


u-blox LEA-6H 02 GPS-Modul mit Arduino und Python
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Anbindung des GPS-Moduls (ich habe LEA-6H 02 verwendet) mit einem Arduino UNO (oder einem anderen Arduino-Gerät) und Berechnung von Breiten- und Längengrad zur Anzeige im in Python geschriebenen Anwendungsfenster.
Schritt 1:Holen Sie sich ein u-blox LEA-6H 02 GPS-Modul, lesen Sie die Datenblattspezifikationen und machen Sie das Modul bereit für die Verbindung mit Arduino
- Lesen Sie das Datenblatt zu u-blox LEA 6 sorgfältig durch und stellen Sie sicher, dass Ihr Modul korrekt ist
- Die meisten Module arbeiten mit ~ 2,7 bis 3,6 V , also stellen Sie sicher, dass Sie die richtige Stromquelle haben. Ich habe den Arduino 3,3-V-Pin verwendet
- Alle Module unterstützen den UART-Kommunikationsport, daher werden wir ihn als Schnittstelle zu Arduino verwenden
- Module werden standardmäßig mit Micro-Buchsen geliefert, die ich schwer an Arduino anschließen kann. Daher habe ich sie durch eine 2,54 mm Jumper-Draht-Buchse ersetzt (bevor Sie sie ersetzen, stellen Sie sicher, dass Sie wissen, welcher Pin was tut, und erstellen Sie ein Pin-Diagramm auf Papier oder Computer)
- Jetzt kann dieses Modul mit Arduino verbunden werden
Schritt 2:GPS-Modul mit Arduino verbinden
Verbinden Sie Tx und Rx des GPS-Moduls mit Rx und Tx von Arduino
- Tx von GPS (grünes Kabel in meinem Fall) an => Rx von Arduino
- Rx von GPS (gelber Draht in meinem Fall) zu => Tx von Arduino
- Identifizieren Sie Tx (Sender) und Rx (Empfänger) des GPS-Moduls und dasselbe auch auf Arduino (ich habe UNO verwendet, damit es nur 1 UART-Kommunikationsport hat, Tx auf Pin0 und Rx auf Pin1, mehr Spezifikationen auf Arduino UNO)
Achtung:Stellen Sie sicher, dass Sie nicht mehr als 3,3 V (max. 3,6 V) an Ihr GPS-Modul anlegen und lesen Sie die Anleitung sorgfältig durch.
Schritt 3:Laden Sie das Arduino-Programm hoch, um den seriellen (Kommunikations-) Port zu lesen
- Der Code für dieses Projekt befindet sich im GitHub-Repository
- Link:https://github.com/harshgosar/LEA-6h-GPS-Arduino-Python
- Bitte lesen Sie die Datei README.md
Beobachten Sie die Reaktion auf dem Bildschirm
- Die gültige Antwort kann einige Zeit in Anspruch nehmen und hängt von der vom GPS-Modul empfangenen Signalstärke ab
- Halten Sie das GPS-Modul in der offenen Umgebung oder in der Nähe des Fensters
- Installieren Sie die u-center-Software wie in der obigen README.md-Datei angegeben
- Laden Sie Arduino-Code in das Arduino-Modul hoch
- GPS-Pins mit Arduino verbinden
- Öffnen Sie den seriellen Monitor auf der Arduino IDE und beobachten Sie die Ausgabe des GPS-Moduls, stellen Sie sicher, dass es eine sinnvolle Ausgabe gibt
- Trennen Sie die serielle Schnittstelle von Arduino, indem Sie den seriellen Monitor schließen und öffnen Sie nun die u-center-Software und wählen Sie die serielle Schnittstelle von Arduino aus
Schritt 4:Führen Sie den Python-Code aus
- Laden Sie Python herunter und konfigurieren Sie es auf Ihrem lokalen Computer
- Laden Sie Python-Code herunter, um GPS-Daten über den seriellen Kommunikationsanschluss Ihres Geräts zu lesen
- GPS mit Arduino verbinden und mit Strom versorgen
- Identifizieren Sie den COM-Port, mit dem Arduino verbunden ist
- Python-Code ausführen
- Comport-Details eingeben
- Überprüfe die Längen- und Breitenangaben
Code
Github
https://github.com/harshgosar/LEA-6h-GPS-Arduino-Pythonhttps://github.com/harshgosar/LEA-6h-GPS-Arduino-PythonLEA-6h-GPS-Arduino-Python
Arduino-Code zum Hochladen auf den Mikrocontroller und Python-Code für die Schnittstellehttps://github.com/harshgosar/LEA-6h-GPS-Arduino-PythonSchaltpläne
GPS- und Arduino-Verbindung Bilder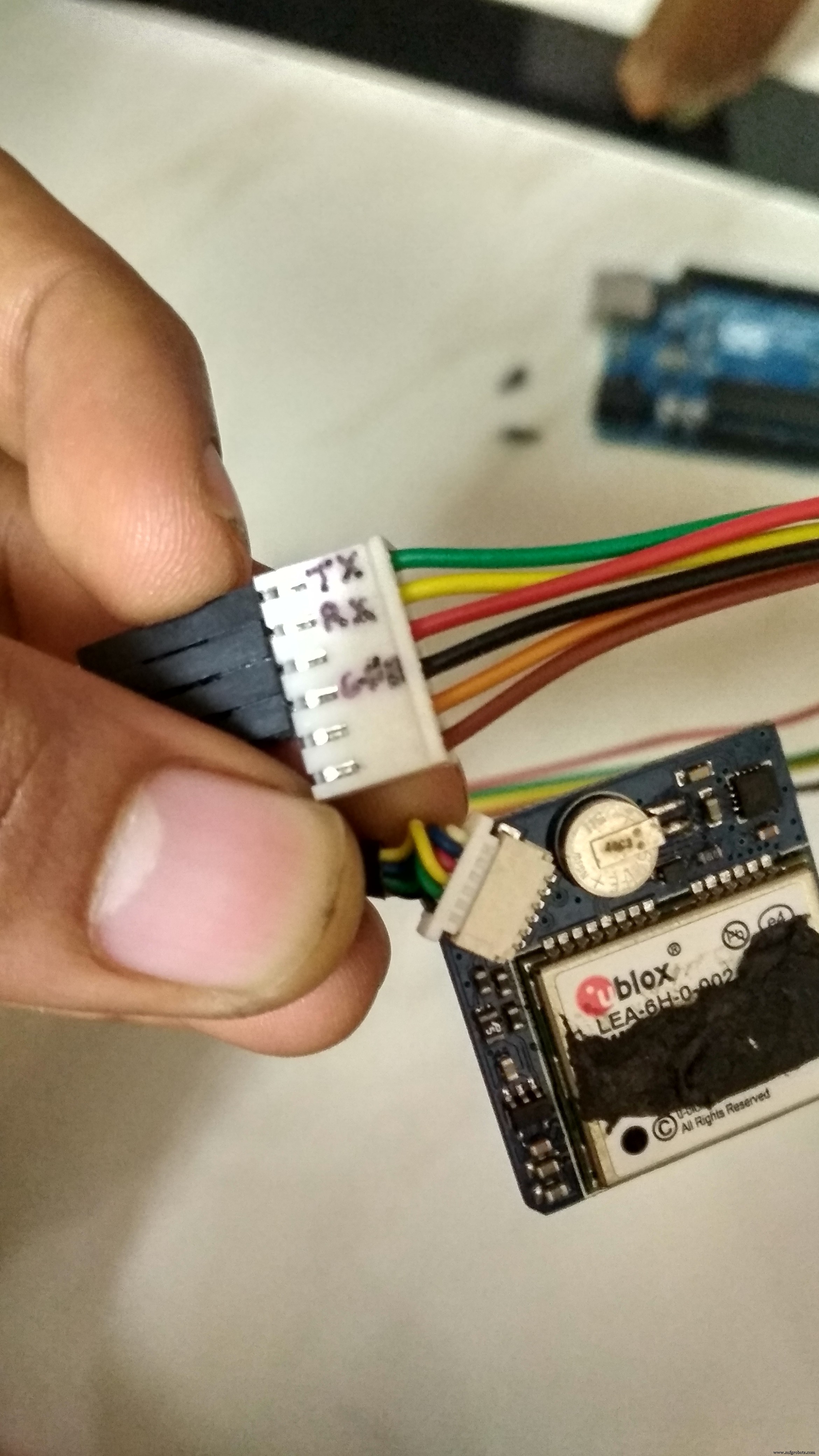 GPS- und Arduino-Verbindung Image2
GPS- und Arduino-Verbindung Image2 
Herstellungsprozess
- Roboter bauen mit Raspberry Pi und Python
- Modul in Python mit Beispielen importieren
- Einfangen der Wassertropfen mit Arduino
- Anwesenheitssystem mit Arduino und RFID mit Python
- DHT11-Sensor mit LEDs und einem Piezo-Lautsprecher
- Arduino-Temp. Monitor und Echtzeituhr mit 3.2 Display
- Wie man Arduino Mega mit dem NEO-6M GPS-Modul verbindet
- Steuerung des Servomotors mit Arduino und MPU6050
- Spracherkennung und -synthese mit Arduino
- GPS-Standortanzeige mit GPS- und TFT-Display-Schilden