


Einführung in kapazitive Beschleunigungsmesser:Beschleunigungsmessung mit kapazitiver Sensorik
In diesem Artikel besprechen wir, wie die kapazitive Sensorik zur Messung der Beschleunigung verwendet wird.
Beschleunigungsmesser finden in verschiedenen Anwendungsbereichen Verwendung. Beispielsweise werden in Automobilanwendungen Beschleunigungsmesser verwendet, um das Airbagsystem zu aktivieren. Kameras verwenden Beschleunigungsmesser zur aktiven Stabilisierung von Bildern. Computerfestplatten sind auch auf Beschleunigungssensoren angewiesen, um externe Stöße zu erkennen, die den Lese-/Schreibkopf des Geräts beschädigen können. In diesem Fall unterbricht der Beschleunigungsmesser den Fahrbetrieb, wenn ein externer Stoß auftritt. Dies sind nur einige Anwendungen für Beschleunigungsmesser.
Die Möglichkeiten, wofür diese Geräte verwendet werden können, sind eigentlich endlos. Die enormen Fortschritte in der Mikrofertigungstechnologie haben die heutigen kleinen, kostengünstigen mikrobearbeiteten Beschleunigungsmesser ermöglicht. Tatsächlich sind die geringe Größe und die geringen Kosten zwei der Hauptfaktoren, die es uns ermöglichen, diese Geräte in einem so breiten Anwendungsspektrum einzusetzen.
In diesem Artikel werfen wir einen Blick auf die Physik der Beschleunigungsmessung. Wir werden sehen, wie eine Masse-Feder-Dämpfer-Struktur (auch bekannt als Masse-Dämpfer-Feder) eine Beschleunigung in eine Verschiebungsgröße umwandeln kann und wie der kapazitive Erfassungsansatz angewendet werden kann, um diese Verschiebung in ein elektrisches Signal proportional zu umzuwandeln angewendete Beschleunigung.
Messen der Beschleunigung mit einem Masse-Feder-Dämpfer
Zur Messung der Beschleunigung kann eine Masse-Feder-Dämpfer-Struktur wie in Abbildung 1 verwendet werden.
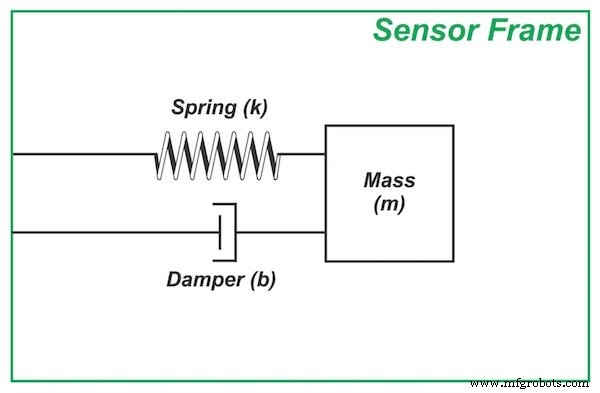
Abbildung 1. Die Masse-Feder-Dämpfer-Struktur
Eine bekannte Masse, allgemein als Prüfmasse (oder Prüfmasse) bezeichnet, ist über eine Feder mit dem Sensorrahmen verbunden.
Obwohl der Dämpfer ein wesentlicher Bestandteil dieses Systems ist, werden wir ihn bis zum nächsten Artikel dieser Serie verschieben, da er für EEs etwas mysteriös sein könnte und einige Absätze erforderlich sein könnten, um die grundlegenden Konzepte eines Dämpfers vorzustellen.
Sehen wir uns an, wie die in Abbildung 1 gezeigte Struktur Beschleunigungen erkennen kann.
Wenn der Sensorrahmen durch eine äußere Kraft beschleunigt wird, neigt die Prüfmasse aufgrund ihrer Trägheit dazu, „zurückzuhalten“. Dadurch ändert sich die relative Position der Prüfmasse in Bezug auf den Sensorrahmen, wie unten dargestellt.
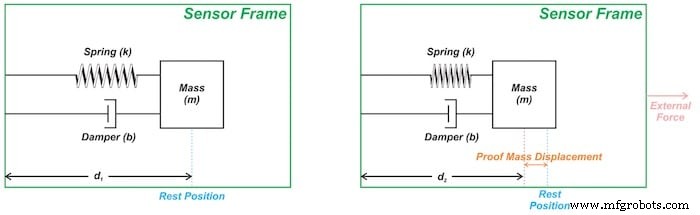
Abbildung 2. (a) Die Prüfmasse befindet sich in Ruhestellung, wenn keine äußere Kraft einwirkt. (b) Wenn der Rahmen nach rechts beschleunigt, beobachtet der Beobachter im Sensorrahmen, dass die Prüfmasse auf die linke Seite ihrer Ruheposition verschoben wird.
Abbildung 2(a) zeigt die Prüfmasse in ihrer Ruheposition, wenn keine äußere Kraft vorhanden ist. Wenn eine äußere Kraft auf den Rahmen ausgeübt wird, wie in Abbildung 2(b) gezeigt, beschleunigt der Rahmen nach rechts. Die Prüfmasse neigt zunächst dazu, in Ruhe zu bleiben, was die relative Position der Prüfmasse in Bezug auf den Rahmen ändert (d2
Ein Beobachter im nicht inertialen (d. h. beschleunigenden) Rahmen des Sensors beobachtet, dass die Prüfmasse auf die linke Seite ihrer Ruheposition verschoben ist. Die Feder wird aufgrund der Auslenkung der Prüfmasse zusammengedrückt und übt eine der Auslenkung proportionale Kraft auf die Prüfmasse aus. Die von der Feder ausgeübte Kraft drückt die Prüfmasse nach rechts und beschleunigt sie in Richtung der äußeren Kraft.
Wenn für die verschiedenen Parameter des Systems geeignete Werte gewählt werden, ist die Prüfmassenverschiebung proportional zum Wert der Rahmenbeschleunigung (nachdem die Übergangsreaktion des Systems abgeklungen ist).
Zusammenfassend wandelt eine Masse-Feder-Dämpfer-Struktur die Beschleunigung des Sensorrahmens in die Prüfmassenverschiebung um. Die verbleibende Frage ist, wie können wir diese Verschiebung messen?
Messen des Nachweises der Massenverschiebung:Kapazitiver Sensoransatz
Die Probemassenverschiebung kann auf verschiedene Weise gemessen werden. Eine gängige Methode ist der in Abbildung 3 dargestellte kapazitive Sensoransatz.
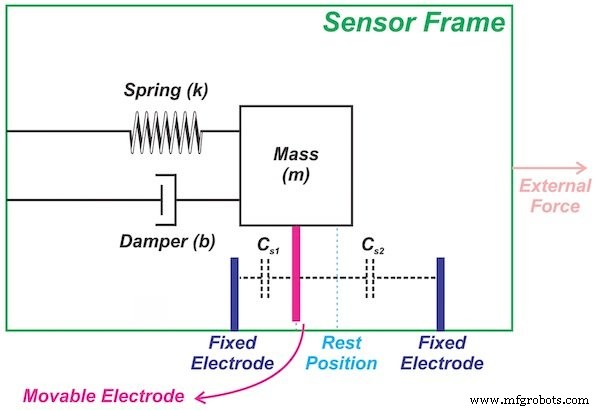
Abbildung 3
Am Sensorrahmen sind zwei Elektroden befestigt, zusammen mit einer beweglichen Elektrode, die mit der Prüfmasse verbunden ist. Dadurch entstehen zwei Kondensatoren, Cs1 und Cs2 , wie in Abbildung 3 gezeigt.
Wenn sich die Prüfmasse in eine Richtung bewegt, nimmt die Kapazität zwischen der beweglichen Elektrode und einer der festen Elektroden zu, während die Kapazität des anderen Kondensators abnimmt. Aus diesem Grund müssen wir nur die Änderungen in den Sense-Kondensatoren messen, um die Probemassenverschiebung zu erkennen, die proportional zur Eingangsbeschleunigung ist.
Beschleunigungsmesser-Signalkonditionierung mit synchroner Demodulation
Um die Änderungen in den Messkondensatoren genau zu messen, können wir die synchrone Demodulationstechnik anwenden. Abbildung 4 zeigt eine vereinfachte Version der Signalkonditionierung, die in den Beschleunigungsmessern der ADXL-Familie von Analog Devices verwendet wird.
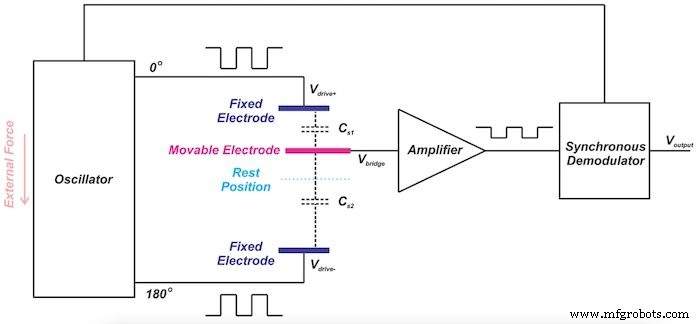
Abbildung 4. Bild (angepasst) mit freundlicher Genehmigung von Analog Devices
In diesem Fall wird eine 1-MHz-Rechteckwelle als Wechselstromerregung der Erfassungskondensatoren Cs1 . verwendet und Cs2 . Die an die festen Elektroden angelegten Rechteckwellen haben die gleiche Amplitude, sind jedoch zueinander um 180° phasenverschoben. Wenn sich die bewegliche Elektrode in ihrer Ruheposition befindet, beträgt die Spannung am Verstärkereingang null Volt.
Wenn sich die bewegliche Elektrode einer der festen Elektroden nähert, erscheint ein größerer Teil der Anregungsspannung dieser Elektrode am Verstärkereingang VBrücke , was bedeutet, dass die am Verstärkereingang erscheinende Rechteckwelle in Phase mit der Erregerspannung der näheren Elektrode ist.
In Abbildung 4 ist der verstärkte Ausgang beispielsweise eine Rechteckwelle in Phase mit Vdrive+ weil Cs1 ist größer als Cs2 .
Die Amplitude von VBrücke eine Funktion der Prüfmassenverschiebung ist; wir müssen jedoch auch die Phasenbeziehung von VBrücke . kennen in Bezug auf VLaufwerk+ und VLaufwerk- um zu bestimmen, in welche Richtung die Prüfmasse verschoben wird.
Der Synchrondemodulator multipliziert grundsätzlich die Verstärkerausgabe mit der Erregerspannung (entweder Vdrive+ oder VLaufwerk- ), um die Rechteckwelle am Verstärkerausgang in eine Gleichspannung umzuwandeln, die sowohl den Betrag der Verschiebung als auch ihre Richtung anzeigt.
Um zu erfahren, wie dies durch synchrone Demodulation erreicht wird, lesen Sie bitte meinen Artikel über LVDT-Demodulationstechniken:LVDT-Demodulation:Gleichrichter-Typ vs. Synchrone Demodulation.
Warum verwenden wir keinen einzelnen Sensorkondensator?
Die in Abbildung 3 dargestellte kapazitive Erfassung hat einen differentiellen Charakter:wenn Cs1 steigt, Cs2 nimmt ab und umgekehrt.
Es ist auch möglich, eine einpolige kapazitive Abtastung zu verwenden, bei der eine der festen Elektroden weggelassen wird, also nur ein variabler Kondensator vorhanden ist. In diesem Fall können wir das System wie in Abbildung 5 gezeigt modellieren.
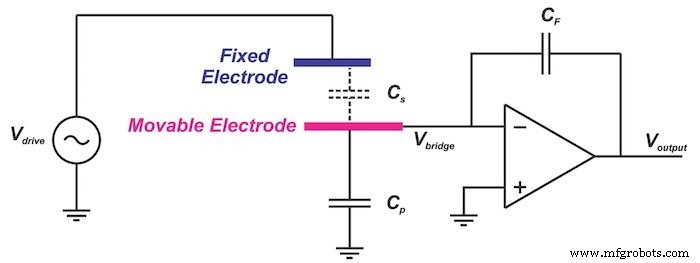
Abbildung 5
Diese Single-Ended-Version scheint eine einfachere Lösung zu sein. Warum verwenden wir also keinen einzelnen Sensorkondensator?
Einzelsensor-Kondensatorstruktur:Nichtlinearer Ausgang
Sehen wir uns diese Schaltung genauer an.
In der obigen Abbildung ist Cp modelliert die gesamte parasitäre Kapazität von der beweglichen Elektrode zur Erde. Idealerweise VBrücke ist am virtuellen Boden und wir können Cp . ignorieren weil es auf der einen Seite Masse und auf der anderen Seite virtuelle Masse hat.
Daher kann die Ausgabe einfach erhalten werden als:
\[ V_{output} =-\frac{C_s}{C_F} V_{drive}\]
Gleichung 1
Beachten Sie, dass der Bias-Strompfad in Abbildung 5 nicht dargestellt ist. Mit der Grundgleichung des Kondensators können wir die Ausgabe in Form der Prüfmassenverschiebung ausdrücken.
Für einen Kondensator C gilt:
\[ C =\epsilon \frac{A}{d}\]
Gleichung 2
wobei ε die dielektrische Permittivität ist, A die Parallelplattenfläche ist und d der Abstand zwischen den beiden leitenden Platten ist. Nehmen wir der Einfachheit halber an, dass die beiden Kondensatoren Cs und CF haben die gleichen ε und A.
Gleichung 1 kann dann vereinfacht werden zu:
\[ V_{output} =-\frac{d_F}{d_s} V_{drive}\]
wobei dF und ds bezeichnen den Abstand zwischen den Elektroden von CF und Cs , bzw. ds kann als Summe einer Anfangsdistanz d0 . ausgedrückt werden und der Verschiebungswert Δd.
Von dort erhalten wir:
\[ V_{output} =-\frac{d_F}{d_0 + \Delta d} V_{drive}\]
Wie Sie sehen, befindet sich der Verschiebungsterm (Δd) im Nenner der Ausgabegleichung. Daher ist die Ausgabe eine nichtlineare Funktion der Probemassenverschiebung Δd.
Differentialstruktur:Lineare Ausgabe
Betrachten wir die Übertragungsfunktion der differenziellen kapazitiven Erfassung, die in Abbildung 4 dargestellt ist.
Sie können überprüfen, dass VBrücke . mit differenzieller kapazitiver Erfassung wird gegeben durch:
\[ V_{Brücke} =\frac{C_{s1} V_{Laufwerk+} + C_{s2} V_{Laufwerk-}}{C_{s1} + C_{s2 }} \]
Anwenden von Gleichung 2 und unter der Annahme, dass die beiden Kondensatoren Cs1 und Cs2 die gleichen ε- und A-Werte haben, erhalten wir:
\[ V_{Brücke} =\frac{d_{s2} V_{Laufwerk+} + s_{s1} V_{Laufwerk-}}{d_{s1} + d_{s2 }} \]
Gleichung 3
wobei ds1 und ds2 bezeichnen den Abstand zwischen den Elektroden von Cs1 und Cs2 , bzw. Wenn ds1 steigt, ds2 verringert sich um den gleichen Betrag und umgekehrt.
Vorausgesetzt:
\[ d_{s1} =d_0 - \Delta d\]
\[ d_{s2} =d_0 + \Delta d\]
\[ V_{Laufwerk+} =- V_{Laufwerk-} \]
Gleichung 3 vereinfacht sich zu:
\[ V_{Brücke} =\frac{\Delta d}{d_0} V_{Laufwerk+} \]
Wie Sie sehen, ist die Ausgangsspannung bei einer Differentialstruktur eine lineare Funktion der Prüfmassenverschiebung Δd. Beachten Sie, dass, obwohl wir Software verwenden könnten, um die Linearitätsfehler des Sensors zu beseitigen, eine lineare Reaktion wünschenswert ist, da dies die Messgenauigkeit erhöht und die Systemkalibrierung erleichtert.
Schlussfolgerung
Wir haben gesehen, wie eine Masse-Feder-Dämpfer-Struktur eine Beschleunigung in eine Verschiebungsgröße umwandeln kann und wie der kapazitive Sensoransatz angewendet werden kann, um diese Verschiebung in ein elektrisches Signal proportional zur angelegten Beschleunigung umzuwandeln.
Wir haben auch kurz erwähnt, dass verschiedene Parameter des Masse-Feder-Dämpfer-Systems geeignet gewählt werden sollten, damit die Probemassenverschiebung proportional zur aufgebrachten Beschleunigung ist.
Im nächsten Artikel leiten wir die Übertragungsfunktion des Masse-Feder-Dämpfer-Systems her, um einen tieferen Einblick in die Systemfunktion zu erhalten.
Eine vollständige Liste meiner Artikel finden Sie auf dieser Seite.
Sensor
- Eine Einführung in den 3D-Druck mit Kunststoffen
- Truphone ermöglicht Massen-IoT-Bereitstellungen mit iSim-Kollaboration
- Würth:3-Achsen-Beschleunigungssensor mit voreingestellten Funktionalitäten
- Temperaturmessung mit RASPBERRY PI
- Können Sie eine Masse von Kundenbeschwerden nicht bewältigen? KI zur Rettung
- Universelle taktile Sensorik mit elektromechanisch gekoppelten Leitern
- Laserlichtbasierter Beschleunigungsmesser
- Geschwindigkeit oder Beschleunigung? Was ist wichtiger beim Wasserstrahlschneiden?
- Eine Einführung in das Punktschweißgerät mit kapazitiver Entladung
- CNC-Werkzeugvoreinstellgerät und CNC-Werkzeugmessung – eine Einführung