


Digitale (EIN/AUS) Hall-Effekt-Geräte:Schalter und Verriegelungen
In diesem technischen Artikel erfahren Sie mehr über die Polarität des B-Felds, unipolare Schalter, omnipolare Schalter, Hall-Effekt-Latches und bipolare Schalter.
Hall-Effekt-Schalter und -Latches sind Magnetfeldkomparatoren. Sie vergleichen die magnetische Flussdichte, manchmal auch als B-Feld bezeichnet, mit einigen vordefinierten Schwellenwerten und geben das Vergleichsergebnis als 1-Bit-Digitalwert aus. Es gibt vier verschiedene Kategorien von digitalen (Ein/Aus) Hall-Sensoren:unipolare Schalter, bipolare Schalter, omnipolare Schalter und Verriegelungen.
Wir werden die Übertragungsfunktion jedes Typs im Detail untersuchen. Zuvor möchte ich jedoch einen wichtigen Begriff klären, der in unserer Diskussion häufig verwendet wird:die Polarität der magnetischen Flussdichte.
Wie definieren wir die Polarität des B-Feldes?
Ein Hall-Effekt-Gerät ist gerichtet. Er erfasst nur die Komponente der magnetischen Flussdichte, die sich entlang seiner Empfindlichkeitsachse befindet. Abbildung 1 zeigt die Empfindlichkeitsachse von zwei gängigen Hall-Bauelementen.
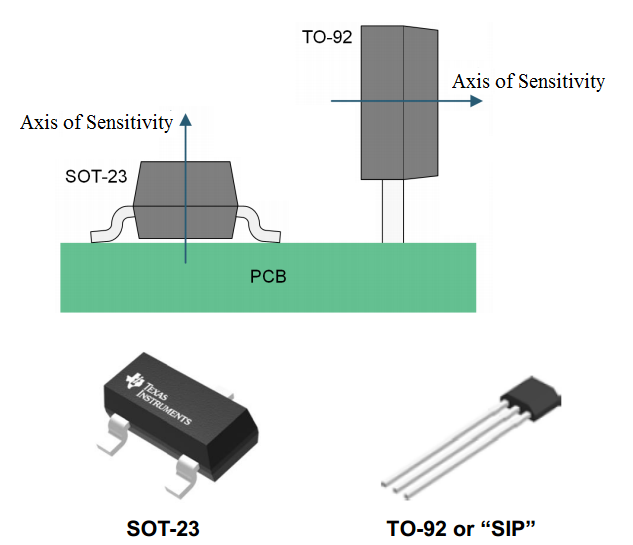
Abbildung 1. Bild mit freundlicher Genehmigung von Texas Instruments.
Wenn das an das Gerät angelegte Magnetfeld eine Komponente in Richtung der Empfindlichkeitsachse erzeugt, wird das B-Feld als positiv angenommen. Wenn das Feld eine Komponente in entgegengesetzter Richtung der Empfindlichkeitsachse erzeugt, wird diese als negativ angenommen. Abbildung 2 zeigt ein Beispiel, bei dem die magnetische Flussdichte an der Sensorposition (A) eine negative Polarität hat.
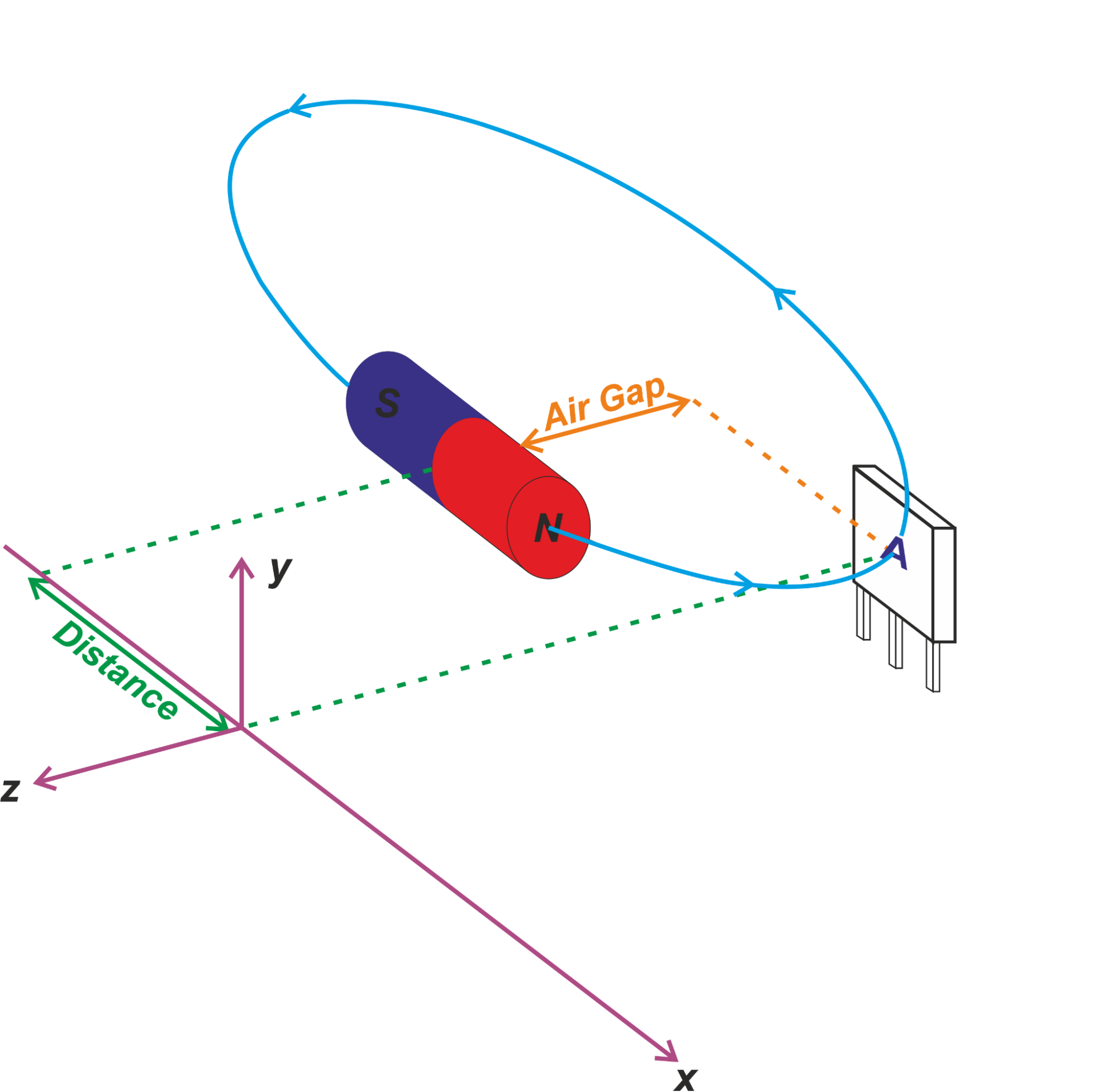
Abbildung 2
Im obigen Beispiel gehen wir davon aus, dass die Geräteempfindlichkeitsachse in Richtung der z-Achse liegt. Da die magnetischen Feldlinien eines Magneten vom Nordpol zum Südpol verlaufen, ist das vom Gerät erfasste B-Feld negativ.
Es gibt auch eine Konvention bezüglich der B-Feld-Polarität, die üblicherweise von Hall-Sensor-Herstellern verwendet wird. Sie betrachten das von einem Magneten erzeugte Magnetfeld als positiv und das des Nordpols als negativ. Dies basiert auf der Annahme, dass die Markenfläche des Sensors zum Magneten zeigt. Die Markenfläche ist die Vorderseite des Sensors, auf der Sie die Geräteteilenummer usw. finden. Unter Berücksichtigung der in Abbildung 1 gezeigten Empfindlichkeitsachsen können Sie überprüfen, dass die Präsentation des Südpols des Magneten zur Markenfläche des Sensors erzeugt ein Magnetfeld in Richtung der Empfindlichkeitsachse (positives Feld). Ebenso erzeugt ein Nordpol ein negatives Magnetfeld. Wenn wir die Magnetpole auf der Rückseite des Sensorpakets präsentieren (nicht auf der gebrandeten Seite des Pakets), ist die obige Konvention nicht mehr gültig!
Eine letzte Anmerkung zum Abschluss dieser Diskussion:Viele Hall-Bauelemente sind eindimensional und erfassen das B-Feld nur entlang einer Empfindlichkeitsachse (wie die in Abbildung 1 gezeigten). Es gibt jedoch komplexere Sensor-ICs, die mehr als ein Hall-Element verwenden, um drei Empfindlichkeitsachsen zu unterstützen (ein dreidimensionaler Sensor). Lassen Sie uns nun die Übertragungsfunktion der verschiedenen Arten von digitalen (ein/aus) Hall-Geräten untersuchen.
Unipolare Schalter
Die Funktionsweise eines unipolaren Schalters ist in Abbildung 3 dargestellt.
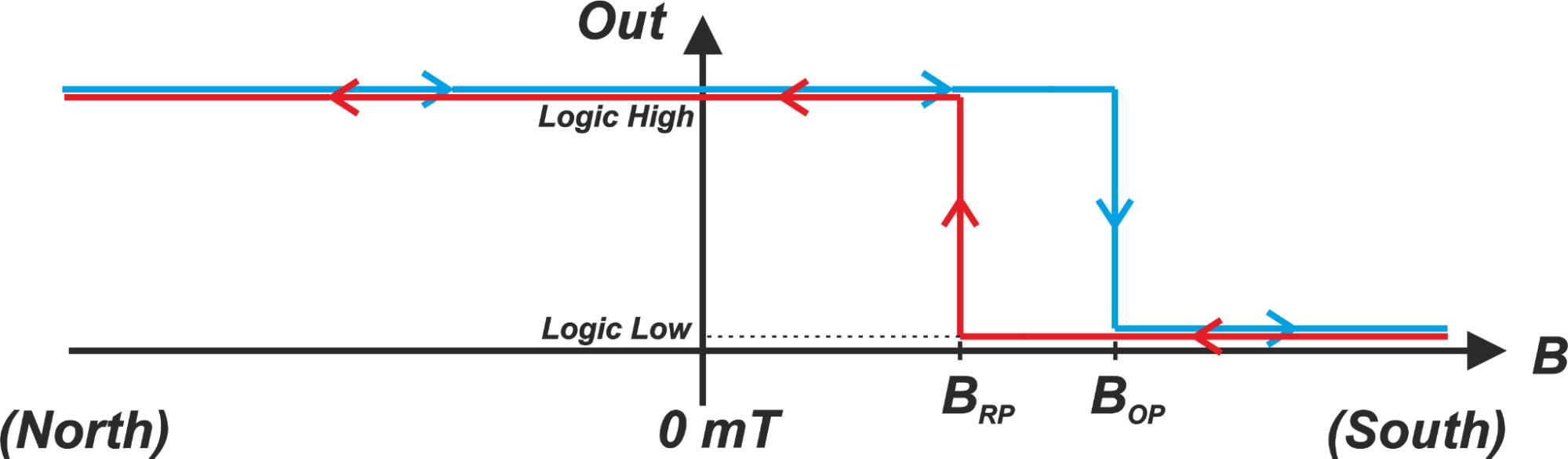
Abbildung 3
Dieses Gerät wird als unipolarer Schalter bezeichnet, da seine Schaltschwellen (BRP und BOP ) liegen im positiven Bereich der B-Feld-Achse. Der Ausgangszustand kann sich nur als Reaktion auf ein Südpolaritätsfeld ändern. Eine Nordpolarität oder ein negatives Feld hat keine Auswirkung auf den Sensor; Erklärung des Namens „unipolarer Schalter“.
Sehen wir uns an, wie das Gerät auf Änderungen des Magnetfelds reagiert. Nehmen Sie an, dass ein Feld mit Nordpolarität an den Sensor angelegt wird, und wir erhöhen das angelegte Feld allmählich (machen Sie es positiver). Für B
Wie reagiert das aktivierte Gerät auf ein abnehmendes Feld? Bei einem abnehmenden Magnetfeld bleibt das Gerät eingeschaltet (logisch niedrig), bis das angelegte Magnetfeld kleiner als BRP . wird . Dies wird durch die rote Kurve in der obigen Abbildung dargestellt. Für B
Daher unterscheidet sich die Schaltschwelle für ein zunehmendes Magnetfeld von der Schaltschwelle für ein abnehmendes Feld. Diese Hysterese ist bewusst auf ein sauberes Schalten am Ausgang ausgelegt. Mechanische Schwingungen in einem Hall-Effekt-Erfassungssystem sowie elektrisches und elektromagnetisches Rauschen können Rauschen in das erfasste Magnetfeld einbringen. Das B-Feld-Rauschen um die Schwellenwerte herum kann zu unbestimmten, sich schnell ändernden Schwankungen am Ausgang des Hall-Sensors führen (Abbildung 4). Diese unerwünschten Schwankungen werden beseitigt, indem die Schwellenwerte der zunehmenden und abnehmenden Felder leicht unterschiedlich eingestellt werden.
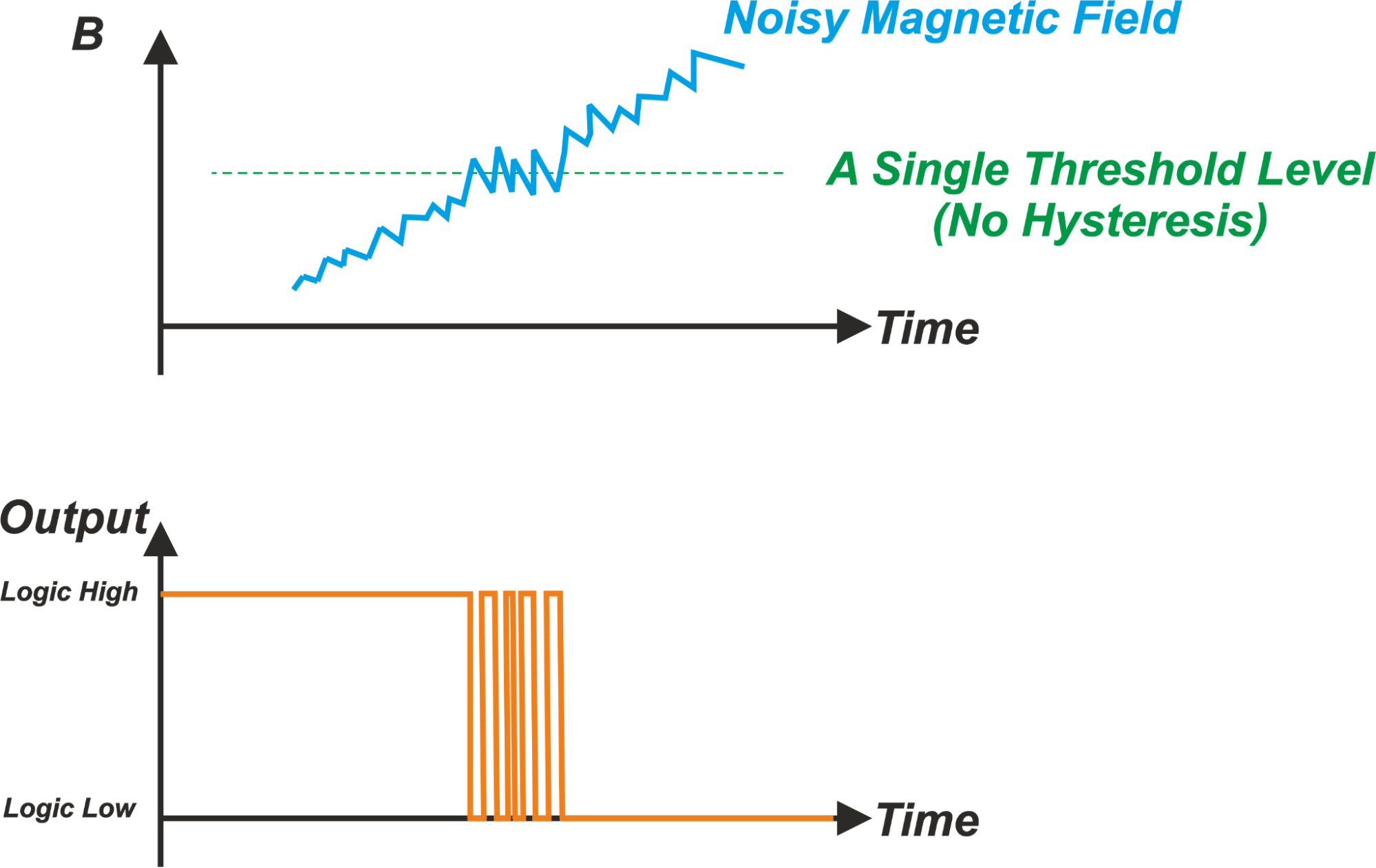
Abbildung 4. Ohne Hysterese kann der Ausgang um den Schwellenwert herum unbestimmt sein.
Wie wir oben gesehen haben, kann die Funktion eines unipolaren Schalters durch zwei verschiedene Parameter beschrieben werden:BOP und BRP . BOP steht für den „magnetischen Arbeitspunkt“ oder einfach den „Arbeitspunkt“. Dies gibt den Schwellenwert für ein zunehmendes Magnetfeld an, oberhalb dessen sich der Sensor einschaltet. BRP ist der „magnetische Auslösepunkt“ oder einfach der „Auslösepunkt“. Es gibt den Schwellenwert für ein abnehmendes Magnetfeld an. Für B
BHYS =BOP − BRP
Wir werden weiter unten erörtern, dass eine ähnliche Notation verwendet werden kann, um den Betrieb der anderen Arten von digitalen Hall-Geräten zu beschreiben.
Beachten Sie, dass die Ein- und Aus-Zustände des Sensorausgangs je nach elektronischem Design des Sensors das Gegenteil von dem in Abbildung 3 dargestellten sein können (logisch niedrig, wenn das Gerät ausgeschaltet ist, und logisch hoch, wenn es eingeschaltet ist).
Omnipolare Schalter
Die Übertragungsfunktion eines omnipolaren Schalters ist in Abbildung 5 dargestellt.
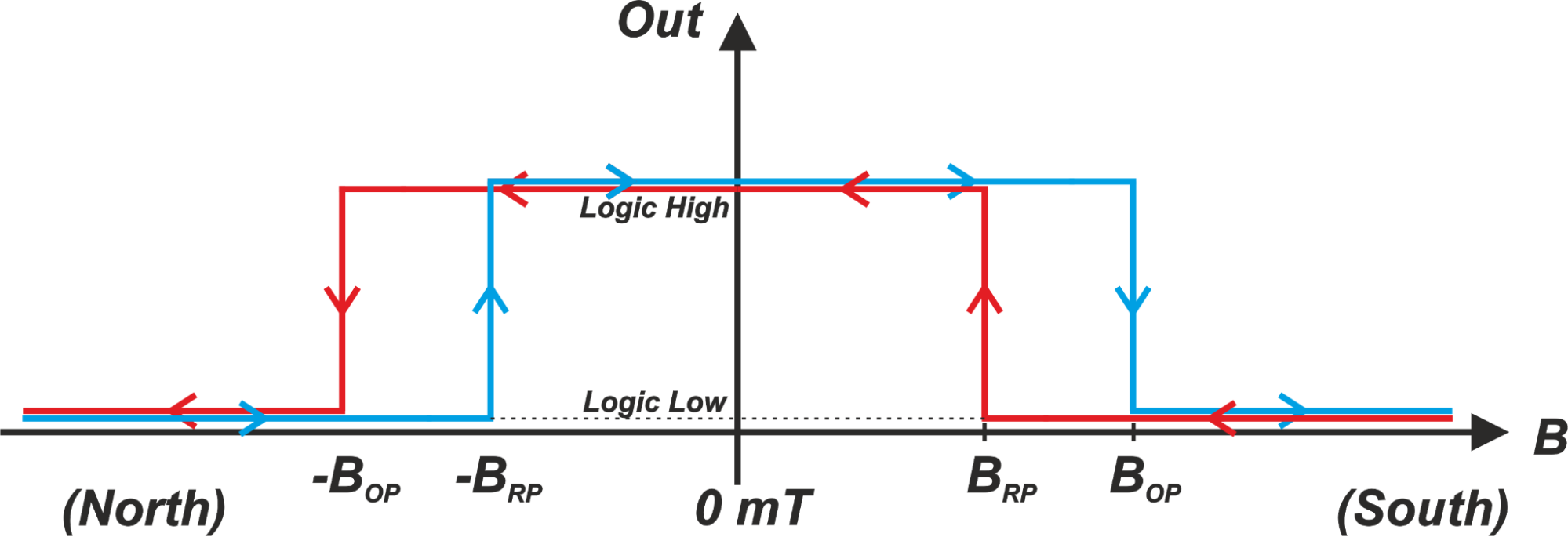
Abbildung 5
Ein omnipolarer Schalter schaltet sich entweder mit einem starken positiven Feld oder einem starken negativen Feld ein. Wie in der Abbildung gezeigt, wenn die Stärke des Magnetfelds größer als BOP . wird (|B|> BOP ), schaltet das Gerät ein und der Ausgang geht auf logisch Low. Wenn die Größe des B-Felds kleiner als BRP . wird (|B|
Hall-Effekt-Verschlüsse
Die Übertragungsfunktion eines Hall-Effekt-Latches ist in Abbildung 6 dargestellt.
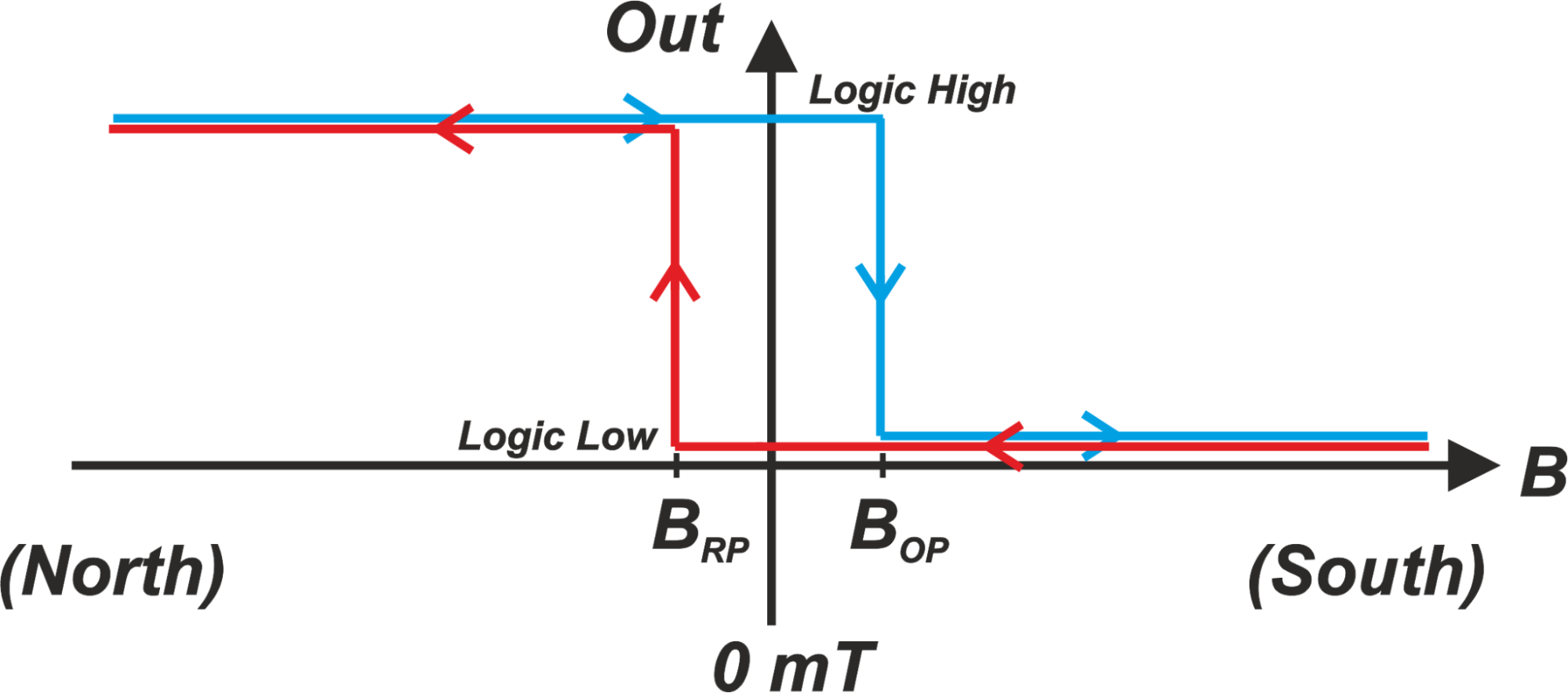
Abbildung 6
Ein Latch-Gerät hat ein positives BOP und ein negatives BRP . Es schaltet sich durch ein ausreichend großes positives Feld ein (B> BOP ) und schaltet bei Vorhandensein eines ausreichend starken Nordpolaritätsfeldes (B
Während ein unipolarer oder omnipolarer Schalter seinen Zustand ändern kann, wenn sich die Amplitude des angelegten Felds ändert, kann ein Latch die Polarität des B-Felds erfassen (vorausgesetzt, das angelegte Feld hat eine ausreichende Stärke). Riegel werden üblicherweise mit Ringmagneten in Rotationsanwendungen verwendet, zum Beispiel zum Erfassen der Position einer rotierenden Welle. Dies ist in Abbildung 7 dargestellt.
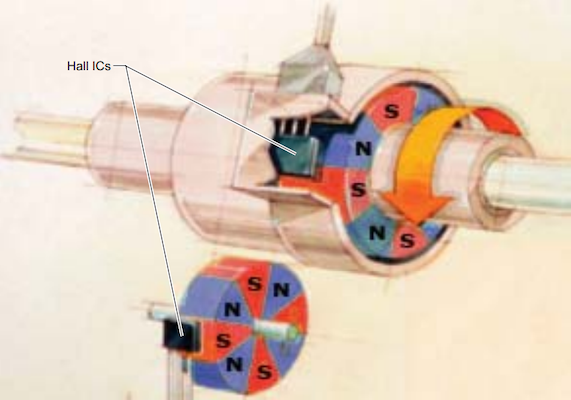
Abbildung 7. Bild mit freundlicher Genehmigung von Allegro.
Wenn sich die Welle dreht, ändert sich die Polarität des erfassten Magnetfelds und der Sensor schaltet sich entsprechend ein/aus. Bei einer Verriegelungsvorrichtung sind die Auslöse- und Auslösepunkte gleich groß, haben jedoch entgegengesetzte Polaritäten (BOP ≠ -BRP ).
Bipolare Schalter
Bei einem bipolaren Schalter kennen wir nur den Wert des „maximalen“ Auslösepunktes und des „minimalen“ Auslösepunktes. Die genauen Schwellenwerte sind jedoch nicht bekannt. Folglich kann sich der genaue Betrieb des Geräts von Einheit zu Einheit ändern. Abbildung 8 zeigt ein Beispiel mit maximalem BOP beträgt etwa 300 Gauss und minimales BRP beträgt etwa -300 Gauss.
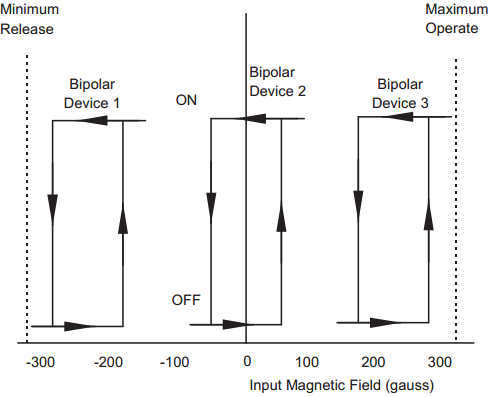
Abbildung 8. Bild mit freundlicher Genehmigung von Honeywell.
Für „Gerät 1“ beide BOP und BRP sind negativ. Für „Gerät 3“ sind beide Schwellenwerte positiv. Ein anderes Beispiel, „Device 2“, hat eine ähnliche Reaktion wie ein Latch. Es hat einen positiven BOP und negatives BRP . Obwohl die Übertragungsfunktion von „Device 2“ der eines Latches ähnelt, sollte beachtet werden, dass die Ansprech- und Freigabepunkte eines bipolaren Schalters möglicherweise nicht gleich groß sind (BOP - BRP ).
Wie Sie sehen, sind auch für Geräte des gleichen Typs, die zusammen in einer Charge gefertigt werden, drei verschiedene Übertragungsfunktionen möglich. Laut Application Note „Bipolar Switch Hall-Effect IC Basics“ von Allegro haben nur etwa 10 % der bipolaren Schalter eine ähnliche Übertragungsfunktion wie „Device 1“ und „Device 3“. Der Rest hat eine Latch-Typ-Antwort. Im Vergleich zu einem Latch-Gerät kann ein bipolarer Schalter eine schmalere Hysteresezone (BHYS =BOP − BRP ) und folglich eine höhere Empfindlichkeit. Da sich der Betriebsmodus eines bipolaren Schalters jedoch von Einheit zu Einheit ändern kann, müssen wir sicherstellen, dass das System für alle möglichen Werte von BOP . richtig funktioniert und BRP (innerhalb der angegebenen Bereichsgrenzen).
Um eine vollständige Liste meiner Artikel zu sehen, besuchen Sie bitte diese Seite.
Sensor
- Elektrische Felder und Kapazität
- Elektromagnetismus
- Magnetische Maßeinheiten
- Magnetfelder und Induktivität
- Grundlagen digitaler Magnetsensoren
- Geräte steigern die PoE-Leistung über vorhandene Switches und Kabel
- Standard-Digitalkamera und KI zur Überwachung der Bodenfeuchtigkeit
- Messung von Magnetfeldern
- Was ist magnetische Abschirmung?
- Hall-Effekt-Sensor verstehen