


Das CNC-Bewegungssteuerungssystem vereinfacht
Ich wurde kürzlich gebeten, jemandem aus meiner Familie das Bewegungssteuerungssystem zu erklären, das in CNC-Werkzeugmaschinen verwendet wird. Als ich erkannte, dass diese Person überhaupt keinen Hintergrund in der Fertigung hatte – und sicherlich keine Erfahrung mit so etwas Kompliziertem und Technischem hatte – musste ich meine Erklärung auf etwas Allgemeines und Einfaches beziehen, damit sie sich die Analogie leicht vorstellen konnte … wie Autofahren ein Auto.

Obwohl dieses Thema von Natur aus sehr kompliziert und technisch ist, denke ich, dass diese Analogie das Thema ziemlich gut vereinfacht, aber dennoch interessierten Menschen ein ausreichendes Grundverständnis für das Geschehen vermittelt. Offensichtlich könnte ein so fortgeschrittenes technologisches Fach den größten Teil eines ganzen Semesters am College in Anspruch nehmen, um ein gründliches Verständnis zu erlangen, aber für uns einfache Leute denke ich, dass die Autofahren-Analogie gut funktionieren wird. Aber bevor wir beginnen, müssen wir einige Grundlagen schaffen. Sie müssen die Grundlagen verstehen, wie ein Befehl, der in unserem Gehirn beginnt, durch die CNC-Steuerung wandert und sich schließlich als Bewegung einer der Linearachsen der Maschine manifestiert.
Stellen wir uns unser Teileprogramm (Konversation oder G-Code) als nichts anderes als eine Liste von Befehlen vor. Diese Befehle werden von der CNC-Steuerung organisiert und in verschiedene Kategorien für jede der einzelnen Achsen der Maschine eingeordnet – und dann an die entsprechende Achse weitergegeben. Sobald der Servoantrieb den Befehl für eine bestimmte Achse erhalten hat, wird dieser Befehl in eine einfache Spannungsanforderung zerlegt, die erforderlich ist, um die Achse gemäß dem Befehl zu bewegen – und diese Spannung wird dann an den Motor angelegt … was den Motor veranlasst drehen und damit die Achse in Bewegung versetzen. Während sich die Achse bewegt, wird ihre aktuelle Position kontinuierlich von einem am Ende des Motors angebrachten Encoder oder einem entlang der Achse angebrachten Glasmaßstab überwacht. Dieses Überwachungsgerät liefert eine Rückmeldung an den Servoantrieb, sodass bei Bedarf Änderungen an den Spannungsbefehlen vorgenommen werden können. Mehr Spannung bedeutet, dass sich der Motor schneller dreht und die Achse aufholt, wenn sie zurückbleibt. und weniger Spannung bedeutet, dass sich der Motor langsamer dreht, wodurch die Achse verlangsamt wird, wenn sie beginnt, der befohlenen Bewegung zu weit vorauszulaufen.
Nun, da das aus dem Weg geräumt ist, wenden wir unsere Fahranalogie an. Zuerst brauchen wir einige Befehle, denen wir folgen müssen ... sagen wir, die Route, auf der wir zu unserem endgültigen Ziel fahren werden, ist unser Fräser-Werkzeugweg, und die Geschwindigkeitsbegrenzungsschilder auf dem Weg dienen als unsere befohlene Vorschubgeschwindigkeit. Ihr Gehirn ist die CNC-Steuerung, Ihre Muskeln fungieren als Servoantriebe und Ihre Extremitäten können die Servomotoren sein, die Ihre Achsen steuern. Wir werden unsere Augen und den Tachometer für Feedback verwenden. Nun, da nichts im Leben perfekt oder genau sein kann, müssen wir eine gewisse akzeptable Toleranz gegenüber unseren vorgegebenen Positionen zulassen. Nehmen wir also an, die gesamte Breite der Straße ist unsere Positionierungstoleranz, und solange wir auf dem Asphalt bleiben, wir sind startklar!
Stellen Sie sich in dieser ersten Analogie vor, wie Sie auf einer verlassenen Autobahn mitten im Nirgendwo geparkt sind und die Straße so gerade wie ein Pfeil vor Ihnen liegt. Ihnen wurde befohlen, eine Strecke von einer Meile zu fahren und dabei der doppelten gelben Linie in der Mitte der Straße zu folgen, und die Geschwindigkeitsbegrenzung für diese Straße beträgt 100 Meilen pro Stunde. Zu Beginn weist Ihr Gehirn die Muskeln in Ihrem Fuß an, Druck auf das Gaspedal auszuüben, und das Auto beginnt sich zu bewegen. Um der gelben Linie zu folgen, wird Ihr Gehirn das visuelle Feedback Ihrer Augen verwenden, um die Muskeln in Ihren Armen zu steuern und das Fahrzeug in einer geraden Linie zu halten - und abhängig von dem Feedback, das Sie vom Tachometer erhalten, muss Ihr Gehirn dies auch tun Steuern Sie die Muskeln in Ihren Knöcheln, um den auf das Gaspedal ausgeübten Druck zu erhöhen oder zu verringern, um die befohlene Geschwindigkeit von 100 Meilen pro Stunde beizubehalten. Positionstoleranz ist hier wirklich kein Thema. Okay, mir ist klar, dass das extrem vereinfacht war, aber jetzt, wo Sie sehen, wie meine Fahranalogie angewendet werden kann, können wir noch ein oder zwei Schritte weiter gehen.
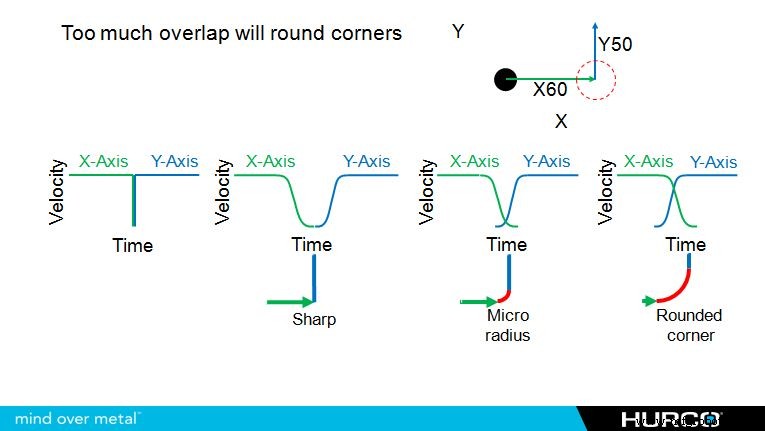
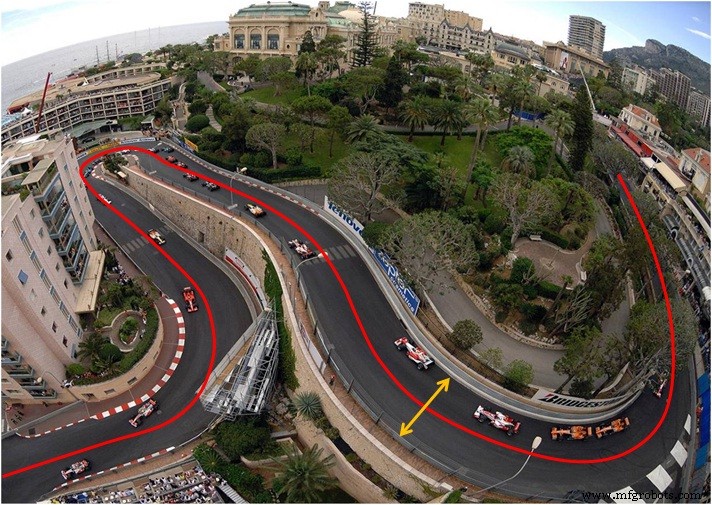
Unter Verwendung der gleichen Befehle wie oben (der doppelten gelben Linie eine Meile folgend, bei einer Geschwindigkeit von 160 km/h und unter Verwendung der gesamten Straßenbreite als akzeptable Toleranz) gehen wir weiter zu Analogie Nummer zwei … wir sitzen mittendrin das letzte Stück einer geraden Straße, auf die wir für die nächste Meile stoßen werden. Die vor uns angelegte Straße ist windig und hügelig, und es wird diesmal etwas schwieriger, innerhalb unserer befohlenen Beschränkungen zu fahren. Wir beschleunigen auf unsere befohlene Geschwindigkeit von 160 km/h, werden aber schnell mit unserem ersten Hindernis konfrontiert … einer vollen 90-Grad-Kurve nach rechts. Da wir erkennen, dass wir diese Kurve nicht erfolgreich navigieren und trotzdem unsere aktuelle Geschwindigkeit beibehalten können, müssen wir unsere Geschwindigkeit reduzieren. Wir müssen eine gleichmäßige Flugbahn durch die Kurve finden, die es uns ermöglicht, eine Geschwindigkeit beizubehalten, die so nahe wie möglich an unserer befohlenen Geschwindigkeit liegt, uns aber nicht dazu bringt, von der Straße abzukommen. Als Reaktion auf das Feedback unserer visuellen Geräte sendet unser Gehirn die Befehle zur Steuerung der erforderlichen Bewegungen und passt unsere Geschwindigkeit und Flugbahn an, um die Kurve erfolgreich zu navigieren.
Dann, fast sofort, stehen wir vor einem noch herausfordernderen Hindernis … einer „S“-Kurve mit einem Anstieg in der ersten Hälfte und einer Abfahrt in der zweiten Hälfte. Obwohl diese Situation ähnlich gehandhabt werden würde wie die obige einfache 90-Grad-Kurve – unsere Geschwindigkeit und unsere Flugbahn für einen möglichst glatten und schnellstmöglichen Weg zu steuern, während sie dennoch sicher auf der Straße bleibt – müssen wir jetzt auch auf die Höhenänderungen reagieren … Erhöhen Sie den Druck auf das Gaspedal, während Sie den ersten Abschnitt der Kurve hinauffahren, aber verringern Sie diesen Druck und betätigen Sie gegebenenfalls die Bremsen im letzten Abschnitt, damit wir unsere befohlene Geschwindigkeit von 100 Meilen pro Stunde nicht überschreiten, wenn die Schwerkraft beginnt zu übernehmen. Diese Aktion und Reaktion wird für jedes Hindernis fortgesetzt, auf das wir stoßen, bis wir unser endgültiges Ziel erreicht haben … das Ende des Programms!
Wenn wir über Bewegungssteuerung sprechen, müssen wir auch über etwas sprechen, das als „Block-Look-Ahead“ bezeichnet wird, was normalerweise an der Anzahl der Blöcke gemessen wird, die die Steuerung im Voraus verarbeiten kann – wodurch sich die Steuerung besser auf bevorstehende Hindernisse vorbereiten kann. In unserer Fahranalogie könnte Block Look-Ahead als LCD-Display dargestellt werden, das im Armaturenbrett montiert ist und uns eine Karte der Strecke liefert, sodass wir möglicherweise die Flugbahn auf unserem aktuellen Hindernis ändern können, so wie wir es tun werden in einer besseren Position, um ein zukünftiges Hindernis reibungslos auszuführen. Je komplizierter der Fräser-Werkzeugweg wird, desto mehr Vorausschau ist natürlich erforderlich, um den glattesten und schnellsten Weg zur Ziellinie aufrechtzuerhalten. Obwohl jeder Werkzeugmaschinenhersteller eine Möglichkeit hat, Block-Look-Ahead auf ähnliche Weise zu handhaben, sind einige davon effektiver als andere.
Die WinMax-Steuerung von Hurco hat etwas namens UltiMotion… ein patentiertes softwarebasiertes Bewegungssteuerungssystem, das einen variablen Block-Look-Ahead bietet; Dadurch kann die Steuerung bei Bedarf bis zu 10.000 Blöcke in die Zukunft sehen und die Zykluszeit um bis zu 30 % reduzieren - insbesondere bei komplizierteren Werkzeugwegen, bei denen mehr Vorausschau erforderlich ist. Offensichtlich erfordert die Steuerung auf den einfacheren Schneidpfaden – wie denen in unseren ersten beiden Analogien oben – weit weniger Vorausschau als das letzte Szenario … daher wird mehr RAM-Speicher der Steuerung freigegeben und kann besser für andere verwendet werden Dinge. Steuerungen, die nicht über diese einzigartige Fähigkeit zur „Anpassung“ an die aktuellen Anforderungen der Steuerung verfügen, sind nicht in der Lage, den verfügbaren Steuerungs-RAM-Speicher wiederzuverwenden, und können von dieser Art von Variabilität nicht profitieren. P>

CNC-Maschine
- Die besten CNC-Marken
- Einführung des SIEMENS 808D-Steuerungssystems für CNC-Router
- Ein Kunde aus Ägypten kam in unsere Fabrik, um die CNC-Maschine zu sehen
- Kunde aus der Mittelmeerregion studierte Cnc-Router in der Fabrik
- Kunden auf dem ganzen Weg von Norwegen zu unserer CNC-Fräserfabrik
- Referenzen für unseren CNC-Fräser
- CNC-Prototyping-Services
- CNC-Bearbeitung in der Automobilindustrie
- Qualitätskontrolle in der CNC-Bearbeitung
- Die Kosten der CNC-Bearbeitung