


Hall-Effekt-Positionserkennung:Antwortlinearität und Steigung für Slide-By-Konfigurationen
Erfahren Sie, wie sich verschiedene Entscheidungen in Bezug auf Hall-Effekt-Sensorlösungen – insbesondere für Slide-by-Konfigurationen – auf Ihre Designs auswirken können.
Hall-Effekt-Sensoren ermöglichen effiziente Lösungen zur Positionserfassung. Bei Hall-Sensoren gibt es keine mechanische Verbindung zwischen Sensor und beweglichem Teil, wodurch eine höhere Zuverlässigkeit und Langlebigkeit erreicht werden kann.
Es gibt mehrere verschiedene Magnetsensorkonfigurationen, die in Positionserfassungsanwendungen auf Hall-Effekt-Basis verwendet werden können. In diesem Artikel betrachten wir eine magnetische Slide-by-Konfiguration, die eine lineare Gauß-Abstands-Kurve erzeugen kann. Wir werden auch sehen, dass es möglich ist, eine Kombination von Magneten zu verwenden, um die Steigung der Gauß-Abstands-Kurve anzupassen.
Linearität kann ein Entscheidungsfaktor sein
In einem früheren Artikel haben wir die einfachen Frontal- und Slide-by-Konfigurationen untersucht. Diese beiden Anordnungen sind in Abbildung 1 dargestellt.
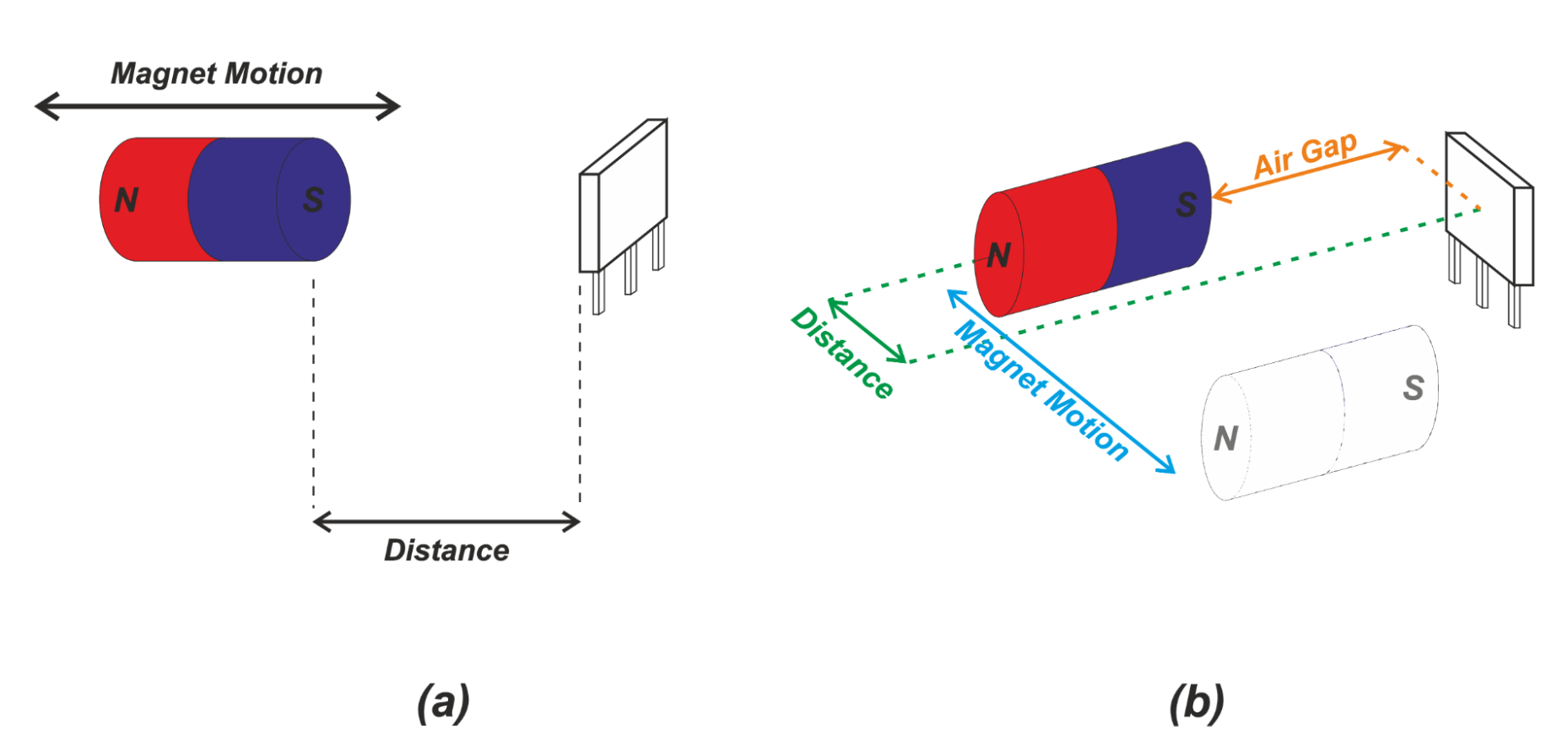
Abbildung 1 (a). Direkt und (b) Slide-by-Sensing.
Wir haben gesehen, dass die Beziehung zwischen dem erfassten Feld und der Entfernung bei den obigen Anordnungen nichtlinear ist. Diese Magnetsensorkonfigurationen werden normalerweise als Näherungsdetektoren in Anwendungen verwendet, bei denen die Genauigkeitsanforderungen nicht sehr hoch sind.
Wenn jedoch eine genaue Positionssteuerung entlang des Abtasthubs erforderlich ist, bevorzugen wir eine lineare Beziehung zwischen der Sensorausgabe und der Verschiebung. Obwohl wir Software verwenden können, um die Linearitätsfehler des Sensors zu beseitigen, ist eine lineare Reaktion wünschenswert, da dies die Messgenauigkeit erhöht und die Systemkalibrierung erleichtert.
Linearer Slide-By-Sensing
Fig. 2(a) zeigt eine Slide-by-Anordnung, die eine lineare Beziehung zwischen der z-Komponente des erfassten Magnetfelds und der Magnetverschiebung zeigt. Abbildung 2(b) zeigt die magnetische Flussdichte (in Richtung der z-Achse) gegenüber dem Magnetweg.
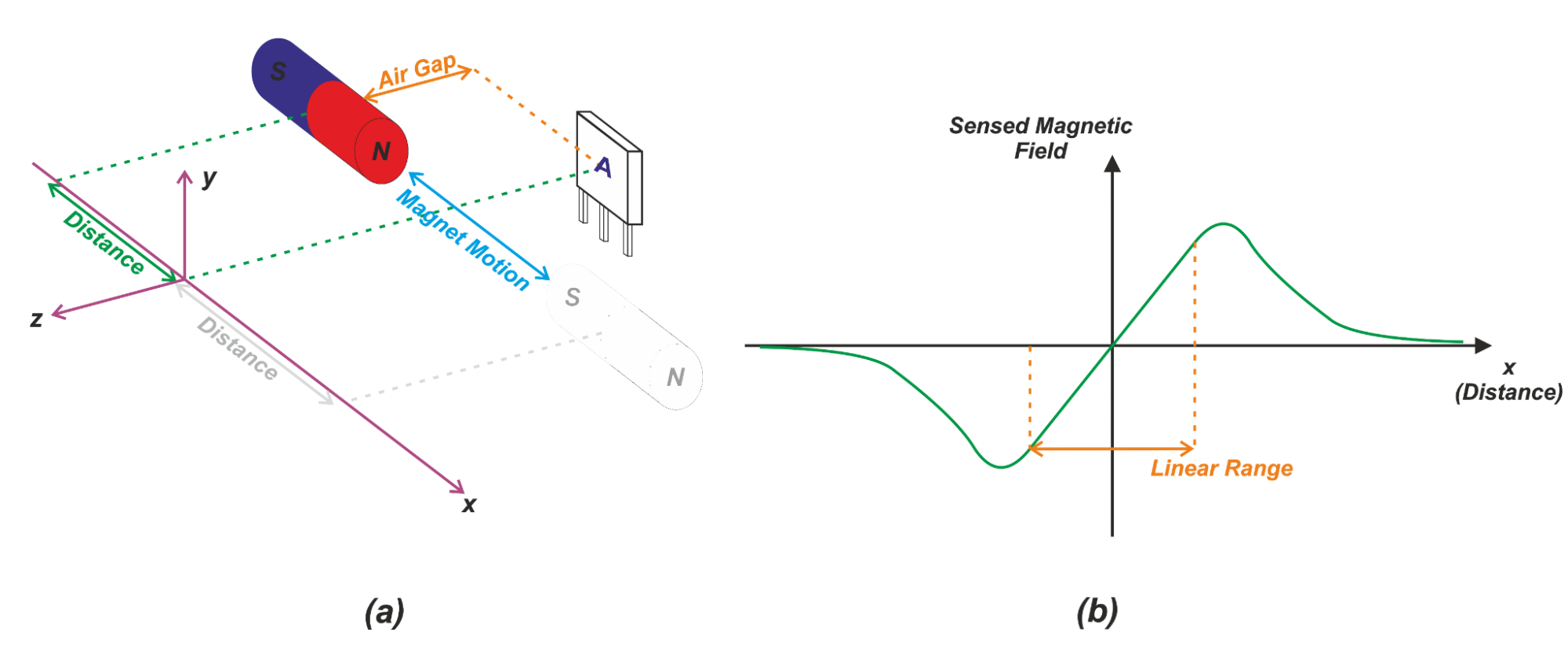
Abbildung 2 (a). Eine Slide-by-Konfiguration mit linearer Reaktion (b) magnetische Flussdichte versus Magnetposition
Wenn sich der Magnet auf der linken Seite des Sensors befindet (x<0), erzeugen die magnetischen Feldlinien des Magneten eine Komponente in entgegengesetzter Richtung der z-Achse. Beachten Sie, dass die Feldlinien vom Nordpol zum Südpol des Magneten verlaufen.
Abbildung 3 zeigt eine der Feldlinien, die durch den Sensor gehen.
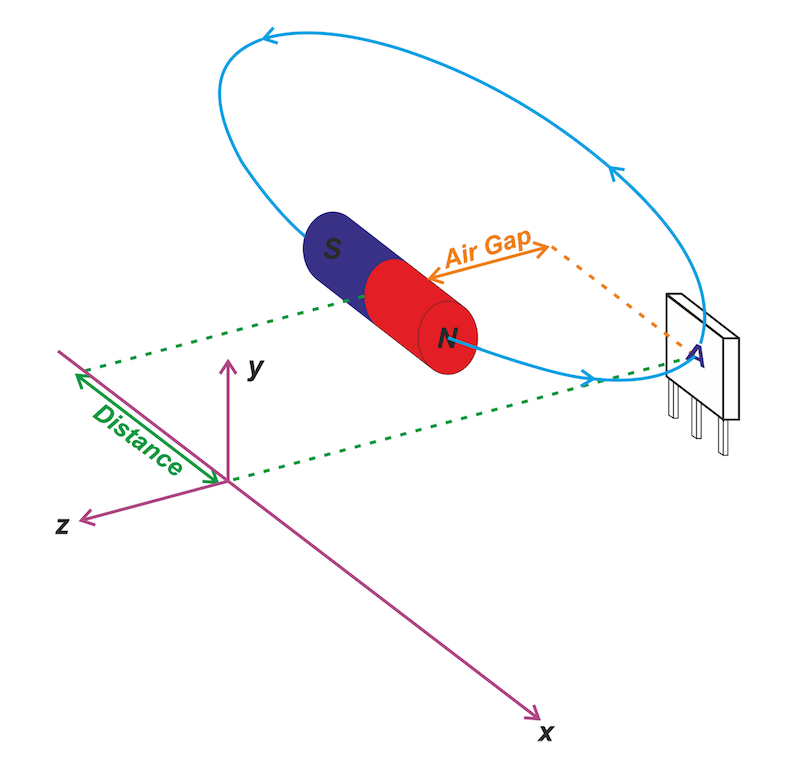
Abbildung 3. Richtung magnetischer Feldlinien durch einen Hall-Effekt-Sensor
Daher ist für x <0 die z-Komponente des erfassten Magnetfelds negativ. Wenn der Magnet die Mittelposition erreicht, ist das Feld in z-Richtung null. Bei einer positiven Verschiebung (x>0) erzeugt das Magnetfeld eine Komponente in Richtung der z-Achse (positives Magnetfeld). Bei großen Verschiebungen in beide Richtungen kann eine kleinere Anzahl der Feldlinien durch den Sensor gehen. Daher nimmt das vom Sensor erfasste Magnetfeld ab.
Eines der Hauptmerkmale dieser Anordnung besteht darin, dass die z-Komponente des Magnetfelds eine lineare Beziehung zur Verschiebung um den Ursprung aufweist. Dieser lineare Bereich ist in Abbildung 2(b) dargestellt. Die Länge des linearen Bereichs ist etwas geringer als die Länge des Magneten. Bei einem 22-mm-Magneten kann sich der lineare Bereich beispielsweise von etwa -10 mm bis +10 mm erstrecken. Dieses lineare Verhalten ermöglicht es uns, die Position eines sich bewegenden Objekts einfacher und genauer zu erkennen.
Was ist, wenn wir einen größeren linearen Bereich benötigen?
Wir können einen längeren Magneten verwenden, um den linearen Bereich der obigen Konfiguration zu erhöhen; bestimmte Anwendungen können jedoch keinen großen Magneten im System aufnehmen. Auch bei langen Magneten können die Kosten ein limitierender Faktor sein. Wenn ein Hub größer als die Magnetlänge erfasst werden soll, können wir den Messbereich durch eine Reihe von Sensoren erweitern. Dies ist in Abbildung 4 dargestellt.
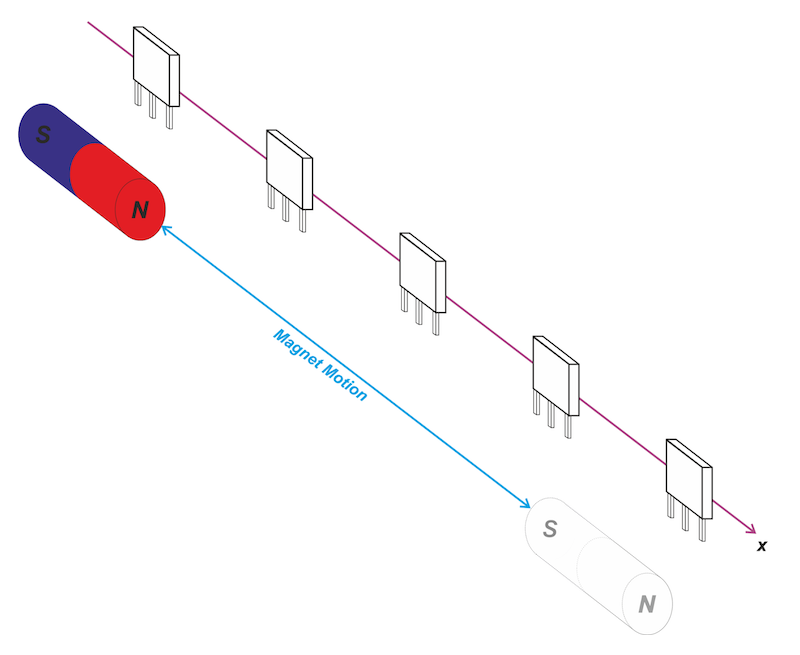
Abbildung 4. Verwendung mehrerer Hall-Effekt-Sensoren für erhöhten linearen Bereich
In diesem Fall müssen wir die Daten von mehr als einem Sensor verarbeiten, um die Objektposition zu finden. Weitere Informationen finden Sie in diesem TI-Anwendungshinweis.
Erkennen der Anwesenheit eines Objekts
Die Slide-by-Konfiguration in Abbildung 2 kann auch zum Erkennen der Anwesenheit eines Objekts verwendet werden (anstatt die Objektposition über seinen Hub zu bestimmen). Angenommen, in dem in Abbildung 2(a) dargestellten Beispiel bewegt sich der Magnet parallel zur x-Achse von links nach rechts. Angenommen, die magnetischen Betriebs- und Auslösepunkte unseres digitalen (EIN/AUS) Hall-Effekt-Sensors sind wie in Abbildung 5 dargestellt.
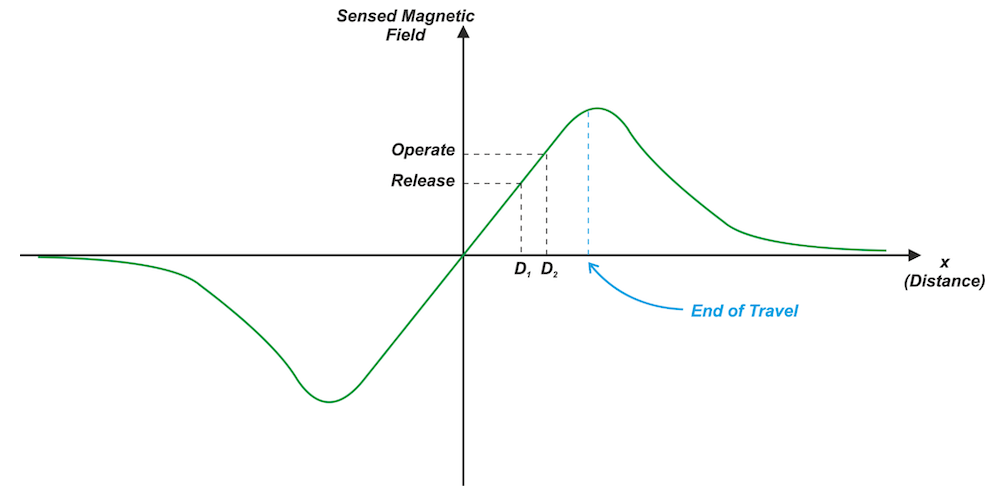
Abbildung 5. Verwenden einer Slide-by-Konfiguration für die EIN/AUS-Erkennung
Nähert sich der Magnet dem Sensor von links nach rechts, wird die magnetische Feldstärke immer größer. Bei D2 ist das erfasste Magnetfeld gleich dem magnetischen Arbeitspunkt, der den Sensor einschaltet. Wenn Sie den Magneten näher an den Sensor bringen, wird das Magnetfeld noch größer und der Sensor bleibt eingeschaltet.
Bewegen wir nun den Sensor in die entgegengesetzte Richtung (von rechts nach links), nimmt das Magnetfeld ab. Bei D1 wird das Magnetfeld kleiner als der Auslösepunkt, wodurch der Sensor ausgeschaltet wird. Dadurch können wir die Anwesenheit des Objekts erkennen. Mit dieser Struktur können wir auch einen Referenzpunkt (den Schaltpunkt des Sensors) im Objektstrich definieren.
Gemäß der Kurve der magnetischen Flussdichte über der Distanz in Abbildung 5 kann eine gegebene magnetische Flussdichte durch zwei verschiedene Verschiebungen erzeugt werden. Aus diesem Grund wird die obige Anordnung normalerweise in Anwendungen verwendet, bei denen der mechanische Aufbau das Verfahrwegende des Objekts so begrenzt, dass die Sensorumschaltung nur bei einer bestimmten Verschiebung erfolgen kann. Dadurch werden Unklarheiten bei der Interpretation der Ergebnisse vermieden.
Steigung der Gauß-Abstands-Kurve erhöhen
Wir haben oben besprochen, dass ein digitaler (ON/OFF) Hall-Effekt-Sensor mit der Slide-by-Konfiguration verwendet werden kann, um einen Referenzpunkt im Objektstrich zu definieren. Wenn wir die Steigung der Gauß-Abstands-Kurve erhöhen könnten, könnten wir den Referenzpunkt genauer erkennen.
Bei einer größeren Steigung führt eine gegebene Verschiebung zu einer größeren Änderung der magnetischen Feldstärke, die vom Sensor leichter erfasst werden kann. Abbildung 6(a) zeigt ein Magnetsystem, das eine größere Steigung aufweist als die Konfiguration in Abbildung 2(a).
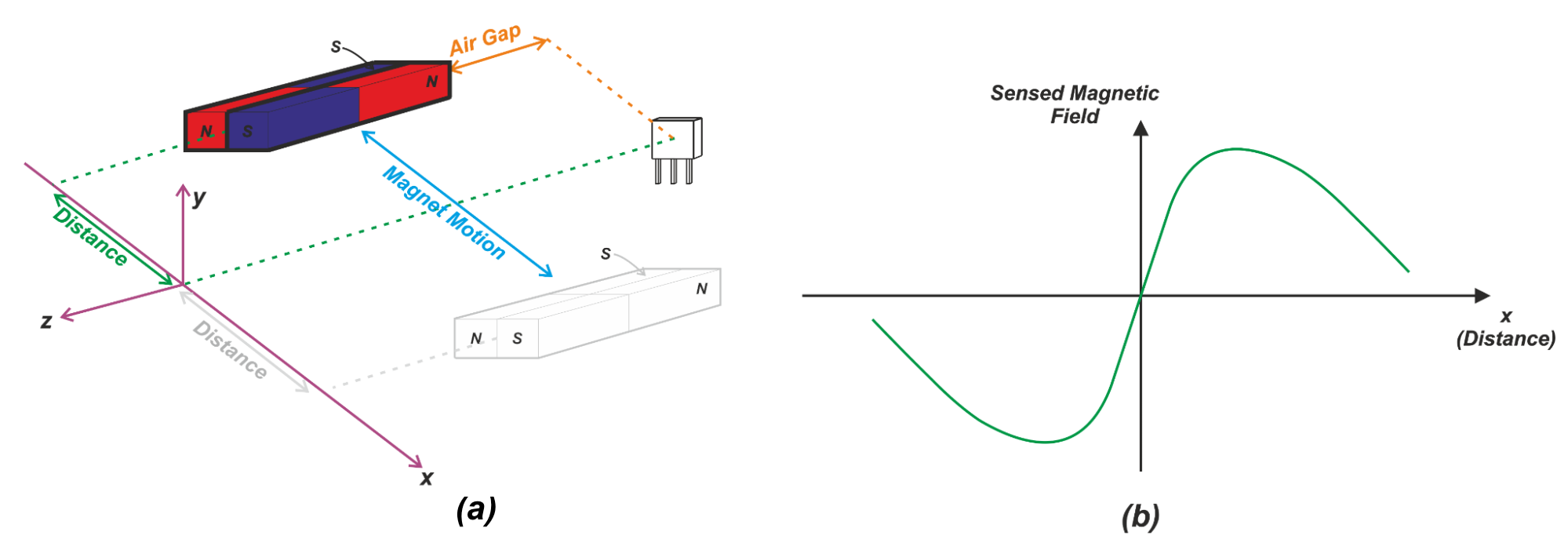
Abbildung 6. Verwendung mehrerer Magnete zur Erhöhung der Feldstärkeauflösung
Dabei werden Nord- und Südpol eines Magnetpaares relativ zum Sensor bewegt. Das Gesamtfeld wird durch die Feldlinien der beiden Magnete bestimmt. Bei dieser Anordnung wird der Abstand in Bezug auf die Mitte des Magnetpaares gemessen. 6(b) zeigt die z-Komponente des erfassten Magnetfelds über der Distanz. In der Mittelstellung (x=0) ist die Anzahl der Feldlinien vom Nordpol des einen Magneten, die durch den Sensor gehen, gleich der Anzahl der Feldlinien vom Südpol des anderen Magneten. Daher ist die magnetische Nettoflussdichte null.
Angenommen, wir bewegen den Magneten aus der Mittelposition (x>0) nach rechts. Dadurch wird die Anzahl der Feldlinien vom Südpol schlagartig erhöht und ein Magnetfeld mit positiver z-Komponente erzeugt. Wenn wir den Magneten von der Mittelposition (x<0) nach links bewegen, erhalten wir ein relativ starkes Magnetfeld mit einer negativen z-Komponente. Um den Ursprung herum ist die Steigung der Kurve höher als die der Slide-by-Konfiguration in Abbildung 2(a), da der Übergang vom Nord- zum Südpol abrupt erfolgt. Diese relativ größere Steigung der Gauß-Abstands-Kurve kann uns helfen, die Referenzposition eines sich bewegenden Objekts genauer zu definieren.
Es gibt zwei weitere interessante Varianten dieser Slide-by-Konfiguration. Eine Version trennt die beiden Magnete durch einen kleinen festen Abstand. Dies ermöglicht uns einen weniger abrupten Übergang vom Nord- zum Südpol und somit die Anpassung der Steigung der Antwort um den Ursprung. Eine andere Version verwendet eine Kombination von drei Magneten. Dies kann eine symmetrische Reaktion mit großen Steigungen in beide Richtungen erzeugen. Eine symmetrische Reaktion kann nützlich sein, wenn eine Abweichung von einer Mittellinie erkannt wird. Weitere Informationen zu diesen beiden Konfigurationen finden Sie im Handbuch „Hall Effect Sensing and Applications“ von Honeywell.
Um eine vollständige Liste meiner Artikel zu sehen, besuchen Sie bitte diese Seite.
Sensor
- Drosselklappensensor – Funktionsprinzip und Anwendungen
- Elektronik der Zukunft:schnelle Entwicklungsplattform für Wärmebild- und IR-Sensorik
- ADI:Impedanz- und Potentiostat-AFE für biologische und chemische Sensorik
- Infineon bringt monolithisch integrierten linearen Hallsensor für ASIL-D-Systeme auf den Markt
- Ambarella, Lumentum und ON Semiconductor arbeiten gemeinsam an KI-basierter 3D-Erkennung für AIoT-Geräte der nächsten Generation
- Selbstheilende Materialien mit weicher Wahrnehmung für Roboterhände und -arme
- Executive Roundtable:Sensorik und IIoT
- Graphenbasierte Photonikgeräte für die Fernerkundung
- Anschlüsse für die Steuerung:Kommunikationsschnittstellen für Positions- und Bewegungssensoren
- Messung von Magnetfeldern