


Computerschaltungen
Wenn jemand das Wort „Computer“ erwähnt, denkt man normalerweise an ein digitales Gerät. Digitale Schaltungen repräsentieren numerische Größen in binär Format:Muster von Einsen und Nullen, die durch eine Vielzahl von Transistorschaltungen dargestellt werden, die in gesättigten oder abgeschalteten Zuständen arbeiten. Es können jedoch auch analoge Schaltungen verwendet werden, um numerische Größen darzustellen und mathematische Berechnungen durchzuführen, indem variable Spannungssignale anstelle von diskreten Ein-/Aus-Zuständen verwendet werden.
Hier ist ein einfaches Beispiel für die binäre (digitale) Darstellung im Vergleich zur analogen Darstellung der Zahl „fünfundzwanzig“:
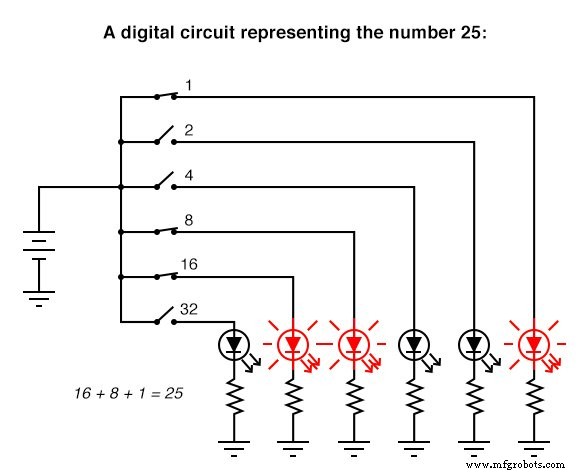
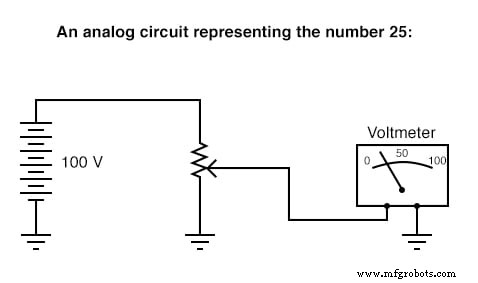
Digitale Schaltungen unterscheiden sich stark von Schaltungen, die auf analogen Prinzipien aufgebaut sind. Digitale Rechenschaltungen können unglaublich komplex sein, und Berechnungen müssen oft in aufeinanderfolgenden „Schritten“ durchgeführt werden, um eine endgültige Antwort zu erhalten, ähnlich wie ein Mensch arithmetische Berechnungen in Schritten mit Bleistift und Papier durchführen würde. Analoge Rechenschaltungen hingegen sind im Vergleich recht einfach und führen ihre Berechnungen kontinuierlich in Echtzeit durch. Die Verwendung analoger Schaltungen zur Darstellung von Zahlen hat jedoch einen Nachteil:Ungenauigkeit. Die oben gezeigte digitale Schaltung repräsentiert genau die Zahl fünfundzwanzig. Die oben gezeigte analoge Schaltung kann auf 25.000 Volt genau kalibriert sein oder nicht, sie unterliegt jedoch „Drift“ und Fehlern.
In Anwendungen, bei denen Präzision nicht entscheidend ist, sind analoge Rechenschaltungen sehr praktisch und elegant. Hier sind einige Operationsverstärkerschaltungen für die Durchführung analoger Berechnungen gezeigt:
Computergestützte Operationsverstärkerschaltungen
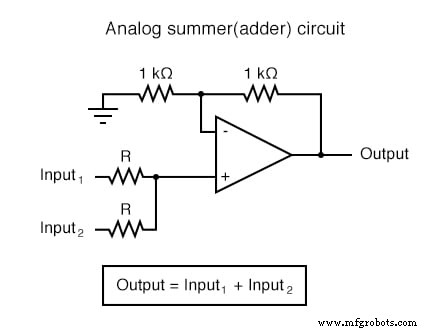
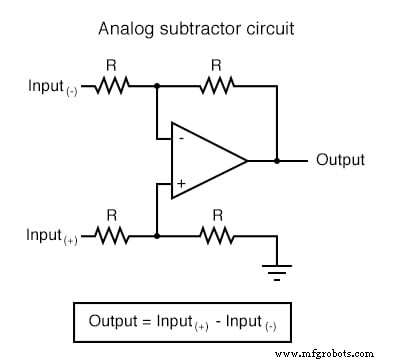
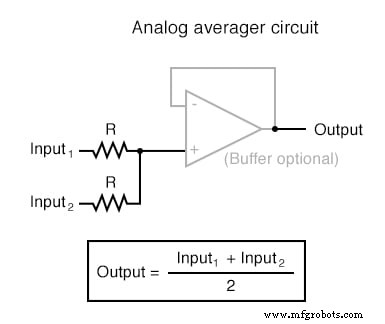
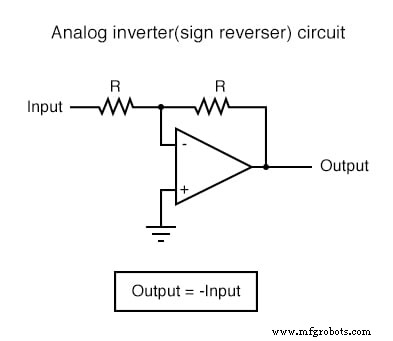
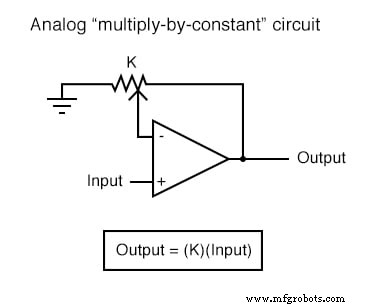
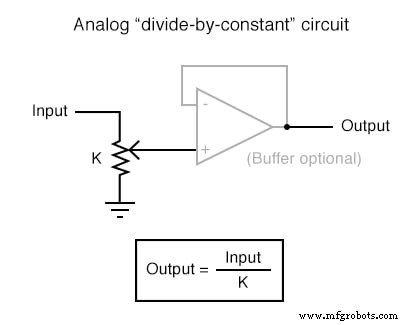
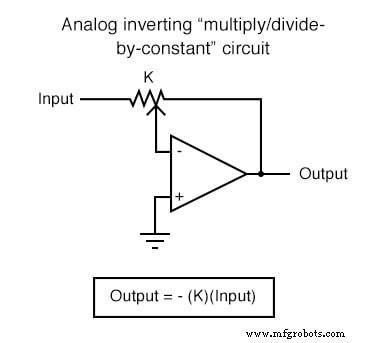
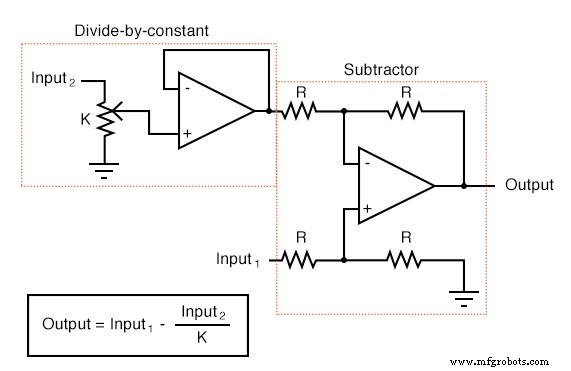
Jede dieser Schaltungen kann auf modulare Weise verwendet werden, um eine Schaltung zu schaffen, die zu mehreren Berechnungen fähig ist. Nehmen wir zum Beispiel an, wir müssten einen bestimmten Bruchteil einer Variablen von einer anderen Variablen subtrahieren. Durch Kombinieren einer Division-durch-Konstante-Schaltung mit einer Subtrahiererschaltung könnten wir die erforderliche Funktion erhalten:
Geräte namens analoge Computer war früher in Universitäten und Ingenieurbüros üblich, wo Dutzende von Operationsverstärkerschaltungen mit abnehmbaren Überbrückungsdrähten „gepatcht“ werden konnten, um mathematische Aussagen zu modellieren, normalerweise zum Zweck der Simulation eines physikalischen Prozesses, dessen zugrunde liegende Gleichungen bekannt waren. Digitale Computer haben analoge Computer so gut wie überholt, aber analoge Rechenschaltungen sind in Bezug auf Eleganz und Wirtschaftlichkeit der notwendigen Komponenten nicht von digitalen zu schlagen.
Analoge Rechenschaltungen zeichnen sich durch die Ausführung der Rechenoperationen Integration aus und Unterscheidung in Bezug auf die Zeit durch Verwendung von Kondensatoren in einer Op-Amp-Rückkopplungsschleife. Um die Funktionsweise und Anwendungen dieser Schaltungen vollständig zu verstehen, müssen wir jedoch zuerst die Bedeutung dieser grundlegenden Konzepte der Infinitesimalrechnung verstehen. Glücklicherweise ist die Anwendung von Operationsverstärkerschaltungen auf reale Probleme mit Infinitesimalrechnung ein hervorragendes Mittel, um grundlegende Infinitesimalrechnungen zu lehren. Mit den Worten von John I. Smith aus seinem hervorragenden Lehrbuch Modern Operational Circuit Design :
"Einige Leser werden ermuntert:Die Integralrechnung ist eine der mathematischen Disziplinen, die Operationsschaltkreise ausnutzen und dabei eher als Barriere für das Verständnis abbauen." (S. 4)
Die Meinung von Herrn Smith zum pädagogischen Wert analoger Schaltungen als Lernwerkzeug für die Mathematik ist nicht einzigartig. Betrachten Sie die Meinung des Ingenieurs George Fox Lang in einem Artikel, den er für die August-2000-Ausgabe der Zeitschrift Sound and Vibration geschrieben hat , mit dem Titel „Analog war nicht eine Computermarke!”:
„Das Erstellen einer realen physikalischen Einheit (einer Schaltung), die von einem bestimmten Satz von Gleichungen gesteuert wird, und die Interaktion damit bietet einzigartige Einblicke in diese mathematischen Aussagen. Es gibt keinen besseren Weg, ein „Bauchgefühl“ für das Zusammenspiel von Physik und Mathematik zu entwickeln, als ein solches Zusammenspiel zu erleben. Der analoge Computer war ein leistungsstarkes interdisziplinäres Lehrwerkzeug; seine Veralterung wird von vielen Pädagogen in einer Vielzahl von Bereichen betrauert.“ (S. 23)
Differenzierung ist die erste Operation, die typischerweise von Anfängern der Analysis gelernt wird. Einfach ausgedrückt bestimmt die Differenzierung die momentane Änderungsrate einer Variablen in Bezug auf eine andere. In analogen Differenziererschaltungen ist die unabhängige Variable die Zeit, und daher sind die Änderungsraten, mit denen wir es zu tun haben, Änderungsraten für ein elektronisches Signal (Spannung oder Strom) in Bezug auf die Zeit.
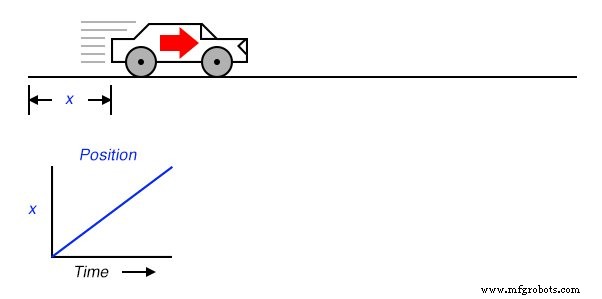
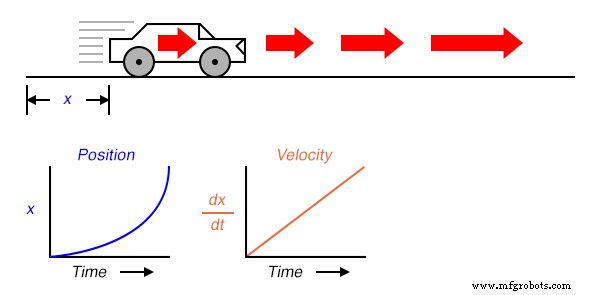
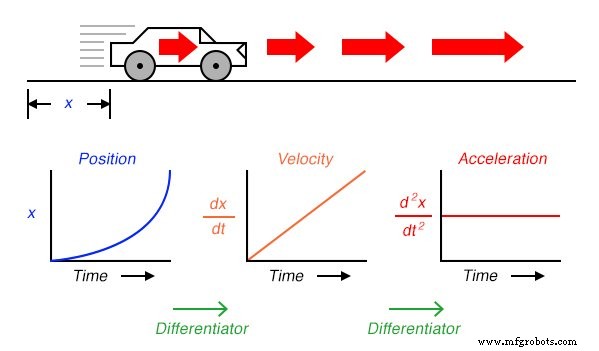
Angenommen, wir würden die Position eines Autos messen, das auf direktem Weg (keine Abbiegungen) von seinem Ausgangspunkt fährt. Nennen wir diese Messung x . Wenn sich das Auto mit einer solchen Geschwindigkeit bewegt, dass seine Entfernung vom „Start“ im Laufe der Zeit stetig zunimmt, wird seine Position in einem Diagramm als linear . dargestellt Funktion (gerade Linie):
Wenn wir die Ableitung berechnen würden der Position des Autos in Bezug auf die Zeit (d. h. die Änderungsrate der Position des Autos in Bezug auf die Zeit bestimmen), würden wir zu einer Größe kommen, die die Geschwindigkeit des Autos repräsentiert. Die Differenzierungsfunktion wird durch die Bruchschreibweise d/d . dargestellt , also bei der Positionsdifferenzierung (x ) in Bezug auf die Zeit (t ), bezeichnen wir das Ergebnis (die Ableitung) als dx/dt :
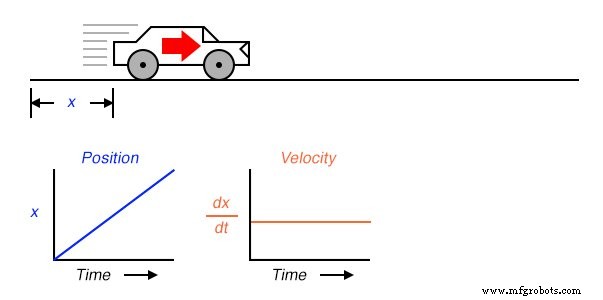
Für einen linearen Graphen von x über die Zeit die Ableitung der Position (dx/dt ), sonst und häufiger bekannt als Geschwindigkeit , wird eine flache Linie sein, deren Wert unveränderlich ist. Die Ableitung einer mathematischen Funktion kann grafisch als ihre Steigung verstanden werden wenn es in einem Diagramm aufgetragen wird, und hier können wir sehen, dass die Position (x ) Graph hat eine konstante Steigung, was bedeutet, dass seine Ableitung (dx/dt ) muss über die Zeit konstant sein.
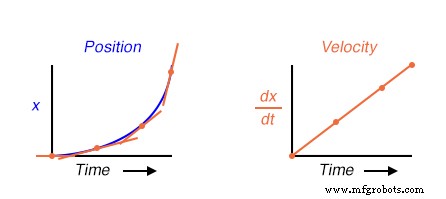
Nehmen wir nun an, dass die von dem Auto zurückgelegte Strecke im Laufe der Zeit exponentiell zugenommen hat:Das heißt, es begann seine Fahrt in langsamen Bewegungen, legte jedoch mit jedem verstreichenden Zeitabschnitt mehr zusätzliche Strecke zurück. Wir würden dann sehen, dass die Ableitung der Position (dx/dt ), auch bekannt als Geschwindigkeit (v ), wäre im Laufe der Zeit nicht konstant, sondern würde zunehmen:
Die Höhe der Punkte im Geschwindigkeitsdiagramm entspricht den Änderungsraten oder der Steigung von Punkten zu entsprechenden Zeitpunkten im Positionsdiagramm:
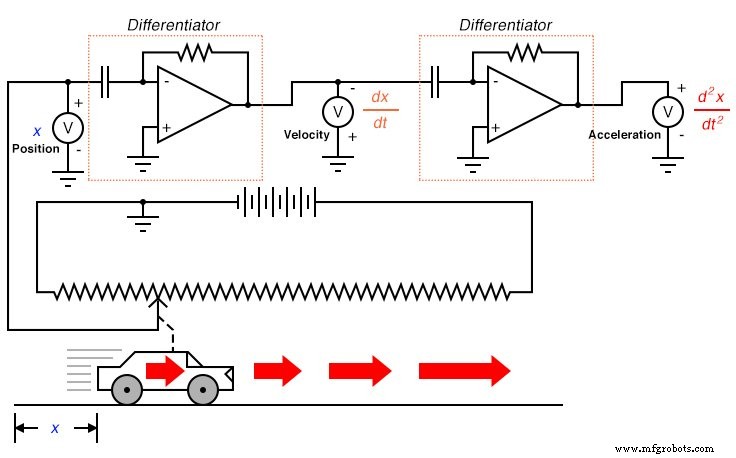
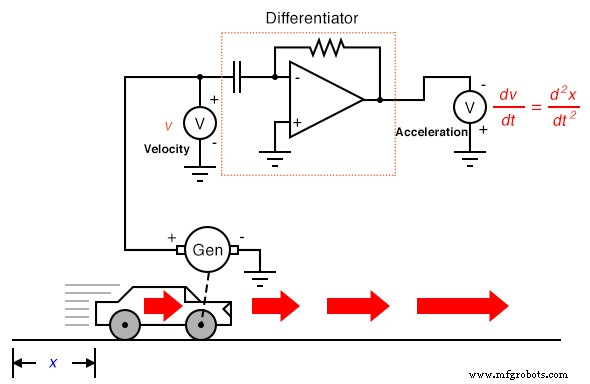
Was hat das mit analogen elektronischen Schaltungen zu tun? Nun, wenn wir ein analoges Spannungssignal haben würden, das die Position des Autos repräsentiert (denken Sie an ein riesiges Potentiometer, dessen Scheibenwischer am Auto befestigt ist und eine Spannung proportional zur Position des Autos erzeugt), könnten wir eine Differenzierschaltung an dieses Signal anschließen und haben die Schaltung kontinuierlich berechnen die Geschwindigkeit des Autos und zeigt das Ergebnis über ein Voltmeter an, das an den Ausgang der Differenzierschaltung angeschlossen ist:
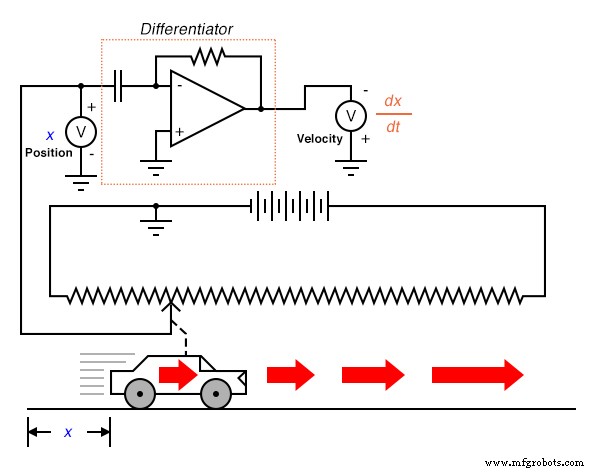
Erinnern Sie sich an das letzte Kapitel, dass eine Differenzierschaltung eine Spannung proportional zur Änderungsrate der Eingangsspannung über die Zeit ausgibt (d/dt ). Wenn sich also die Eingangsspannung im Laufe der Zeit mit einer konstanten Rate ändert , hat die Ausgangsspannung einen konstanten Wert. Wenn sich das Auto so bewegt, dass sich seine zurückgelegte Strecke im Laufe der Zeit konstant aufbaut, bedeutet dies, dass das Auto mit konstanter Geschwindigkeit fährt und die Differenzierschaltung eine konstante Spannung proportional zu dieser Geschwindigkeit ausgibt. Wenn sich die zurückgelegte Strecke des Fahrzeugs im Laufe der Zeit nicht stetig ändert, wird der Ausgang der Differenzierschaltung ebenfalls instationär sein, jedoch immer auf einem Niveau, das für die Änderungsrate des Eingangs im Laufe der Zeit repräsentativ ist.
Beachten Sie, dass das Voltmeter, das die Geschwindigkeit (am Ausgang der Differenzierschaltung) registriert, in „umgekehrter“ Polarität mit dem Ausgang des Operationsverstärkers verbunden ist. Dies liegt daran, dass die gezeigte Differenzierschaltung invertiert . ist :Ausgeben einer negativen Spannung für eine positive Eingangsspannungsänderungsrate. Wenn wir möchten, dass das Voltmeter einen positiven Wert für die Geschwindigkeit registriert, muss es wie gezeigt an den Operationsverstärker angeschlossen werden. So unpraktisch es auch sein mag, ein riesiges Potentiometer mit einem sich bewegenden Objekt wie einem Auto zu verbinden, das Konzept sollte klar sein:Durch die elektronische Ausführung der Differentialrechnungsfunktion eines die Position repräsentierenden Signals erhalten wir ein Signal, das die Geschwindigkeit repräsentiert.
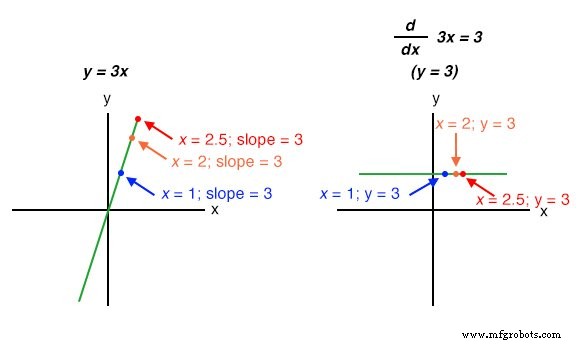
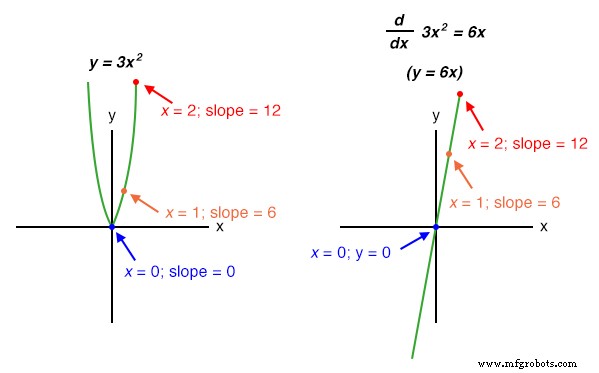
Anfänger in der Infinitesimalrechnung lernen symbolische Techniken zur Differenzierung. Dies erfordert jedoch, dass die Gleichung, die den ursprünglichen Graphen beschreibt, bekannt ist. Zum Beispiel lernen Mathematikstudenten, eine Funktion wie y =3x . zu verwenden und finde seine Ableitung nach x (d/dx ), 3 , einfach durch Manipulation der Gleichung. Wir können die Genauigkeit dieser Manipulation überprüfen, indem wir die Graphen der beiden Funktionen vergleichen:
Nichtlineare Funktionen wie y =3x 2 kann auch durch symbolische Mittel unterschieden werden. In diesem Fall ist die Ableitung von y =3x 2 in Bezug auf x ist 6x :
Im wirklichen Leben können wir das Verhalten eines physikalischen Ereignisses jedoch oft nicht durch eine einfache Gleichung wie y =3x . beschreiben , und so kann es unmöglich sein, eine symbolische Differenzierung des Typs, der von Mathematikstudenten erlernt wird, auf eine physikalische Messung anzuwenden. Wenn jemand die Ableitung der Position unseres hypothetischen Autos bestimmen möchte (dx/dt =Geschwindigkeit) mit symbolischen Mitteln, müssten sie zunächst eine Gleichung aufstellen, die die Position des Autos im Zeitverlauf beschreibt, basierend auf Positionsmessungen aus einem realen Experiment – eine fast unmögliche Aufgabe, es sei denn, das Auto wird unter sorgfältig kontrollierten Bedingungen betrieben, was zu einer sehr einfachen Positionsdiagramm. Eine analoge Differenzierschaltung jedoch unter Ausnutzung des Verhaltens eines Kondensators in Bezug auf Spannung, Strom und Zeit i =C(dv/dt) , unterscheidet natürlich jedes reale Signal nach der Zeit und könnte ein Signal ausgeben, das der Momentangeschwindigkeit entspricht (dx/dt ) jeder Zeit. Durch die Aufzeichnung des Positionssignals des Fahrzeugs zusammen mit dem Ausgangssignal des Differenzierers mit einem Kartenschreiber oder einem anderen Datenerfassungsgerät würden sich beide Diagramme natürlich zur Inspektion und Analyse präsentieren.
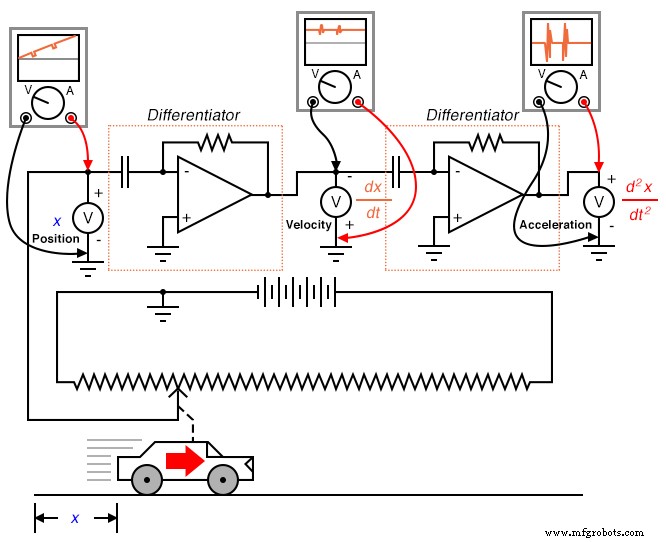
Wir können das Prinzip der Differenzierung noch einen Schritt weiterführen, indem wir es mit einer anderen Differenzierschaltung auf das Geschwindigkeitssignal anwenden. Mit anderen Worten, verwenden Sie es, um die Geschwindigkeitsänderungsrate zu berechnen, von der wir wissen, dass sie die Positionsänderungsrate ist. Zu welchem praktischen Maß würden wir kommen, wenn wir dies täten? Stellen Sie sich dies in Bezug auf die Einheiten vor, die wir verwenden, um Position und Geschwindigkeit zu messen. Wenn wir die Position des Autos von seinem Startpunkt in Meilen messen würden, würden wir wahrscheinlich seine Geschwindigkeit in Meilen pro Stunde ausdrücken (dx/dt ). Wenn wir die Geschwindigkeit (gemessen in Meilen pro Stunde) nach der Zeit differenzieren würden, würden wir am Ende die Einheit Meilen pro Stunde pro Stunde . erhalten . Im Einführungsunterricht in Physik lernen die Schüler das Verhalten von fallenden Objekten und die Positionsmessung in Metern , Geschwindigkeit in Meter pro Sekunde , und Änderung der Geschwindigkeit im Zeitverlauf in Meter pro Sekunde, pro Sekunde . Diese letzte Maßnahme heißt Beschleunigung :Geschwindigkeitsänderungsrate über die Zeit:
Der Ausdruck d 2 x/dt 2 heißt die zweite Ableitung der Position (x ) bezüglich der Zeit (t ). Wenn wir an den Ausgang des ersten eine zweite Differenzierschaltung anschließen würden, würde das letzte Voltmeter die Beschleunigung registrieren:
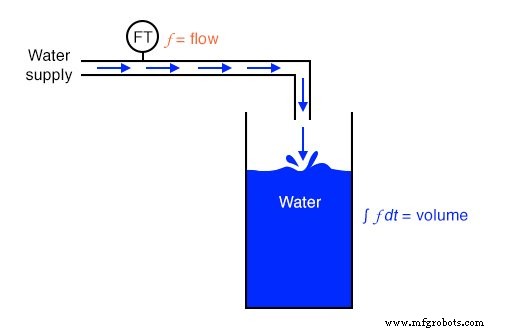
Wenn wir die Geschwindigkeit aus der Position und die Beschleunigung aus der Geschwindigkeit ableiten, sehen wir das Prinzip der Differentiation sehr deutlich veranschaulicht. Dies sind nicht die einzigen physikalischen Messungen, die auf diese Weise miteinander verbunden sind, aber sie sind vielleicht die häufigsten. Ein weiteres Beispiel für Calculus in Aktion ist die Beziehung zwischen dem Flüssigkeitsfluss (q ) und Flüssigkeitsvolumen (v ) im Laufe der Zeit in einem Gefäß angesammelt:
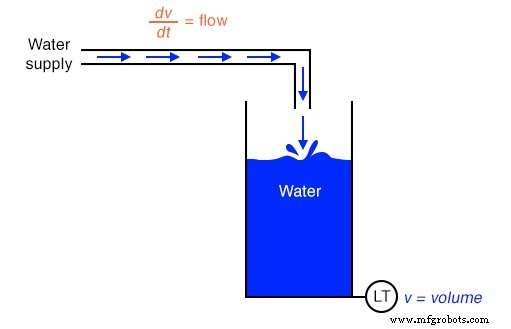
Ein an einem Wasserspeicher montiertes „Level Transmitter“-Gerät liefert ein Signal, das direkt proportional zum Wasserstand im Tank ist, das – wenn der Tank über seine gesamte Höhe eine konstante Querschnittsfläche hat – direkt der gespeicherten Wassermenge entspricht. Wenn wir dieses Lautstärkesignal nehmen und nach der Zeit differenzieren (dv/dt ), würden wir ein Signal proportional zur Durchflussmenge des Wassers erhalten durch das wasserführende Rohr zum Tank. Ein so angeschlossener Differenziererkreis, der dieses Volumensignal empfängt, würde ein durchflussproportionales Ausgangssignal erzeugen, das möglicherweise ein in der Rohrleitung installiertes Durchflussmessgerät („Durchflussgeber“) ersetzt.
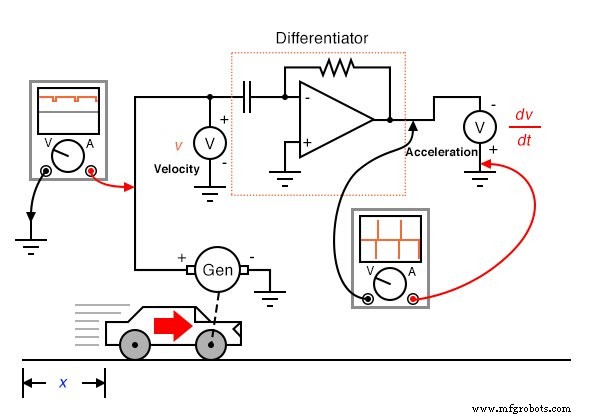
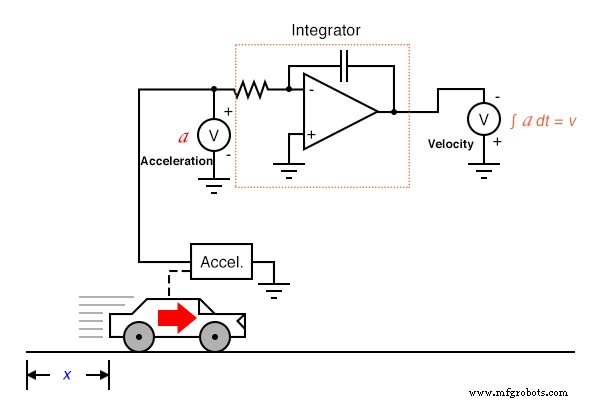
Zurück zum Autoexperiment:Nehmen wir an, unser hypothetisches Auto sei mit einem Tachogenerator an einem der Räder ausgestattet, der ein Spannungssignal direkt proportional zur Geschwindigkeit erzeugt. Wir könnten das Signal differenzieren, um eine Beschleunigung mit einer Schaltung zu erhalten, wie folgt:
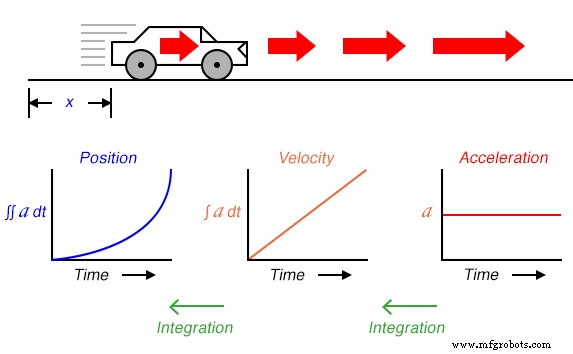
Von Natur aus differenziert der Tachogenerator die Position des Fahrzeugs in Bezug auf die Zeit und erzeugt eine Spannung, die proportional dazu ist, wie schnell sich die Winkelposition des Rads im Laufe der Zeit ändert. Dies liefert uns ein Rohsignal, das bereits für die Geschwindigkeit repräsentativ ist, wobei nur ein einziger Differenzierungsschritt erforderlich ist, um ein Beschleunigungssignal zu erhalten. Ein Tachogenerator, der die Geschwindigkeit misst, ist natürlich ein weitaus praktischeres Beispiel für die Instrumentierung eines Automobils als ein riesiges Potentiometer, das seine physikalische Position misst, aber was wir an Praktikabilität gewinnen, verlieren wir bei der Positionsmessung. Egal wie oft wir differenzieren, wir können niemals aus einem Geschwindigkeitssignal auf die Position des Autos schließen. Wenn uns der Differenzierungsprozess von Position zu Geschwindigkeit zu Beschleunigung führte, dann müssen wir irgendwie den „umgekehrten“ Differenzierungsprozess durchführen, um von Geschwindigkeit zu Position zu gelangen. Es gibt einen solchen mathematischen Prozess, der als Integration bezeichnet wird . Die „Integrator“-Schaltung kann verwendet werden, um diese Funktion der Integration in Bezug auf die Zeit auszuführen:
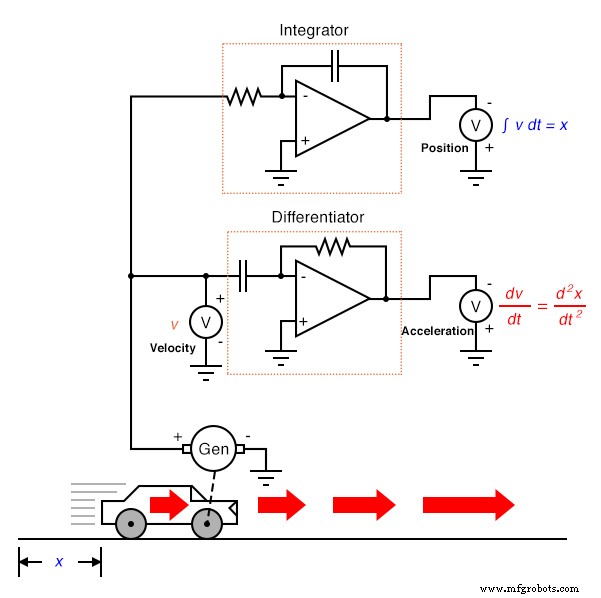
Erinnern Sie sich an das letzte Kapitel, dass eine Integratorschaltung eine Spannung ausgibt, deren zeitliche Änderungsrate proportional zur Größe der Eingangsspannung ist. Bei einer konstanten Eingangsspannung wird sich die Ausgangsspannung daher ändern mit konstanter Rate . Wenn das Auto mit konstanter Geschwindigkeit fährt (konstante Spannungseingabe in die Integratorschaltung vom Tachogenerator), dann wird seine zurückgelegte Strecke im Laufe der Zeit stetig größer und der Integrator gibt eine sich stetig ändernde Spannung proportional zu dieser Strecke aus. Wenn die Geschwindigkeit des Autos nicht konstant ist, wird die Änderungsrate über die Zeit auch nicht der Ausgang der Integratorschaltung sein, aber die Ausgangsspannung wird geben die vom Auto zu einem bestimmten Zeitpunkt zurückgelegte Strecke getreu wieder.
Das Symbol für Integration sieht in etwa wie ein sehr schmaler, kursiver Buchstabe „S“ (∫) aus. Die Gleichung, die dieses Symbol verwendet (∫v dt =x ) sagt uns, dass wir die Geschwindigkeit integrieren (v ) bezüglich der Zeit (dt ) und Ermitteln der Position (x ) als Ergebnis.
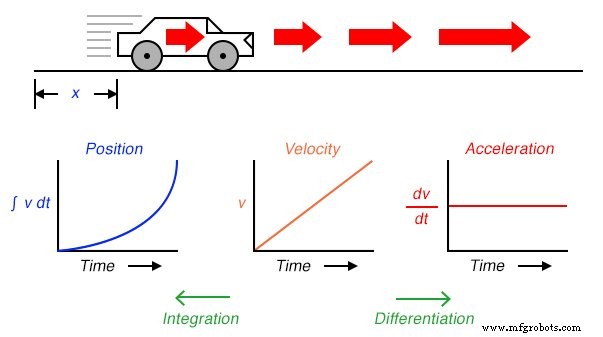
Wir können also drei Maße für die Bewegung des Autos (Position, Geschwindigkeit und Beschleunigung) als Geschwindigkeit (v ) so einfach wie möglich in Bezug auf die Position (x ):
Wenn wir einen Beschleunigungsmesser am Auto angebracht hätten, der ein Signal proportional zur Beschleunigungs- oder Verzögerungsrate erzeugt, könnten wir (hypothetisch) ein Geschwindigkeitssignal mit einem Integrationsschritt und ein Positionssignal mit einem zweiten Integrationsschritt erhalten:
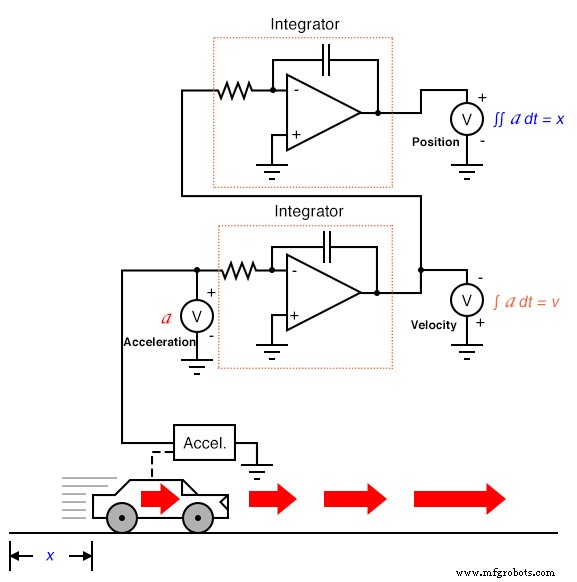
Somit können alle drei Messungen der Fahrzeugbewegung (Position, Geschwindigkeit und Beschleunigung) als Beschleunigung ausgedrückt werden:
Wie Sie vielleicht vermutet haben, kann der Integrationsprozess auch in anderen physischen Systemen veranschaulicht und auf diese angewendet werden. Nehmen Sie zum Beispiel den zuvor gezeigten Wasserspeichertank und das Durchflussbeispiel. Wenn die Durchflussrate das Derivat ist des Tankvolumens in Abhängigkeit von der Zeit (q =dv/dt ), dann könnten wir auch sagen, dass Volumen das Integral . ist der Durchflussmenge in Abhängigkeit von der Zeit:
Wenn wir einen „Flow Transmitter“-Gerät zur Messung des Wasserdurchflusses verwenden würden, könnten wir durch Zeitintegration das im Laufe der Zeit im Tank angesammelte Wasservolumen berechnen. Obwohl es theoretisch möglich ist, eine kapazitive Op-Amp-Integratorschaltung zu verwenden, um ein Volumensignal aus einem Durchflusssignal abzuleiten, sind mechanische und digitale elektronische „Integrator“-Geräte besser für die Integration über lange Zeiträume geeignet und werden häufig im Wasser verwendet Behandlungs- und Vertriebsindustrie.
So wie es symbolische Techniken der Differenzierung gibt, gibt es auch symbolische Techniken der Integration, wenn auch in der Regel komplexer und vielfältiger. Die Anwendung der symbolischen Integration auf ein reales Problem wie die Beschleunigung eines Autos hängt jedoch immer noch von der Verfügbarkeit einer Gleichung ab, die das gemessene Signal präzise beschreibt – oft schwer oder unmöglich, aus gemessenen Daten abzuleiten. Elektronische Integratorschaltungen führen diese mathematische Funktion jedoch kontinuierlich, in Echtzeit und für jede Eingangssignalprofil und bietet damit ein leistungsstarkes Werkzeug für Wissenschaftler und Ingenieure.
Allerdings gibt es Vorbehalte gegenüber der Verwendung von Kalkültechniken, um eine Art von Messung von einer anderen abzuleiten. Die Differenzierung hat die unerwünschte Tendenz, das in der Messgröße gefundene „Rauschen“ zu verstärken, da das Rauschen typischerweise als Frequenzen erscheint, die viel höher sind als die der Messgröße, und hohe Frequenzen naturgemäß hohe zeitliche Änderungsraten aufweisen.
Um dieses Problem zu veranschaulichen, nehmen wir an, wir leiten eine Messung der Fahrzeugbeschleunigung aus dem Geschwindigkeitssignal ab, das von einem Tachogenerator mit abgenutzten Bürsten oder Kommutatorstäben erhalten wird. Schlechte Kontaktstellen zwischen Bürste und Kommutator führen zu kurzzeitigen „Einbrüchen“ in der Ausgangsspannung des Tachogenerators, und die daran angeschlossene Differenzierschaltung interpretiert diese Einbrüche als sehr schnelle Geschwindigkeitsänderungen. Für ein Auto, das sich mit konstanter Geschwindigkeit bewegt – weder beim Beschleunigen noch beim Abbremsen – sollte das Beschleunigungssignal 0 Volt betragen, aber „Rauschen“ im Geschwindigkeitssignal, das durch einen fehlerhaften Tachogenerator verursacht wird, führt dazu, dass das differenzierte (Beschleunigungs-)Signal „Spitzen“ enthält, die fälschlicherweise anzeigen kurze Phasen hoher Beschleunigung und Verzögerung:
Die in einem zu unterscheidenden Signal vorhandene Rauschspannung braucht keine signifikante Amplitude zu haben, um Probleme zu verursachen:Alles, was erforderlich ist, ist, dass das Rauschprofil schnelle Anstiegs- oder Abfallzeiten aufweist. Mit anderen Worten, jedes elektrische Rauschen mit einem hohen dv/dt Komponente wird problematisch, wenn sie differenziert wird, selbst wenn sie eine geringe Amplitude hat.
Es sollte beachtet werden, dass dieses Problem kein Artefakt (ein idiosynkratischer Fehler des Mess-/Recheninstruments) der analogen Schaltung ist; sie ist vielmehr dem Differenzierungsprozess inhärent. Egal wie wir die Differenzierung durchführen, „Rauschen“ im Geschwindigkeitssignal wird das Ausgangssignal unweigerlich verfälschen. Wenn wir ein Signal zweimal differenzieren, wie wir es getan haben, um sowohl Geschwindigkeit als auch Beschleunigung aus einem Positionssignal zu erhalten, wird das von der ersten Differenziererschaltung ausgegebene verstärkte Rauschsignal natürlich wieder durch den nächsten Differenzierer verstärkt, wodurch das Problem verschlimmert wird:
Die Integration leidet nicht unter diesem Problem, da Integratoren als Tiefpassfilter wirken und hochfrequente Eingangssignale dämpfen. Tatsächlich werden alle hohen und niedrigen Spitzen, die sich aus dem Rauschen des Signals ergeben, über die Zeit gemittelt, um ein verringertes Nettoergebnis zu erzielen. Man könnte also annehmen, dass wir alle Schwierigkeiten vermeiden könnten, indem wir die Beschleunigung direkt messen und dieses Signal integrieren, um die Geschwindigkeit zu erhalten; im Prinzip „umgekehrt“ wie oben beschrieben berechnen:
Leider könnte uns die Befolgung dieser Methodik zu anderen Schwierigkeiten führen, von denen eine ein übliches Artefakt von analogen Integratorschaltungen ist, bekannt als Drift . Alle Operationsverstärker haben einen gewissen Eingangsvorspannungsstrom, und dieser Strom führt dazu, dass sich zusätzlich zu der Ladung, die sich als Ergebnis des Eingangsspannungssignals ansammelt, eine Ladung auf dem Kondensator ansammelt. Mit anderen Worten, alle analogen Integratorschaltungen leiden unter der Tendenz, dass ihre Ausgangsspannung selbst dann „driftet“ oder „kriecht“, wenn absolut kein Spannungseingang vorhanden ist, wodurch sich im Laufe der Zeit Fehler ansammeln. Außerdem neigen unvollkommene Kondensatoren dazu, ihre gespeicherte Ladung im Laufe der Zeit aufgrund des Innenwiderstands zu verlieren, was zu einem „Driften“ in Richtung Nullausgangsspannung führt. Diese Probleme sind Artefakte der analogen Schaltung und können durch die Verwendung digitaler Berechnungen eliminiert werden.
Ungeachtet der Schaltungsartefakte können sich mögliche Fehler aus der Integration einer Messung (wie Beschleunigung) ergeben, um eine andere (wie Geschwindigkeit) zu erhalten, einfach aufgrund der Art und Weise, wie die Integration funktioniert. Wenn der „Null“-Kalibrierungspunkt des Rohsignalsensors nicht perfekt ist, gibt er selbst unter Bedingungen, in denen er nichts ausgeben sollte, ein leichtes positives oder negatives Signal aus. Betrachten Sie ein Auto mit einem nicht perfekt kalibrierten Beschleunigungsmesser oder einem, der von der Schwerkraft beeinflusst wird, um eine leichte Beschleunigung zu erkennen, die nichts mit der Autobewegung zu tun hat. Selbst bei einem perfekt integrierenden Computer führt dieser Sensorfehler dazu, dass der Integrator Fehler akkumuliert, was zu einem Ausgangssignal führt, das eine Geschwindigkeitsänderung anzeigt, wenn das Auto weder beschleunigt noch verzögert.
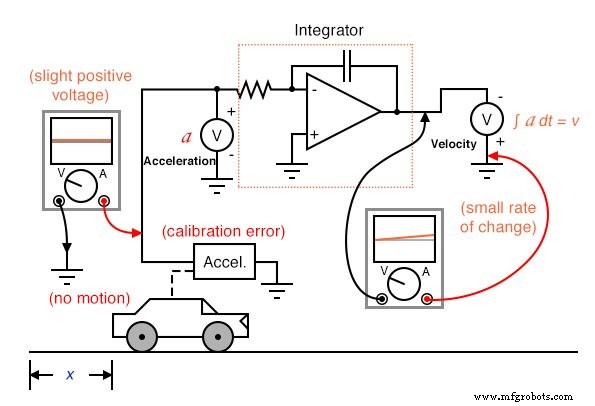
Wie bei der Differentiation verstärkt sich dieser Fehler auch, wenn das integrierte Signal an eine andere Integratorschaltung weitergegeben wird, da der "driftende" Ausgang des ersten Integrators sehr bald ein signifikant positives oder negatives Signal für den nächsten zu integrierenden Integrator darstellen wird. Daher ist bei der Integration von Sensorsignalen Vorsicht geboten:wenn der „Null“-Abgleich des Sensors nicht perfekt , driftet das integrierte Ergebnis, selbst wenn die Integratorschaltung selbst perfekt ist.
Bisher waren die einzigen besprochenen Integrationsfehler künstlicher Natur:Sie stammen von Unvollkommenheiten in der Schaltung und den Sensoren. Es gibt auch eine Fehlerquelle, die dem Integrationsprozess selbst inhärent ist, und das ist die unbekannte Konstante Problem. Anfänger in der Analysis lernen, dass immer, wenn eine Funktion integriert wird, eine unbekannte Konstante existiert (normalerweise dargestellt als Variable C ) zum Ergebnis hinzugefügt. Diese Unsicherheit ist am einfachsten zu verstehen, wenn man die Ableitungen mehrerer Funktionen vergleicht, die sich nur durch die Addition eines konstanten Wertes unterscheiden:
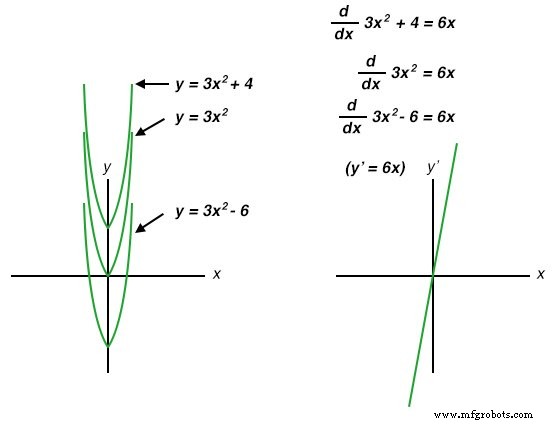
Beachten Sie, wie jede der parabolischen Kurven (y =3x 2 + C ) haben die exakt gleiche Form und unterscheiden sich in ihrem vertikalen Versatz. Sie teilen jedoch alle die exakt gleiche Ableitungsfunktion:y’ =(d/dx)( 3x 2 + C) =6x , weil sie alle die gleichen Änderungsraten aufweisen (Steigungen) an entsprechenden Stellen entlang des x Achse. Während dies aus der Perspektive der Differentiation (verschiedene Gleichungen mit einer gemeinsamen Ableitung) ganz natürlich erscheint und erwartet wird, erscheint es Anfängern aus der Perspektive der Integration in der Regel seltsam, da es mehrere richtige Antworten für das Integral einer Funktion gibt. Wenn wir von einer Gleichung zu ihrer Ableitung gehen, gibt es nur eine Antwort, aber wenn wir von dieser Ableitung zurück zur ursprünglichen Gleichung gehen, gelangen wir zu einer Reihe von richtigen Lösungen. Zu Ehren dieser Unsicherheit wird die symbolische Funktion der Integration als unbestimmtes Integral bezeichnet .
Wenn ein Integrator eine Live-Signalintegration in Bezug auf die Zeit durchführt, ist die Ausgabe die Summe des integrierten Eingangssignals über die Zeit und ein Anfangswert beliebiger Größe, der die bereits vorhandene Ausgabe des Integrators zum Zeitpunkt des Integrationsbeginns darstellt. Wenn ich zum Beispiel die Geschwindigkeit eines Autos integriere, das in einer geraden Linie von einer Stadt wegfährt, ergibt die Berechnung, dass eine konstante Geschwindigkeit von 80 Meilen pro Stunde über einen Zeitraum von 2 Stunden eine Distanz (∫v dt ) von 100 Meilen bedeutet dies nicht unbedingt, dass das Auto nach 2 Stunden 100 Meilen von der Stadt entfernt ist. Alles, was es uns sagt, ist, dass das Auto 100 Meilen weiter sein wird weg von der Stadt nach 2 Stunden Fahrt. Die tatsächliche Entfernung von der Stadt nach 2 Stunden Fahrt hängt davon ab, wie weit das Auto zu Beginn der Integration von der Stadt entfernt war. Wenn wir diesen Anfangswert für die Entfernung nicht kennen, können wir die genaue Entfernung des Autos von der Stadt nach 2 Stunden Fahrt nicht bestimmen.
Das gleiche Problem tritt auf, wenn wir die Beschleunigung in Bezug auf die Zeit integrieren, um die Geschwindigkeit zu erhalten:
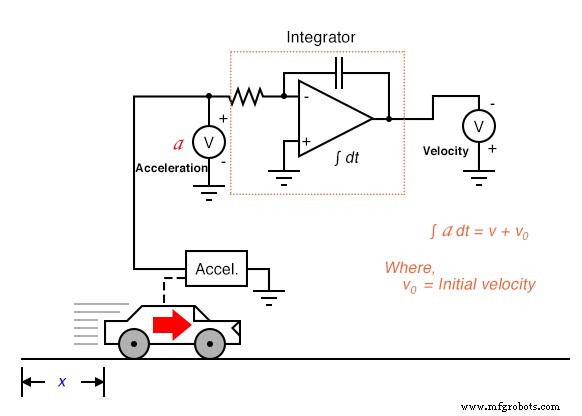
In diesem Integratorsystem ist die berechnete Geschwindigkeit des Autos nur gültig, wenn die Integratorschaltung initialisiert ist auf einen Ausgabewert von Null, wenn das Auto steht (v =0). Andernfalls könnte der Integrator sehr wohl ein von Null verschiedenes Signal für die Geschwindigkeit ausgeben (v0 ), wenn das Auto steht, denn der Beschleunigungsmesser kann den Unterschied zwischen einem stationären Zustand (0 Meilen pro Stunde) und einem Zustand konstanter Geschwindigkeit (z. B. 60 Meilen pro Stunde, unverändert) nicht erkennen. Diese Unsicherheit in der Integratorausgabe ist dem Integrationsprozess inhärent und kein Artefakt der Schaltung oder des Sensors.
Zusammenfassend ist es am besten, diese Variable direkt zu messen, anstatt sie aus anderen Messungen zu berechnen, wenn maximale Genauigkeit für eine physikalische Messung gewünscht wird. Das soll nicht heißen, dass die Berechnung wertlos ist. Im Gegenteil, oft ist es das einzige praktikable Mittel, um eine gewünschte Messung zu erhalten. Die Grenzen der Berechnung müssen jedoch verstanden und respektiert werden, um genaue Messungen zu erhalten.
VERWANDTES ARBEITSBLATT:
- Arbeitsblatt für lineare Computerschaltungen
Industrietechnik