


MIA-1 Open Source Advanced Handmade Humanoid Robot!
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 8 | ||||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hallo zusammen, heute zeige ich, wie ich den Roboter MIA-1 hergestellt habe, der nicht nur fortschrittlich und einzigartig ist, sondern auch Open Source und kann ohne 3D-Druck hergestellt werden! Ja, Sie haben es verstanden, dieser Roboter ist komplett handgefertigt. Und Open Source bedeutet - Sie erhalten Sie die Codes und alle Details kostenlos , auch du kannst diesen Roboter herstellen, wenn du möchtest.
Hier sehen wir nur ihre Rede, aber sie kann noch viel mehr!
Hier sind die Dinge, die sie tun kann:
- Kann dir zuhören und mit dir sprechen
- Kann dich mit der Kamera ihres linken Auges sehen und erkennen
- Kann Bewegungen erkennen und Fotos aufnehmen
- Hat eine GUI mit Touchscreen-LCD, um ihr Befehle zu erteilen
- Zeigt Bilder auf ihrem LCD an
- Laden Sie Bilder und Shows auf ihrem Bildschirm herunter
- Kann Dinge mit einem Laserpointer an ihrer rechten Hand anvisieren
- Bewegt die Hände beim Sprechen
- steht ohne fremde Hilfe auf den Beinen
- Sie kann sich auch verbeugen (Video ansehen)
- Und vieles mehr!
Zubehör:
Um diesen Roboter herzustellen, habe ich alle Dinge verwendet, die in unserem lokalen Geschäft erhältlich sind.
Mikrocontroller + Computer (Das Gehirn):
- Arduino Mega (zur Steuerung der Servomotoren)
- Ein vollwertiger Computer (Sie können Raspberry Pi verwenden, aber ich verwende zunächst meinen Laptop als ihr Gehirn)
Servomotoren:
MIA-1 hat 13 Freiheitsgrade.
- LDX227 Doppelachsen-Servomotoren 8x
- MG996r / MG996 Servomotoren 3x
- Für Figuren habe ich das Mikroservo sg90 verwendet
Beachten Sie, dass ich eine Roboterklaue hinzugefügt habe und sie einen anderen MG996r-Servomotor verwendet.
Und Überbrückungsdrähte usw.
Vision:
Für die Bildbearbeitung wie das Aufnehmen von Fotos und das Erkennen von Gesichtern usw. habe ich eine USB-Kamera verwendet .
Schritt 1:Karosserie- und Motorlayout
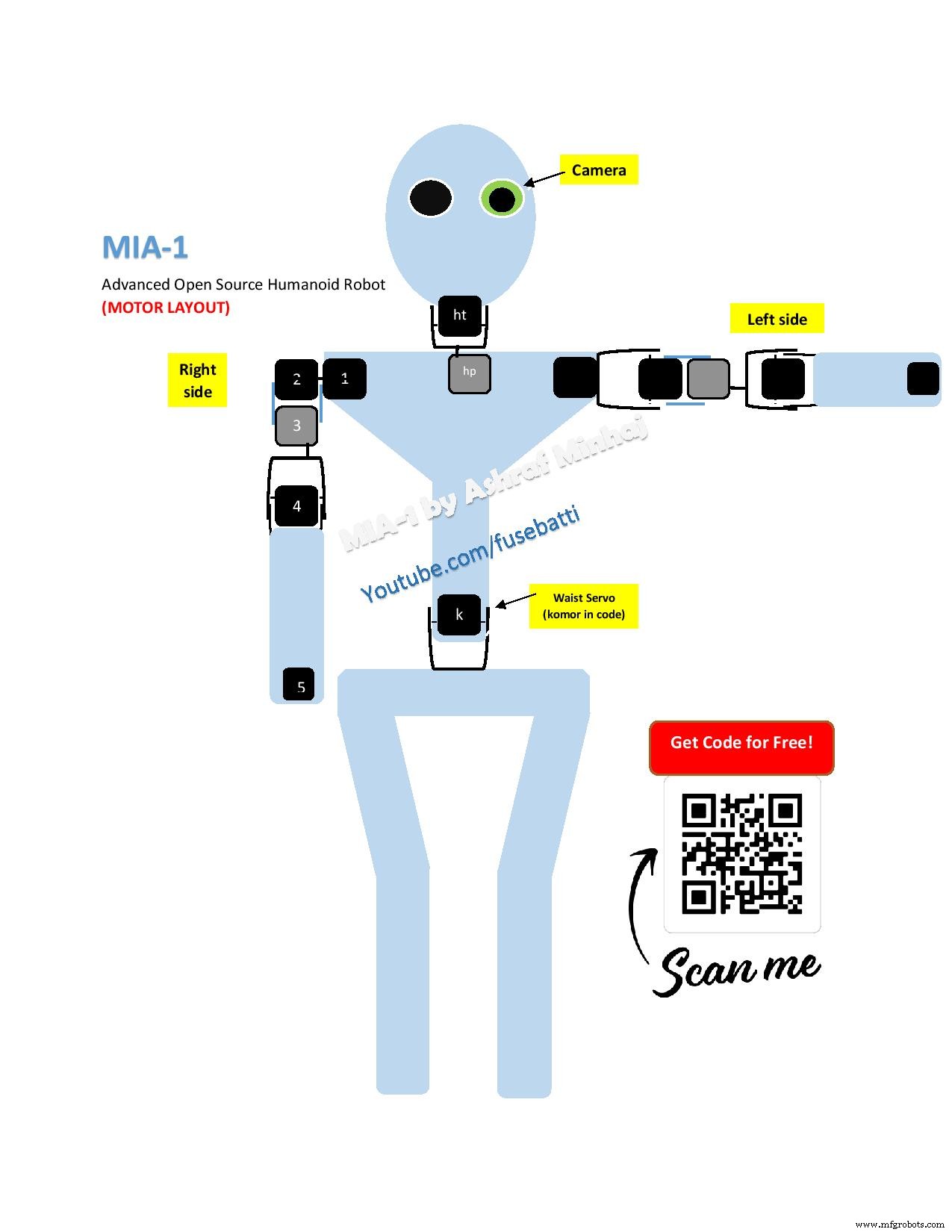

Der Körper besteht aus PVC-Folie verschiedene Teile werden mit Heißkleber befestigt und Schrauben (siehe Bild). Ich habe das PVC-Blatt mit einem Cuttermesser geschnitten (seien Sie sehr vorsichtig!! schneiden Sie sich nicht stattdessen in die Finger!!). Aus Bild eins und zwei sehen Sie das Servo-Layout. Als ich einen Mädchenroboter baute, habe ich ihm eine weibliche Körperform und Figur gegeben.
Die Servoanschlüsse werden aus dünnen PVC-Platten hergestellt, da sie sich gut biegen lassen.
Der Kopf wird mit einem Ballon hergestellt, Luft in den Ballon geblasen (siehe Bild), kleine nasse Papierstücke hinzugefügt und dann getrocknet. Nach dem Hinzufügen von 8 Schichten ist es stark und nachhaltig geworden.
Dann einfach weiß (ganzer Körper) mit Sprühfarbe einfärben.
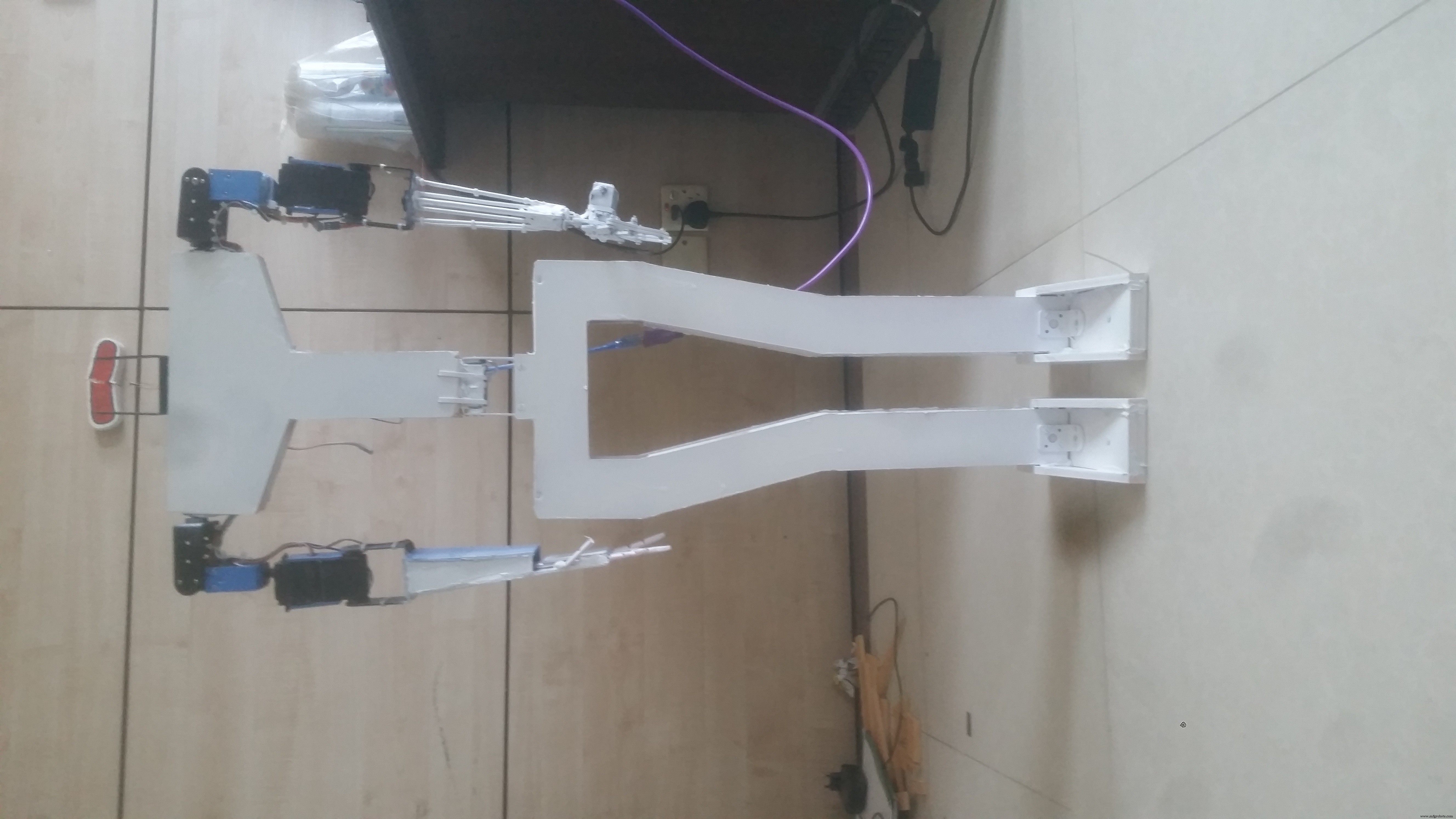
Es stellte sich heraus, dass das Design so erstaunlich ausgewogen ist und sie (MIA-1) direkt auf zwei Füßen von ihr steht!!
Display hinzufügen:
Danach habe ich nur ein paar Schrauben und Heißkleber verwendet, um das LCD auf ihrer Brust zu befestigen (letztes Foto).
Schritt 2:Schaltplan
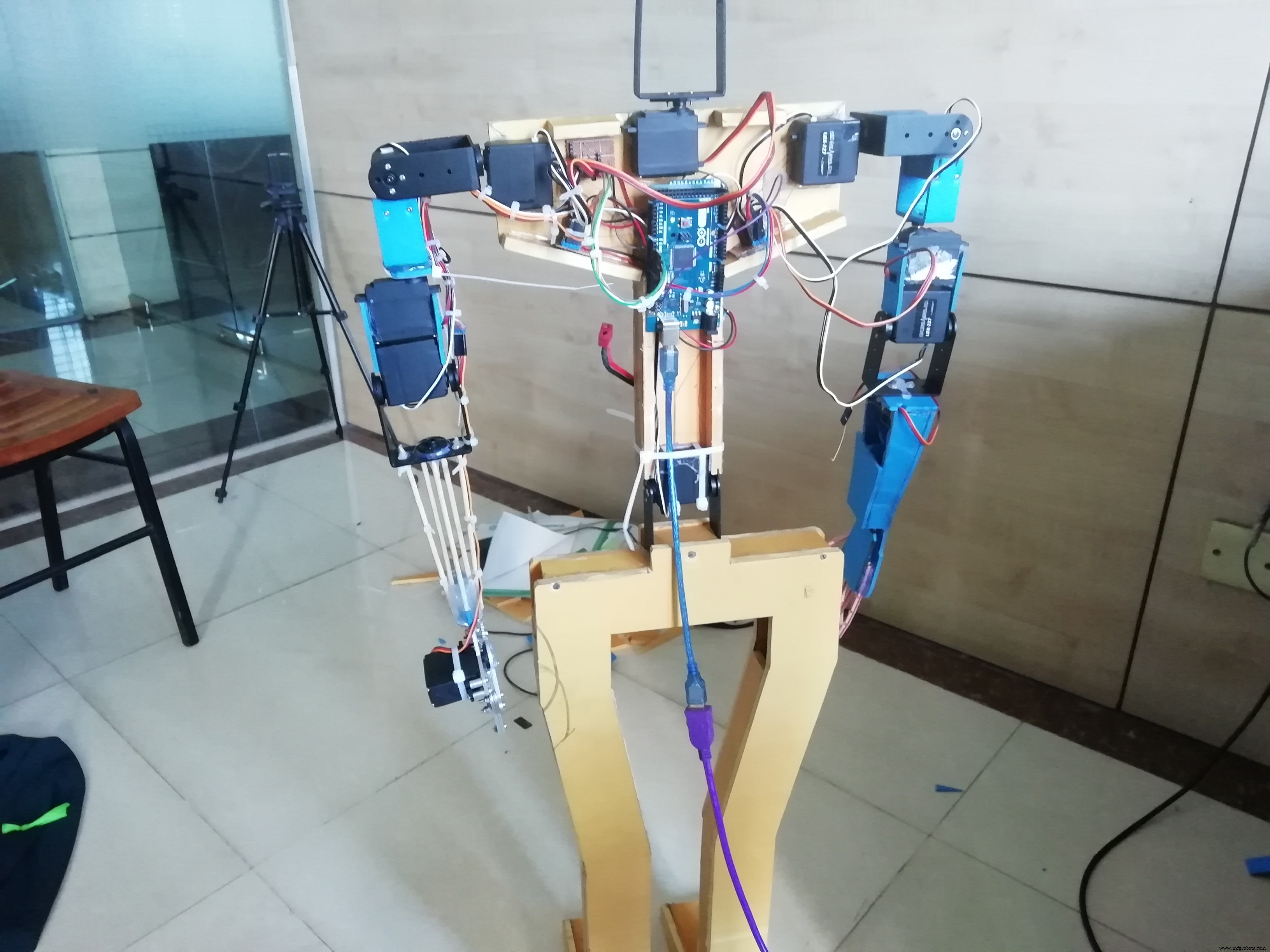
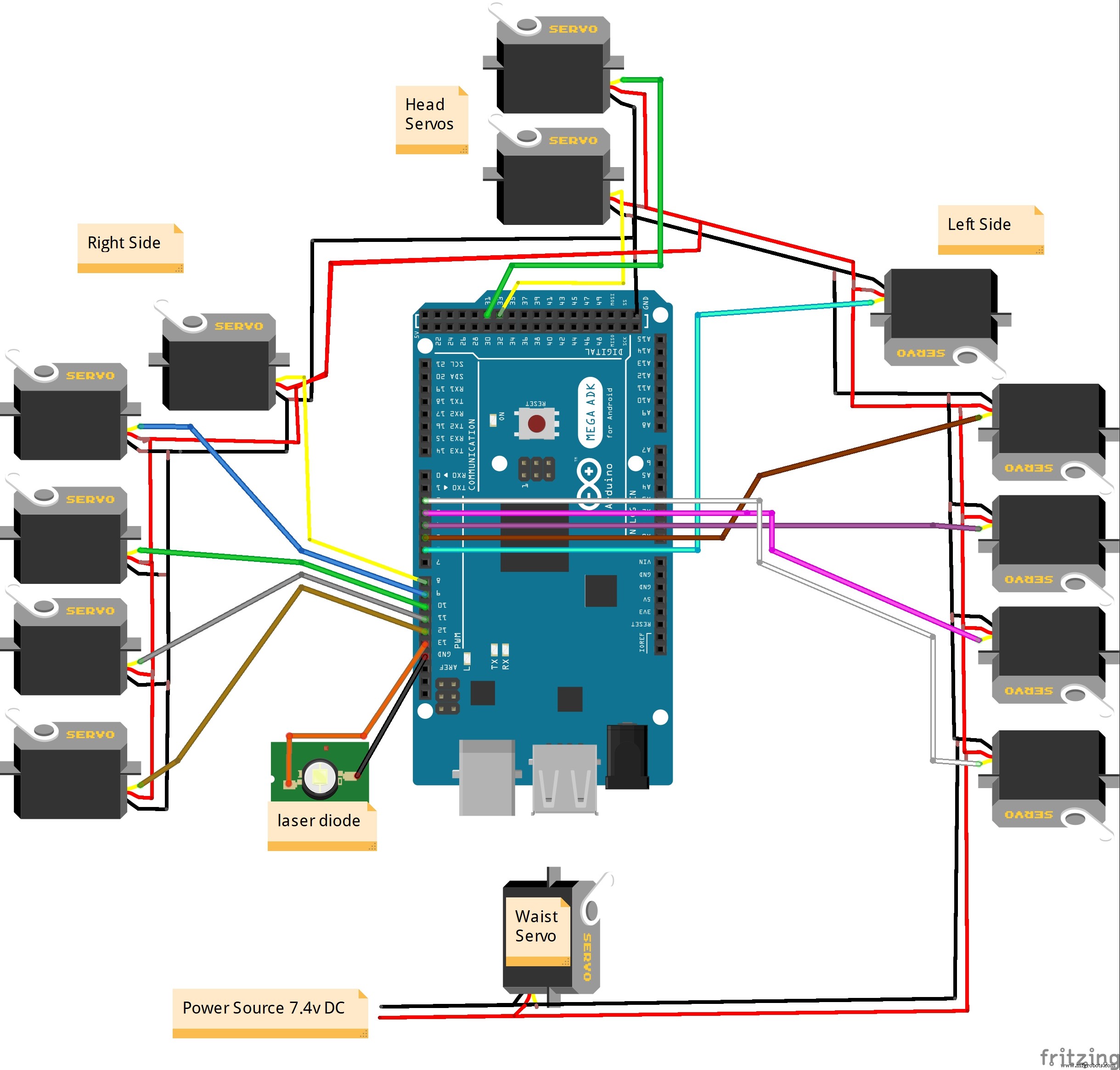
Der Schaltplan sieht komplex aus, ist es aber nicht. Ich habe die Schaltung als Motorlayout auf die Karosserie gezeichnet, damit Sie es leichter verstehen können. Stellen Sie sicher, dass Sie den Boden gemeinsam haben. Das Arduino wird über sein USB-Kabel vom Computer mit Strom versorgt. Es gibt eine Laserdiode, die es mia ermöglicht, auf Dinge zu zielen, die Strom von Pin 13 (LED-Pin) von Arduino nimmt.
Wie Sie sehen können, befinden sich alle Motoren und das Arduino selbst auf der Rückseite des Körpers. Ich habe auch alle Kabel von hinten verlegt. Habe ein verlängertes USB-Kabel gekauft, damit es an den Computer angeschlossen werden kann.
Schritt 3:Der CODE
Wie Sie wissen, habe ich ein Arduino-Mega verwendet. Der arduino mega steuert die Servomotoren, die Motoren sind vorprogrammiert. Holen Sie sich den Motorcode von hier. Bitte beachten Sie die voreingestellten Servopositionen, während Sie den Roboter bauen, behalten Sie diese bei. Schalten Sie die Motoren einfach mit Arduino ein, ohne den Körper zu machen, und die Servomotoren erreichen die Standardposition (Standardposition unten)
/*Standard-/Standby-Position der Servos*/
komor.write(4); #taillenservo
left1.write(120);
rFinger.write(0);
servo1.write(55);
clawOpen();
rightStandBy();
leftStandBy();
headTilt.write(134);
headPan.write(90); Der Motorsteuerungscode umfasst mehr als 750 Zeilen (Vorsicht beim Bearbeiten).
Die Hauptverarbeitung erfolgt mit einem Python3-Skript.
Python verfügt über eine pySerial-Bibliothek, die über seriell mit dem Arduino kommuniziert. Achten Sie auf den 'COM PORT'.
#Verbindung mit mia-Motortreiberplatine über serielle Kommunikation
versuchen:
mia =serial.Serial("COM28", 9600)
außer:
bestanden Sie müssen diese Bibliotheken auch pip installieren
"""erforderliche Bibliotheken importieren"""
#Import-Anfragen #zum Erstellen von Post/Get-Anfragen
importieren von pyttsx3 #offline-Text in Sprache
importieren von voice_recognition als sr #Speech to Text (erfordert Internet, um zu funktionieren)
Importzeit
von zufälligem Import randint #zufällige Integer-Auswahlbibliothek
tkinter importieren #tkinter GUI-Bibliothek
von tkinter importieren Tk, Button, Label, Tk #notwendige Dinge importieren
Serielle #serielle Bibliothek für die serielle Kommunikation über USB importieren
von PIL importieren Bild #von Bild anzeigen
cv2 importieren #Bibliothek für Computer Vision
wikipedia importieren #um Daten zu erhalten direkt von Wikipedia Alles ist einfach mit pip install. Für opencv Geben Sie in die Eingabeaufforderung ein:
pip install opencv-contrib-python Die GUI (Graphical User Interface), die Sie sehen, wurde mit tkinter entwickelt. Für diese und alle anderen Bibliotheken können Sie mit diesem Befehl installieren:
pip install library_name dann wird es installiert.
Schauen Sie auch nach, wenn Sie eine Webcam verwenden, ist es wahrscheinlicher, dass die Kamera mit 1 gekennzeichnet ist
cap =cv2.VideoCapture(1) #camera Und wenn Sie mehr darüber erfahren möchten, wie dieser Roboter tatsächlich spricht, lesen Sie bitte diese Tutorials.
Der Code von MIA-1 ist nur eine erweiterte Version davon.
Ab dem Befehl des Arduino sendet der Computer einen Biss, der Arduino führt Aktionen entsprechend den erhaltenen Bissen aus, daher sieht es so aus, als ob Mias Bewegung und Sprechen asynchron sind.
mia.write(b'p') #Befehl nach oben und dann nach unten
count_down(3)
respond("Lächle bitte", 100) Um den Code zu erhalten, gehen Sie jetzt auf den folgenden Link.
Laden Sie den Code von MIA-1 hier herunter.
Schritt 4:Power und Finishing
Ich habe den Roboter mit einem 7,4 V Lipo-Akku betrieben. Die LDX227-Servos sind sehr leistungshungrig (aber von guter Qualität), also stellen Sie sicher, dass sie jederzeit mindestens 7,3 V erreichen. Andererseits sind die MG996r-Servomotoren billig und können leicht beschädigt werden. Stellen Sie sicher, dass sie nicht mehr als 7,8 V erhalten. Daher sollte die höchste Stromversorgung für diesen Roboter zwischen 7,4 und 7,8 Volt liegen.
Viel Spaß beim Machen! Wenn Ihnen dieser Roboter gefällt, unterstützen Sie ihn, indem Sie den Kanal für weitere tolle Projekte abonnieren.
Code
Vollständigen Code kostenlos herunterladen
ashraf-minhaj/MIA-1-Open-Source-Humanoid-Roboterhttps://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RoboterSchaltpläne
MIA-1-Schaltung
https://github.com/ashraf-minhaj/MIA-1-Open-Source-Humanoid-RobotHerstellungsprozess
- Einführung in die Open-Source-Terminologie
- Erweiterte Servomotoren für die Transformation des 3D-Metalldrucks
- Ein Projektprotokoll für FirePick Delta, die Open Source MicroFactory
- Artikel:Lernen Sie OAP kennen – ein offenes Roboter-Referenzdesignprojekt
- Intellisaurus – Dinosaurier-Roboter-Kit
- Offener CV-Roboter
- Einfacher Pi-Roboter
- AT&T, Tech Mahindra arbeiten an einer neuen Open-Source-KI-Plattform zusammen
- Softwarerisiken:Sicherung von Open Source im IoT
- Open-Source-IoT-Entwicklungstools im Vergleich zu anbieterunterstützten Tools