


Menschlicher Follower-Bot
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hey Guyzz...
Ich vertraue darauf, dass in dieser Pandemie jeder zu Hause ist und sicher bleibt.
Ich habe ein neues Projekt namens Human Following Bot gemacht.
Sehen Sie sich das ganze Video an, um dieses Projekt zu Hause zu machen.
Es verwendet 2 IR-Sensoren und einen Ultraschallsensor. IR-Sensoren, die verwendet werden, um dem Menschen oder Objekt zu folgen, und Ultraschallsensoren werden verwendet, um den Roboter zurück zu bewegen.
Wenn dir dieses Projekt gefällt, respektiere es.
Gib mir Vorschläge, damit ich ihn verbessern kann, oder Feedback, das du meinem YouTube-Kanal geben möchtest.
Link ist:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Sie können mir auch Vorschläge zu "Was habe ich als nächstes Projekt gemacht?" geben
Schritt für dieses Projekt:
1. Sammeln Sie Komponenten wie Arduino, DC-Getriebemotoren mit Rädern, 2 IR-Sensoren, Ultraschallsensor, Servomotor, Karton, l293d-Motortreiberschild, Batterie 9 V, Schalter, Überbrückungsdrähte usw.
2. Nimm Pappe und platziere alle 4 Motoren mit Rädern darauf, um ein Auto zu bauen.
3. Platzieren Sie IR-Sensoren am Auto.
4. Servomotor auf das Auto kleben.
5. Platzieren Sie den Ultraschallsensor in der Box und fügen Sie einen Griff hinzu, bevor Sie ihn an den Servomotor anschließen.
6. Verbinden Sie Arduino und l293d Motorschild am Auto.
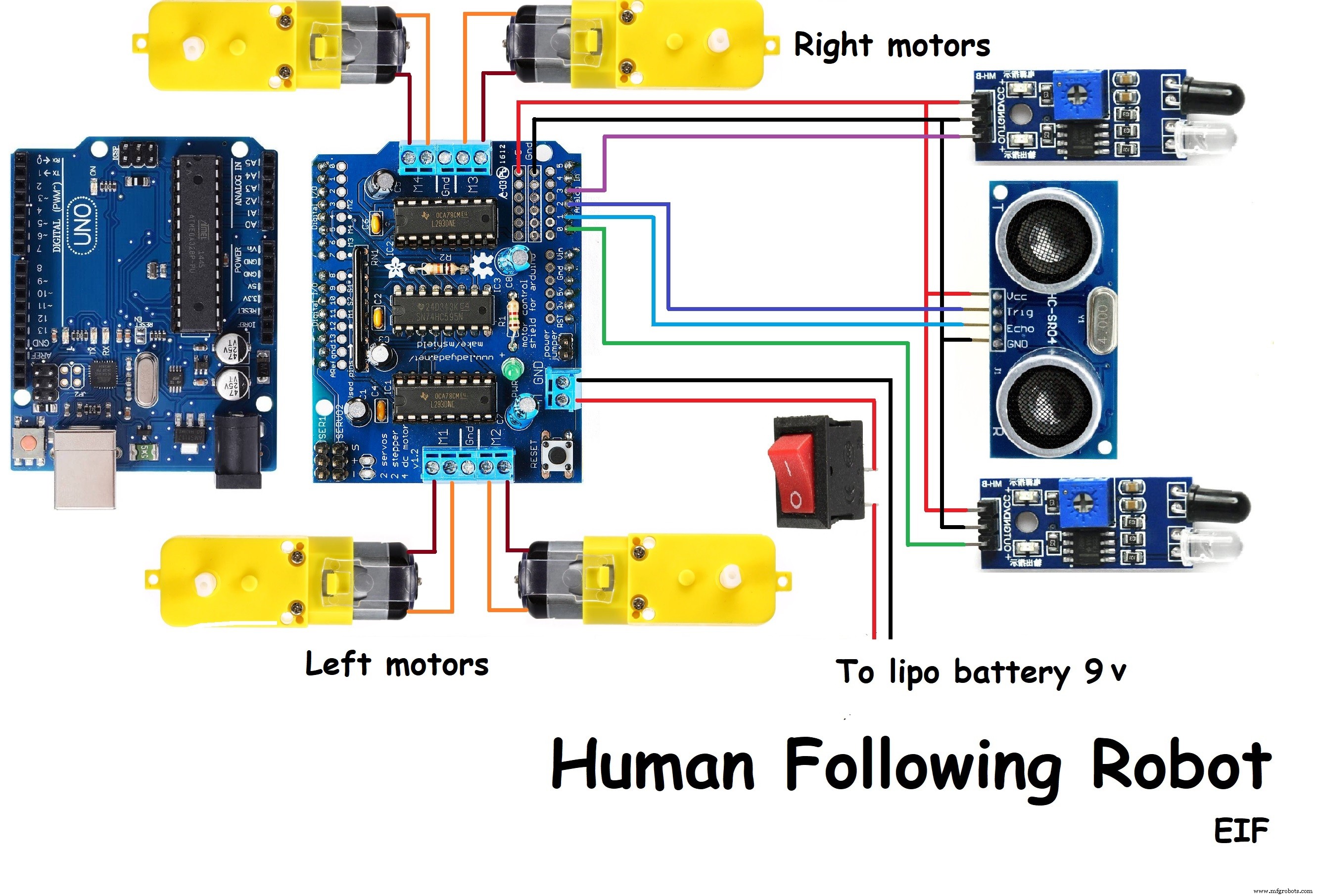
7. Nehmen Sie die Anschlüsse wie im Schaltplan gezeigt vor.
8. Laden Sie den Code hoch und verbinden Sie den Schalter mit der Batterie mit dem l293d-Motortreiberschild.
Passen Sie die Empfindlichkeit der IR-Sensoren an.
Dein Projekt ist fertig...!!!
Besuchen Sie einmal meinen YouTube-Kanal und sehen Sie weitere interessante Projekte.
"Elektronik macht Spaß"
Wenn dir mein Kanal gefällt, abonniere ihn bitte.
Link:https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g
Code
- Code
CodeArduino
// www.YouTube.com/Electronics is Fun //#include#include #define LEFT A0#define echopin A1 // echo pin#define trigpin A2 // Trigger pin #define RECHTS A3AF_DCMotor Motor1(1,MOTOR12_1KHZ);AF_DCMotor Motor2(2,MOTOR12_1KHZ);AF_DCMotor Motor3(3,MOTOR34_1KHZ);AF_DCMotor Motor4(4,MOTOR34_1KHZ);Servo myservo; int pos =0;lange Zeit;void setup(){Serial.begin(9600);myservo.attach(10);for(pos =90; pos <=180; pos +=1){myservo.write(pos);delay(15);} for(pos =180; pos>=0; pos-=1) {myservo.write(pos);delay(15);}for(pos =0; pos<=90; pos + =1) {myservo.write(pos);delay(15);}pinMode(RIGHT, INPUT);pinMode(LEFT, INPUT);pinMode(trigpin, OUTPUT);pinMode(echopin, INPUT);}void loop() {unsigned int distance =read_cm();int Right_Value =digitalRead(RIGHT);int Left_Value =digitalRead(LEFT);Serial.print("R=");Serial.print(Right_Value);Serial.print(" L=" );Serial.print(Left_Value);Serial.print(" D=");Serial.println(Abstand); if((Right_Value==1) &&(Abstand>=10 &&Abstand<=30)&&(Left_Value==1)){forword();}else if((Right_Value==0) &&(Left_Value==1) ){turnRight();}else if((Right_Value==1) &&(Left_Value==0)){turnLeft();}else if((Right_Value==1) &&(Left_Value==1)){stop( );}else if(Abstand> 5 &&Abstand <10){stop();}else if(Abstand <5){backword();}delay(50);}long read_cm(){ digitalWrite(trigpin, LOW); VerzögerungMikrosekunden(2); digitalWrite (Triggerstift, HOCH); VerzögerungMikrosekunden(10); Zeit =pulseIn (Echopin, HIGH); Rückkehrzeit / 29 / 2;}Void forword(){// schalte es in Vorwärtsrichtung einMotor1.setSpeed(120);Motor1.run(FORWARD);Motor2.setSpeed(120);Motor2.run(FORWARD);Motor3.setSpeed (120);Motor3.run(FORWARD);Motor4.setSpeed(120);Motor4.run(FORWARD);}Void backword(){// andersherumMotor1.setSpeed(120);Motor1.run(BACKWARD); Motor2.setSpeed(120);Motor2.run(BACKWARD);Motor3.setSpeed(120);Motor3.run(BACKWARD); Motor4.setSpeed(120);Motor4.run(BACKWARD); }void turnRight(){// das andere rightMotor1.setSpeed(200);Motor1.run(FORWARD);Motor2.setSpeed(200);Motor2.run(FORWARD);Motor3.setSpeed(100);Motor3.run(BACKWARD );Motor4.setSpeed(100);Motor4.run(BACKWARD);}void turnLeft(){// einschalten nach linksMotor1.setSpeed(100);Motor1.run(BACKWARD);Motor2.setSpeed(100);Motor2 .run(BACKWARD);Motor3.setSpeed(200);Motor3.run(FORWARD);Motor4.setSpeed(200);Motor4.run(FORWARD);}void stop(){//gestopptMotor1.setSpeed(0); Motor1.run(RELEASE);Motor2.setSpeed(0);Motor2.run(RELEASE);Motor3.setSpeed(0);Motor3.run(RELEASE);Motor4.setSpeed(0);Motor4.run(RELEASE); }
Schaltpläne
Herstellungsprozess