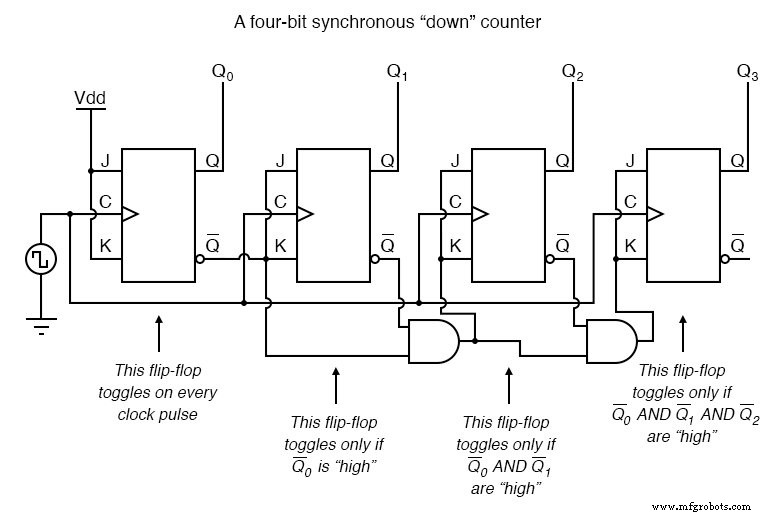
Synchroner „Abwärts“-Zähler
Um einen synchronen „Abwärts“-Zähler zu erstellen, müssen wir die Schaltung so aufbauen, dass sie die entsprechenden Bitmuster erkennt, die jeden Umschaltzustand beim Herunterzählen vorhersagen.
Es überrascht nicht, dass wir bei der Untersuchung der binären Vier-Bit-Zählsequenz sehen, dass alle vorhergehenden Bits vor einem Umschalten „niedrig“ sind (der Sequenz von unten nach oben folgend):

Da jedes JK-Flip-Flop mit einem Q'-Ausgang sowie einem Q-Ausgang ausgestattet ist, können wir die Q'-Ausgänge verwenden, um den Toggle-Modus an jedem nachfolgenden Flip-Flop zu aktivieren, da jedes Q' jedes Mal „high“ ist Zeitpunkt, zu dem das jeweilige Q „niedrig“ ist:
Zählerschaltung mit wählbaren „Auf“- und „Abwärts“-Zählmodi
Wenn wir diese Idee noch einen Schritt weiterführen, können wir eine Zählerschaltung mit wählbarem "Aufwärts"- und "Abwärts"-Zählmodus aufbauen, indem wir zwei Leitungen von UND-Gattern haben, die die entsprechenden Bitbedingungen für eine "Aufwärts"- und eine "Abwärts"-Zählsequenz erkennen. Verwenden Sie dann ODER-Gatter, um die UND-Gatter-Ausgänge mit den J- und K-Eingängen jedes nachfolgenden Flip-Flops zu kombinieren:
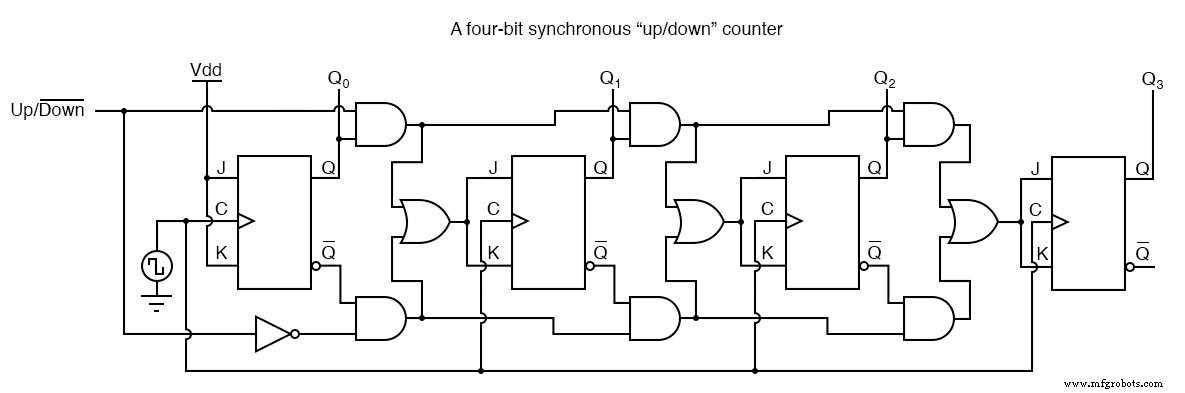
Diese Schaltung ist nicht so komplex, wie es auf den ersten Blick erscheinen mag. Die Up/Down-Steuereingangsleitung ermöglicht einfach, dass entweder die obere Reihe oder die untere Reihe von UND-Gattern die Q/Q’-Ausgänge an die nachfolgenden Stufen der Flip-Flops weitergeben.
Wenn die Up/Down-Steuerleitung „high“ ist, werden die oberen UND-Gatter aktiviert und die Schaltung funktioniert genauso wie die erste („up“) synchrone Zählerschaltung, die in diesem Abschnitt gezeigt wird.
Wenn die Up/Down-Steuerleitung auf „low“ gesetzt wird, werden die unteren UND-Gatter aktiviert und die Schaltung funktioniert identisch mit der zweiten („down“-Zähler) Schaltung, die in diesem Abschnitt gezeigt wird.
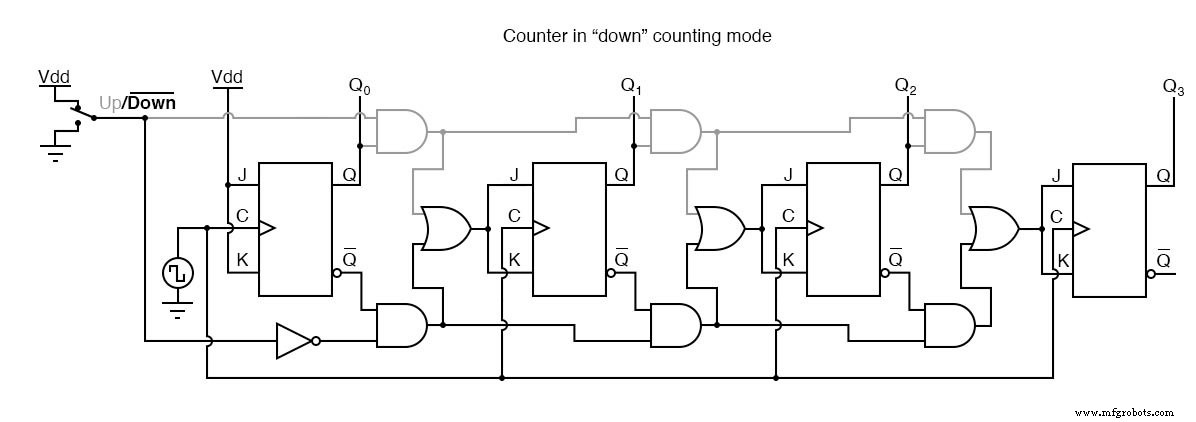
Zur Veranschaulichung hier ein Diagramm, das die Schaltung im „Aufwärts“-Zählmodus zeigt (alle deaktivierten Schaltungen sind grau statt schwarz dargestellt):

Hier im „Abwärts“-Zählmodus, mit derselben grauen Farbe für deaktivierte Schaltkreise:
Auf/Ab-Zählerschaltungen sind sehr nützliche Geräte. Eine häufige Anwendung ist die Bewegungssteuerung von Maschinen, bei der Geräte namens Drehwellen-Encoder wandeln die mechanische Drehung in eine Reihe von elektrischen Impulsen um, wobei diese Impulse eine Zählerschaltung „takten“, um die Gesamtbewegung zu verfolgen:
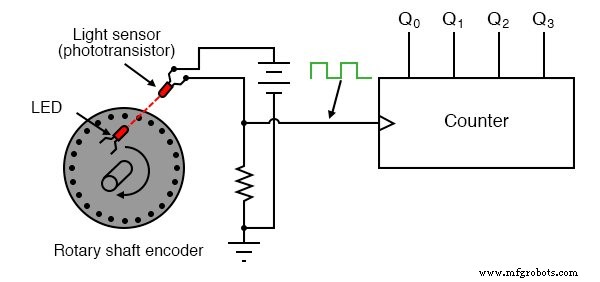
Während sich die Maschine bewegt, dreht sie die Encoderwelle, wodurch der Lichtstrahl zwischen LED und Fototransistor erzeugt und unterbrochen wird, wodurch Taktimpulse zum Inkrementieren der Zählerschaltung erzeugt werden.
Somit integriert oder akkumuliert der Zähler die Gesamtbewegung der Welle und dient als elektronische Anzeige dafür, wie weit sich die Maschine bewegt hat.
Wenn wir uns nur darum kümmern, die Gesamtbewegung zu verfolgen und Änderungen in der Richtung nicht berücksichtigen möchten der Bewegung reicht diese Anordnung aus.
Wenn wir jedoch möchten, dass der Zähler inkrementiert mit einer Bewegungsrichtung und Abnahme bei umgekehrter Bewegungsrichtung müssen wir einen Aufwärts-/Abwärtszähler und eine Kodierer-/Dekodierungsschaltung verwenden, die zwischen verschiedenen Richtungen unterscheiden kann.
Wenn wir den Encoder so umgestalten, dass er zwei Sätze von LED/Fototransistor-Paaren hat, werden diese Paare so ausgerichtet, dass ihre Rechteckwellenausgangssignale 90 o . betragen phasenverschoben haben wir einen sogenannten Quadraturausgang Encoder (das Wort „Quadratur“ bezieht sich einfach auf einen 90 o Winkelabstand).
Eine Phasendetektionsschaltung kann aus einem D-Flip-Flop bestehen, um eine Pulsfolge im Uhrzeigersinn von einer Pulsfolge gegen den Uhrzeigersinn zu unterscheiden:
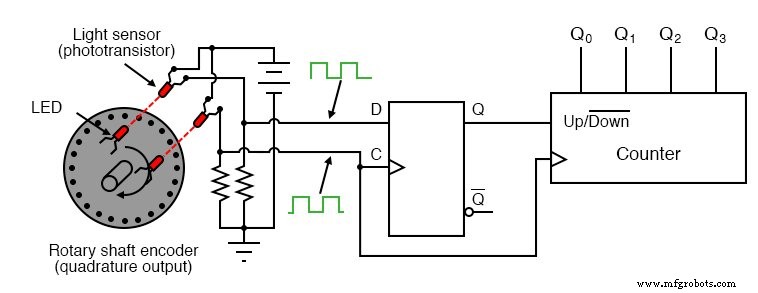
Wenn sich der Encoder im Uhrzeigersinn dreht, eilt die Rechteckwelle des „D“-Eingangssignals der Rechteckwelle des „C“-Eingangs voraus, was bedeutet, dass der „D“-Eingang bereits „high“ ist, wenn „C“ von „low“ auf . übergeht „hoch“, also Einstellung das D-Flip-Flop (das den Q-Ausgang „hoch“ macht) bei jedem Taktimpuls.
Ein „hoher“ Q-Ausgang versetzt den Zähler in den „Aufwärts“-Zählmodus, und alle Taktimpulse, die der Taktgeber vom Encoder (von einer der beiden LEDs) empfängt, werden ihn inkrementieren.
Umgekehrt, wenn der Encoder die Drehung umkehrt, bleibt der „D“-Eingang hinter der „C“-Eingangswellenform zurück, d -Flip-Flop in den Reset eingeben Zustand (wodurch der Q-Ausgang „low“ wird) bei jedem Taktimpuls.
Dieses „niedrige“ Signal befiehlt der Zählerschaltung, mit jedem Taktimpuls vom Encoder zu dekrementieren.
Diese oder ähnliche Schaltung ist das Herzstück jeder Positionsmessschaltung auf Basis eines Impulsgebers.
Solche Anwendungen sind in der Robotik, CNC-Werkzeugmaschinensteuerung und anderen Anwendungen, die die Messung von reversiblen mechanischen Bewegungen beinhalten, sehr verbreitet.
VERWANDTE ARBEITSBLÄTTER:
- Arbeitsblatt für synchrone Zähler
Industrietechnik