


Arduino-Sonar
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 |
Über dieses Projekt
Radarbildschirm-Visualisierung für HC-SR04
Arduino-Code:
Sendet Sensormesswerte für jeden Grad, der von den Servowerten bewegt wird, die an den seriellen Port gesendet werden, um von der Verarbeitung aufgenommen zu werden
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Arduino/Arduino_radar_server_arduino/Arduino_radar_server_arduino.ino
Verarbeitungscode:
Zeigt einen Bereich dessen an, was der HC-SR04 von oben nach unten sieht. Nimmt 2 Messwerte auf und zeigt sie an, eine von links nach rechts und eine von rechts nach links. Zeigt den Durchschnitt der 2 Messwerte an
https://github.com/faweiz/My-Arduino/blob/master/arduino_radar/Arduino_radar_HC_SR04/Processing-code/Arduino_radar_client_processing/Arduino_radar_client_processing.pde
Alle Fragen sind willkommen!
Github:https://github.com/faweiz
Portfolio:https://portfolium.com/faweiz
Linkedin:https://www.linkedin.com/in/faweiz
Code
- Unbenannte Datei
Unbenannte DateiArduino
/*https://www.hackster.io/faweiz/arduino-radarRadar Bildschirmvisualisierung für HC-SR04Sendet Sensormesswerte für jeden Grad, der von den Servowerten bewegt wird, die an die serielle Schnittstelle gesendet werden, um von der Verarbeitung aufgenommen zu werden*/#include#include #define TRIGGER_PIN 2 // Arduino-Pin 2 mit Trigger-Pin am Ultraschallsensor verbunden.#define ECHO_PIN 3 // Arduino-Pin 3 mit Echo-Pin am Ultraschallsensor verbunden.#define MAX_DISTANCE 150 // Maximale Entfernung, die wir anpingen möchten (in Zentimeter). Der maximale Sensorabstand beträgt 400-500cm. #define SERVO_PWM_PIN 9 // Servo auf Arduinos Pin 9 setzen // bedeutet -angle .. angle #define ANGLE_BOUNDS 80 #define ANGLE_STEP 1 int angle =0; // Richtung der Servobewegung // -1 =zurück, 1 =vorwärts int dir =1; Servo myservo;NewPing-Sonar (TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); Void setup () { Serial.begin (9600); // serielle Schnittstelle initialisieren:myservo.attach(SERVO_PWM_PIN); // Servo auf Arduinos Pin 9 setzen} Void Schleife () { Verzögerung (50); // wir müssen auf positive Werte renormalisieren, da der Winkel von -ANGLE_BOUNDS .. ANGLE_BOUNDS // und der Servowert positiv sein muss myservo.write(angle + ANGLE_BOUNDS); // Abstand vom Sensor lesen und an seriell senden getDistanceAndSend2Serial (Winkel); // Winkel berechnen if (angle>=ANGLE_BOUNDS || angle <=-ANGLE_BOUNDS) { dir =-dir; } Winkel +=(dir * ANGLE_STEP); aufrechtzuerhalten. Int getDistanceAndSend2Serial(int angle) {int cm =sonar.ping_cm(); Serial.print (Winkel, DEZ); Serial.print (","); Serial.println (cm, DEZ); }
Code
https://github.com/faweiz/My-Arduino/tree/master/arduino_radarArduino_radar_server_arduino.ino
Arduino_radar_client_processing.pde
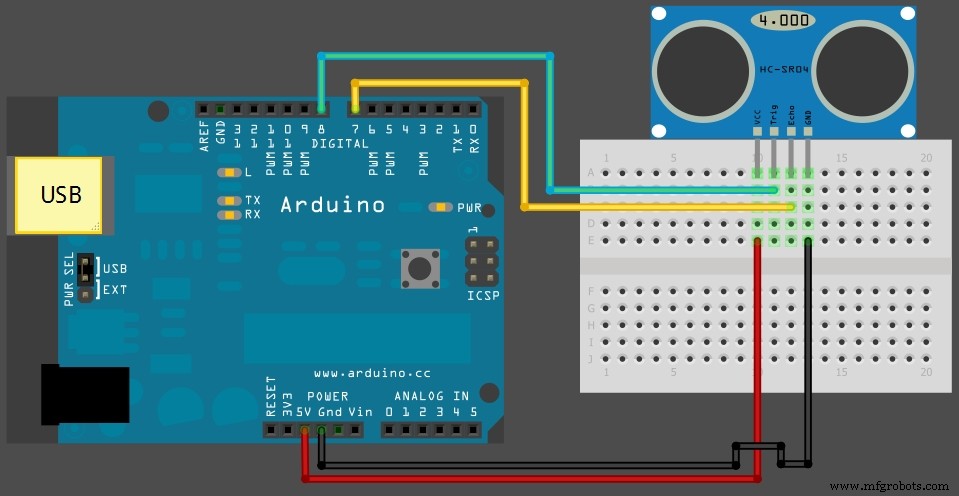
Schaltpläne
Herstellungsprozess