


Arduino 3D-gedruckter Roboterarm
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
| |||
 |
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
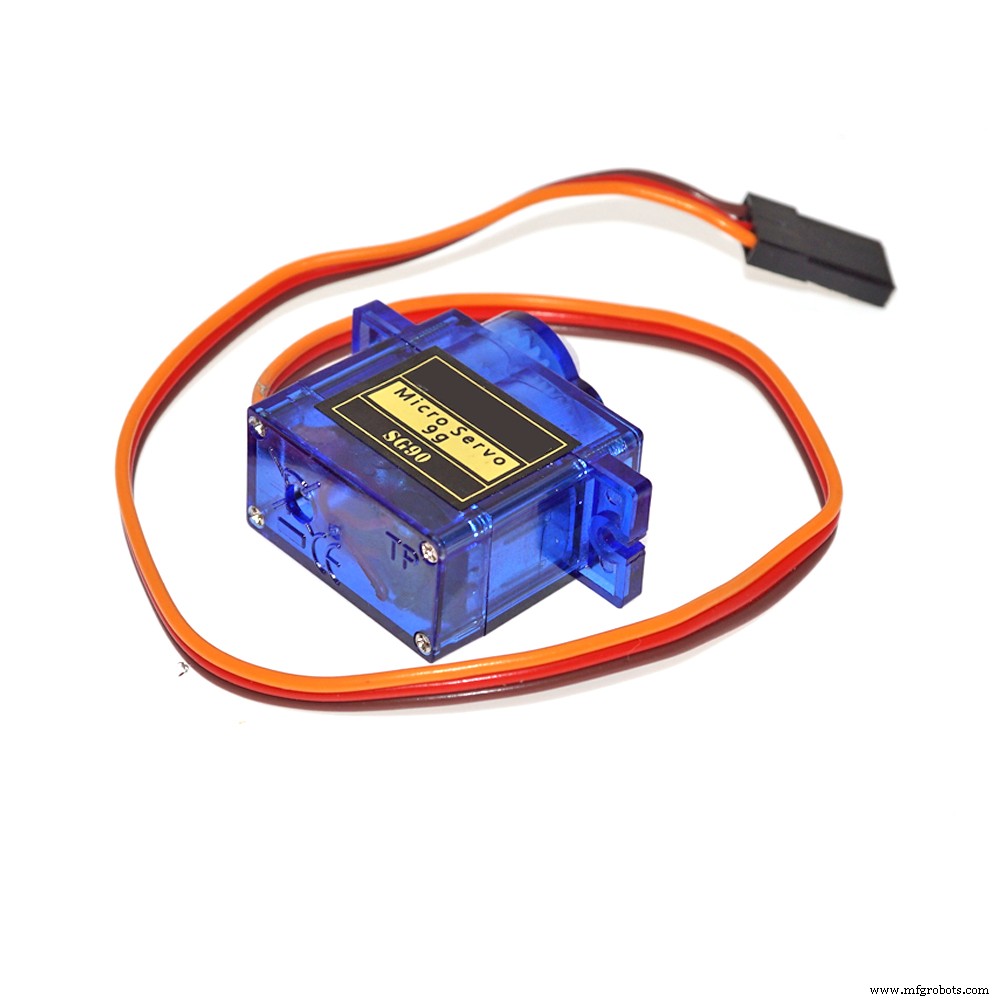
Dieses Projekt verwendet 4 Stück. billige SSG 90 Servomotoren, die von der Arduino-Platine angetrieben werden. Sie können .stl-Dateien für den 3D-Druck über den unten angegebenen Link oder direkt in das Thingiverse-Web herunterladen
https://www.thingiverse.com/thing:1015238
wo Sie detailliertere Anweisungen zur Herstellung dieses Roboterarms finden.
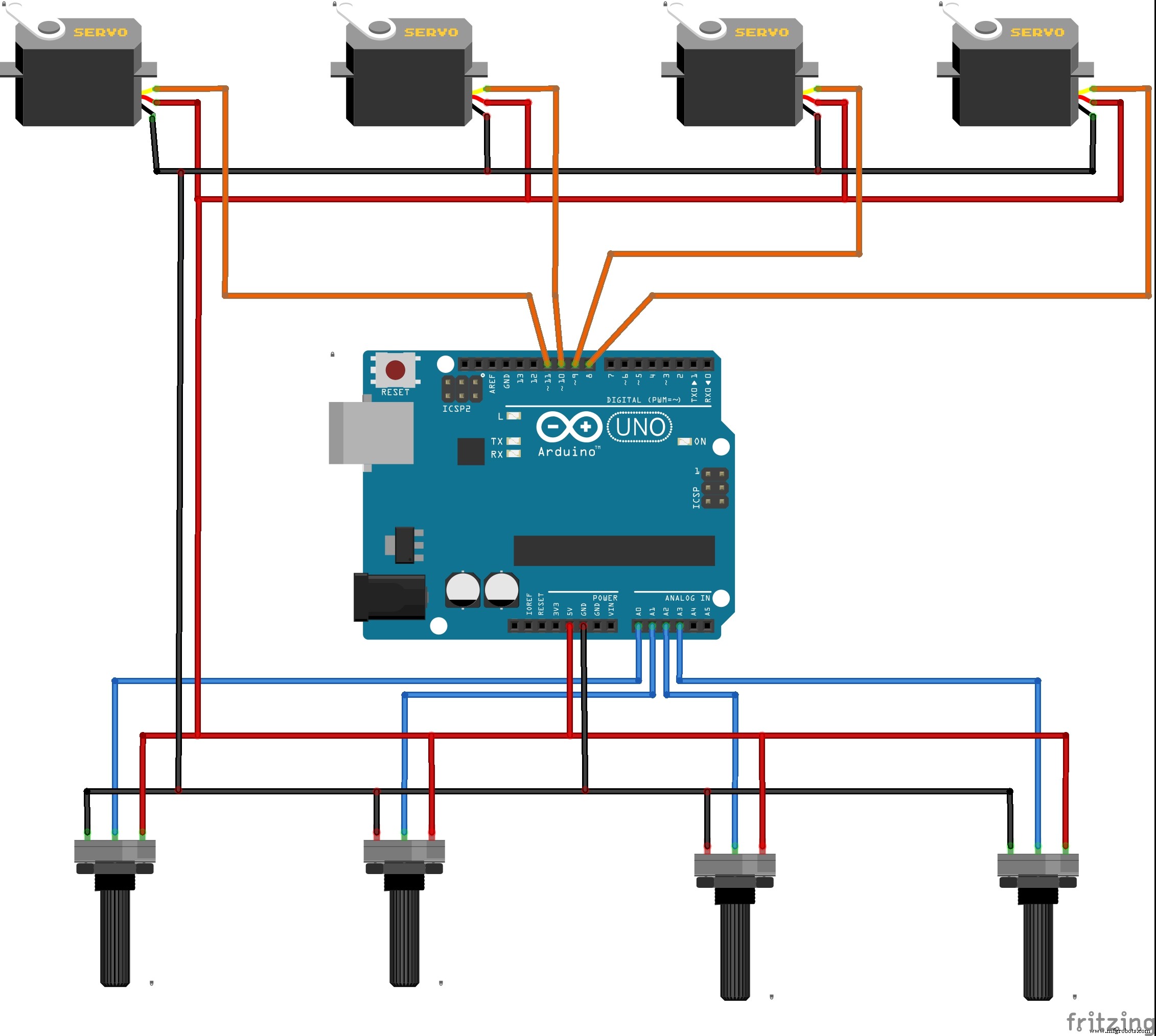
Wie bereits erwähnt, werden die Servomotoren vom Arduino-Board angetrieben. Dazu habe ich auch einen einfachen Code geschrieben, damit jedes Servo über ein passendes Potentiometer angesteuert wird. Nach einer kleinen Übung wird die Handhabung mit Potentiometern sehr einfach und interessant, wie im Video zu sehen ist.
In Zukunft werde ich versuchen, den Code um die Möglichkeit zu erweitern, bestimmte Bewegungen von Servomotoren zu erfassen und automatisch auszuführen, was einen kompletten Industrieroboter ergeben würde.
Die Schaltpläne sind im Bild unten zu sehen.
Code
- Code
codeArduino
#includeServo myservo; // Servo-Objekt erstellen, um ein servoServo zu steuern myservo1;Servo myservo2;Servo myservo3;int potpin =0; // analoger Pin zum Anschließen des Potentiometersint potpin1 =1;int potpin2 =2;int potpin3 =3;int val; // Variable zum Lesen des Werts vom analogen Pinint val1;int val2;int val3;void setup () { myservo.attach (8); // verbindet das Servo an Pin 8 mit dem Servo-Objekt myservo.attach (9); myservo.attach(10); myservo.attach (11);}void loop () { val =analogRead (potpin); // liest den Wert des Potentiometers (Wert zwischen 0 und 1023) val =map(val, 0, 1023, 0, 180); // skaliere es, um es mit dem Servo zu verwenden (Wert zwischen 0 und 180) myservo.write (val); // setzt die Servoposition entsprechend der skalierten Wertverzögerung (15); // wartet, bis das Servo dort ankommt val1 =analogRead (potpin1); val1 =map(val1, 0, 1023, 0, 180); myservo1.write(val1); Verzögerung (15); val2 =analogRead (potpin2); val2 =map(val2, 0, 1023, 0, 180); myservo2.write(val2); Verzögerung (15); val3 =analogRead (potpin3); val2 =map(val3, 0, 1023, 0, 180); myservo3.write(val3); Verzögerung (15); }
Kundenspezifische Teile und Gehäuse
eezybotarm_uVD6bjbxQi.zipSchaltpläne
Herstellungsprozess