


Arduino-gesteuerter Flipper
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Über dieses Projekt
Arduino-gesteuerter Flipper
Der Bau eines Arduino-gesteuerten Flipperautomaten erforderte eine Kombination aus Holzbearbeitungs-, Mechanik-, Elektronik- und Programmierkenntnissen. Die Erstellung dauerte ungefähr sechs Monate in Teilzeit und war das komplizierteste, was ich je gebaut habe. Dies liegt hauptsächlich daran, dass ich nicht viele Informationen zum Bau eines Flipperautomaten finden konnte.
In diesem Dokument wird beschrieben, wie diese Maschine gebaut wurde. Ich werde versuchen, genügend Referenzen bereitzustellen, damit Sie es leichter haben als ich, wenn Sie sich entscheiden, Ihre eigenen zu bauen. Gleichzeitig kann ich nicht genug betonen, dass alles getestet werden muss. Ich benutzte ein Ersatzteil Sperrholz, um jede Komponente zu prototypisieren, bevor ich sie in die eigentliche Maschine einbaute. Das wird dir auf lange Sicht viel Kummer ersparen.

Wie Sie auf dem Bild sehen können, hat der Automat ein Holzgehäuse und verwendet handelsübliche Flipper-Ersatzteile. Die Maschine wird von einem einzigen Arduino Mega 2560-Board gesteuert. Wenn Sie die Maschine in Aktion sehen möchten, gehen Sie zu diesem Link oder sehen Sie sich hier an:
Der Fall
Das Gehäuse besteht aus Sperrholz mit Eichenfurnier, das im Baumarkt gekauft wurde. Alle Abmessungen in diesem Dokument sind in Zoll angegeben. Die Vorder- und Rückseite sind 20H x 23W. Die Seitenwände sind 20H x 47L. Die Stücke wurden mit Gehrung geschnitten und mit einem Keksverbinder und Holzleim verbunden. Taschenschrauben und Kleber hätten auch funktioniert. Die Maschine wird viel Missbrauch aushalten, also muss sie stark sein. Bevor ich es zusammenfüge, schneide ich auch einen ¾ "Dado 1 Zoll von unten nach oben. Kleben Sie das Regal nicht. Es muss schwimmen, um Expansion und Kontraktion zu ermöglichen. Die Ablage diente zur Aufnahme des Hauptnetzteils und des Netzteils für die unter dem Deckel montierte dekorative LED-Leuchte. Die Spielfläche beträgt 22 x 42 L. Beachten Sie, dass es deutlich kürzer ist als das Gehäuse. Dies gibt mir ungefähr 3 Zoll vorne, um Drähte zu den Flipperknöpfen und zu den LED-Leuchten zu führen. Es bietet auch Platz für den Kugelkolbenmechanismus. Die Spielfläche ruht einfach auf einigen kleinen Holzklötzen, die an den Seiten etwa 10 cm unter der Oberseite des Gehäuses angeschraubt sind. Um an das Herz der Maschine zu kommen, öffne ich einfach den Deckel, entferne das Spielfeld und drehe es um.

Das Gehäuse und die Spielfläche sind alle im rechten Winkel gebaut. Das Spielfeld wird durch die Beine bereitgestellt, wie in dieser Seitenansicht gezeigt. Flipperautomaten können Winkel von 1 bis 7 Grad haben. Je höher der Winkel, desto schneller das Spiel. Da ich mir nicht sicher war, welchen Winkel ich brauche, habe ich die Beine so gestaltet, dass sie verstellbar sind. Die Beine selbst sind aus Holz und in den meisten Baumärkten erhältlich. Ich bohrte dann ein Loch 12 Zoll tief in das Ende jedes Beins mit einem Schneckenbohrer. Am unteren Ende habe ich ein Zweikomponenten-Epoxid verwendet, um eine 3/8-Zoll-T-Mutter einzusetzen. Achten Sie darauf, dass kein Kleber auf die Gewinde gelangt oder das Loch blockiert, das Sie gebohrt haben. Dann steckte ich eine 12 Zoll 3/8 Zoll Gewindestange in das Bein und ich schraubte eine Mutter auf die Stange. Am Ende habe ich dann einen Nivellierfuß befestigt. Den Nivellierfuß und die T-Muttern habe ich unter den folgenden Links erhalten.
http://www.mscdirect.com/product/details/40610032
http://www.mscdirect.com/product/details/67300962
Die Tischbein-Befestigungsplatten wurden einfach an die untere Ablage geschraubt und die Beine eingeschraubt. Um die Höhe der Maschine einzustellen, einfach die Mutter lösen und dann die Gewindestange hinein- oder herausdrehen. Ziehen Sie dann die Mutter wieder an, um sicherzustellen, dass der Tisch sicher bleibt.
Auf dem Bild sehen Sie ein Stromkabel und ein USB-Kabel. Das Stromkabel kommt von einer Steckdosenleiste, die ich an der Rückseite der Maschine befestigt habe. Dort wird alles eingesteckt, so dass ein Schalter alles ein- oder ausschaltet. Das USB-Kabel ist dabei, damit ich das Arduino-Board neu programmieren kann, ohne das Spielfeld entfernen zu müssen.
Der Deckel
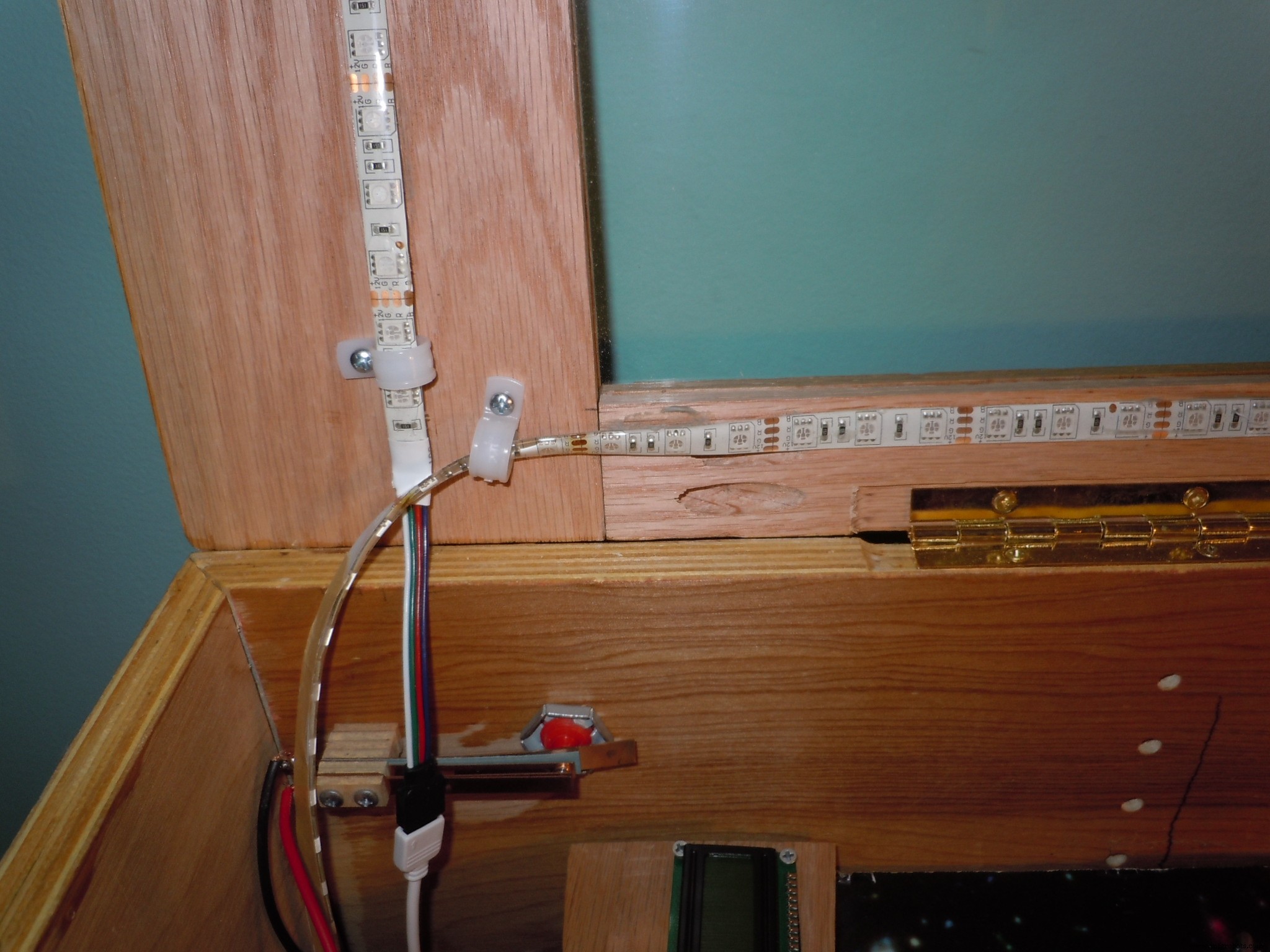
Der Deckelrahmen ist aus Eichenholz und hat das gleiche Außenmaß wie der Schrank. Die Oberseite und die Seiten sind 1,5 Zoll breit, während die Unterseite 5 Zoll breit ist. Die zusätzliche Breite an der Unterseite wird verwendet, um die Lücke zwischen dem Spielfeld und dem Gehäuse zu verbergen. An der Innenkante der Rahmenteile wurde ein Dado entlanggeführt, um die Plexiglasabdeckung zu halten. Ich habe Plexiglas anstelle von Glas verwendet, weil es leichter, sicherer und einfacher zu schneiden ist. Der Deckel wurde mit Taschenschrauben zusammengebaut. Ich tat dies, damit ich es auseinandernehmen konnte, falls das Plexiglas jemals ersetzt werden musste. Zur Dekoration habe ich noch einen Streifen aus bunten LED-Leuchten unter dem Deckel angebracht. Schließlich habe ich den Deckel mit einem Klavierscharnier am Gehäuse befestigt, das ich sowohl in den Deckel als auch in das Gehäuse eingelassen habe.
Arduino
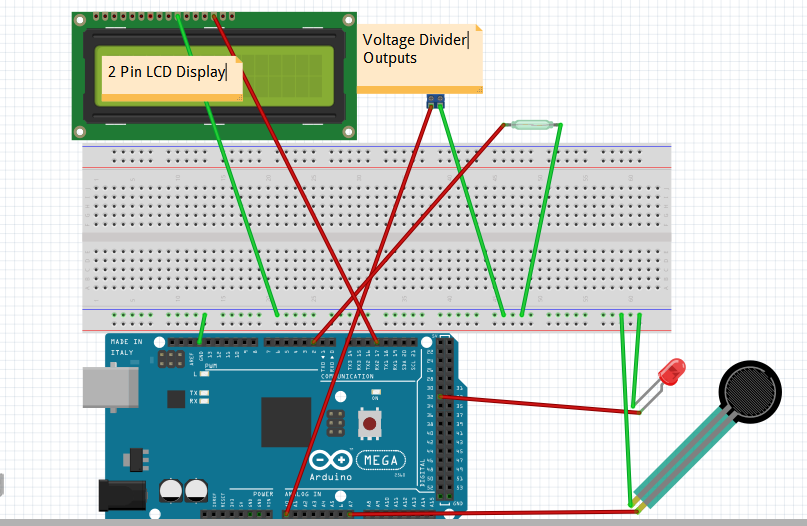
Der Arduino Mega 2560 macht im Grunde vier Dinge. Es bestimmt, wann Schalter aktiviert werden, es schaltet die Lichter entsprechend ein oder aus, es verfolgt den Punktestand und zeigt den Punktestand und die Ballnummer auf einem kleinen LCD an. Die meisten Verkabelungen sind ziemlich einfach. Die Targets werden beispielsweise mit einem der digitalen Eingänge des Arduino und mit Masse verbunden. Der Eingang wird mit einer Anweisung wie unten gezeigt konfiguriert.
pinMode(Pin_Number,INPUT_PULLUP)
Wenn der Code erkennt, dass sich der Eingang von hoch auf niedrig geändert hat, weiß er, dass das Ziel getroffen wurde und schaltet dann das entsprechende LED-Flipperlicht ein.
Die einzige Komplikation dabei ist von den Pop Bumpers. Die Rollover-Schalter und Ziele, die in diesem Spiel verwendet werden, beziehen ihre Kraft alle vom Arduino. Die Pop Bumpers werden von einem separaten 25-Volt-Netzteil versorgt, da sie mehr Saft benötigen, als der Arduino liefern kann. Die Pop Bumpers haben zwar einen Schalter, der sie aktiviert, aber ich kann ihn wegen der hohen Spannung nicht direkt ablesen. Folglich schicke ich zuerst den Ausgang des Pop-Bumper-Schalters an einen Spannungsteiler. Ein Beispiel für einen Spannungsteiler finden Sie im folgenden Link.
Spannungsteiler
Durch den Spannungsteiler wird die Spannung auf 5 Volt reduziert und der Arduino kann damit umgehen. Ich habe festgestellt, dass ich damit weniger falsche Messwerte bekomme, wenn ich die analogen Eingänge verwende, da die Spannungsteiler immer etwas Strom verlieren. Mit den analogen Eingängen konnte ich überprüfen, ob ein Schwellenwert überschritten wurde, um ein Signal leicht von Rauschen zu trennen.
Wenn während des Spiels alle Geräte eines bestimmten Typs (Target, Pop-Bumper oder Rollover) aktiviert waren, habe ich den Arduino so programmiert, dass alle Lichter für diese Geräte blinken und dann die Punktzahl für sie erhöht wurde.
Ich habe auch einen kleinen Kraftsensor verwendet, um zu erkennen, wann ein Ball verloren ging. Dadurch kann ich die Anzahl der gespielten Bälle verfolgen und feststellen, wann das Spiel vorbei ist. Wenn das Spiel vorbei ist, blinken alle Lichter nacheinander.
Schließlich habe ich das Arduino verwendet, um die Punktzahl und die Ballnummer anzuzeigen.
Der beigefügte Schaltplan zeigt, wie eine der Hauptkomponenten verdrahtet wurde. Das Diagramm wäre zu verwirrend, wenn alle angezeigt würden.
Netzteil
Um die Flipperkomponenten mit Strom zu versorgen, habe ich ein 24-Volt-Netzteil verwendet. Dieses Gerät hatte viel Kraft für die Flossen und die Sidekicks. Es ist ein wenig schwach für die Pop-Stoßfänger. Möglicherweise möchten Sie hierfür ein stärkeres Netzteil verwenden. Wenn Sie dies tun, müssen Sie Ihre eigenen Spannungsteiler herstellen, da ich nur solche mit maximal 25 Volt finden konnte. Informationen zum Herstellen eines Spannungsteilers finden Sie hier.
Anstatt alles direkt an die Stromversorgung anzuschließen, habe ich Drähte zu einem Paar Stromschienen geführt, die ich an der Unterseite des Spielfelds montiert habe. Dies machte es viel einfacher, die verschiedenen Komponenten zu verbinden. Auf dem zweiten Bild im Abschnitt Slingshot sehen Sie eine der Stromschienen. Sie sind im Baumarkt in der Elektroabteilung erhältlich.
Ball Shooter oder Plunger
Der Ball-Shooter oder -Plunger wurde unter folgendem Link gekauft
http://www.marcospecialties.com/pinball-parts/B-12445
Ein Loch muss durch die Vorderseite des Gehäuses gebohrt werden, damit der Kolben hindurchpasst. Anschließend wird es in das Gehäuseinnere eingeschraubt. Es muss sehr sorgfältig darauf geachtet werden, dass der Kolben richtig mit dem Spielfeld ausgerichtet ist. Legen Sie ein Lineal auf das Spielfeld und markieren Sie die Stelle, an der es auf die Innenseite des Gehäuses trifft. Gehen Sie dann so weit nach oben, dass die Mitte des Kolbens der halben Höhe des Flippers entspricht. (Flipper sind 1 und 1/16 Zoll groß und bei Pinball erhältlich.)
Spielfeld
Das Spielfeld besteht aus ¼ Zoll Birkensperrholz. Um das Spiel dekorativer zu gestalten, habe ich ein Bild über den Nasa-Link unten gekauft.
http://hubblesite.org/gallery/printshop/ps35/
Zuerst habe ich das Sperrholz mit Kontaktkleber besprüht und dann das Poster darauf laminiert. Ich habe es dann umgedreht und zurechtgeschnitten.
Flossen
Die Flossen wurden unter dem folgenden Link gekauft.
http://www.pinballlife.com/index.php?p=product&id=172
Wenn Sie die meisten Flipper-Komponenten kaufen, werden sie in der Regel ohne nützliche Anweisungen geliefert. Die Art und Weise, die Flossen zu verdrahten, ist im Bild unten gezeigt. Es kam von diesem Link.
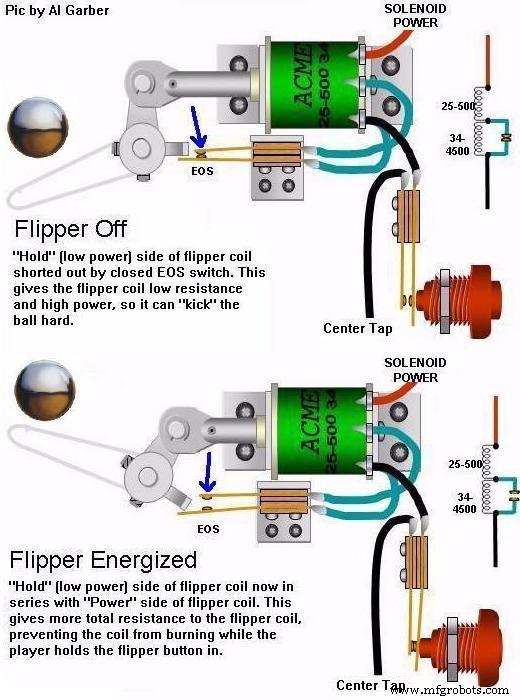
Zusätzlich zum Flippermechanismus benötigst du einen Flipperschläger, einen Flipperschalter und einen Knopf.
Schleudern
Eine vollständige Schleudermontage finden Sie hier. Sie benötigen auch Stifte und die Gummibänder. Sie finden sie an derselben Stelle. Außerdem wird ein Bild der Schleuder gezeigt, wenn sie darunter montiert ist. Ich sollte darauf hinweisen, dass für alle an die 24-Volt-Stromversorgung angeschlossenen Komponenten ein 16-Gauge-Draht und ein 22-Gauge-Draht für die Verbindungen zum Arduino-Board verwendet wurde.
Das erste Bild zeigt auch einige Metallschienen neben den Flipperschlägern. Ich konnte keinen Ort finden, um die Schienen zu kaufen, also habe ich sie gemacht. Ich habe einen Chromstahldraht verwendet, den ich im Baumarkt gefunden habe. Es wurde verwendet, um Rasen zu markieren, wenn sie mit Insektiziden besprüht wurden. Ich schneide und biege den Draht. Dann habe ich Löcher in das Spielfeld gebohrt und die Schienen mit Epoxidharz eingeklebt.


Pop-Stoßfänger
Pop-Stoßfänger-Baugruppen können hier erworben werden. Sie benötigen auch Schalter und Kappen. Pop-Bumper werden installiert, indem drei Löcher gebohrt werden, zwei für die Metallstützstangen und eines für die Welle, die den Schalter auslöst. Wenn eine Kugel in die weiße Scheibe in der Draufsicht rollt, drückt sie die Welle nach unten. Dadurch wird der Flügelschalter ausgelöst, der dann den Elektromagneten aktiviert. Der Elektromagnet zieht dann einen Metallring nach unten, der die Kugel in die entgegengesetzte Richtung schickt.


Ziele, Rollover-Schalter und Lichter
Die Ziele sind unter folgendem Link verfügbar.
http://www.marcospecialties.com/pinball-parts/A-14691-5
Rollover-Schalter und Halterungen finden Sie unten.
http://www.actionpinball.com/parts.php?item=A-12687
Die Lampen, die ich verwendet habe, werden nicht mehr hergestellt, aber Äquivalente sind unten gezeigt.
http://www.actionpinball.com/parts.php?item=LED4555
Sie benötigen außerdem die unten gezeigten Lampenhalterungen.
http://www.actionpinball.com/parts.php?item=077-5030-00
Die Verkabelung von all diesen ist im Grunde gleich und wurde im Arduino-Abschnitt erwähnt.
Zusammenfassung
Wenn Sie einmal angefangen haben, werden Sie zweifellos andere Schnickschnack finden, die Sie hinzufügen möchten, aber dies sollte Ihnen den Einstieg erleichtern.
Code
- Code für Arduino-Flipper
Arduino Flipper CodeArduino
Ermöglicht dem Arduino, das Spiel eines selbstgebauten Flipperautomaten zu steuernconst int TxPin =17; Long-Score =0; langer OldScore =0; langes Ziel =1; langer Pop =1; lange Rolle =10; int-Ziele[8]; int Rollen[3]; int Pops[4]; int Milli =10; int Summe =0; int Flash =100; int Ball =0; int i=0; int Schuss =0; int Verloren =0; int-Druck =1024; #include;SoftwareSerial mySerial =SoftwareSerial(255, TxPin);void setup() { /* Wörter ohne s sind der Wert, der durch die Interaktion mit einem Gerät erreicht wird. * Funktioniert mit einem s Verfolgen Sie, mit welchen Personen interagiert wurde. * Letzteres wird benötigt, um festzustellen, wann alle getroffen wurden und der Wert aktualisiert werden muss * und die Lichter ausgeschaltet werden müssen. */ pinMode (TxPin, AUSGANG); digitalWrite (TxPin, HOCH); mySerial.begin(9600); mySerial.write(12); // mySerial.write(17) löschen; // Hintergrundbeleuchtung einschalten // Zieleingaben pinMode (2, INPUT_PULLUP); pinMode(3,INPUT_PULLUP); pinMode(4,INPUT_PULLUP); pinMode(5,INPUT_PULLUP); pinMode(6,INPUT_PULLUP); pinMode(7,INPUT_PULLUP); pinMode(8,INPUT_PULLUP); pinMode(9,INPUT_PULLUP); // Rollover-Eingänge PinMode (10, INPUT_PULLUP); pinMode(11,INPUT_PULLUP); pinMode(12,INPUT_PULLUP); // Schalter für den unteren Ballschuss PinMode (15, INPUT_PULLUP); // oberer Ballschussschalter PinMode (16, INPUT_PULLUP); // LCD-Ausgang PinMode (17, OUTPUT); // Ziellichter, jeweiliger PinMode (32, OUTPUT); PinMode (33, AUSGANG); PinMode (34, AUSGANG); PinMode (35, AUSGANG); PinMode (36, AUSGANG); PinMode (37, AUSGANG); PinMode (38, AUSGANG); PinMode (39, AUSGANG); // Rollover-Lichter, jeweiliger PinMode (40, OUTPUT); PinMode (41, AUSGANG); PinMode (42, AUSGANG); // Stoßstangenlichter PinMode (50, AUSGANG); PinMode (51, AUSGANG); PinMode (52, AUSGANG); pinMode (53, OUTPUT);}void loop () { // Geben Sie Ihren Hauptcode hier ein, um ihn wiederholt auszuführen:// Wenn ein Pull-Down-Widerstand verwendet wird, ist der Eingangspin LOW, wenn der Schalter geöffnet ist, und HIGH, wenn der Schalter ist geschlossen. // prüfen, ob ein Ziel getroffen wurde // ***** Ziele ***** für (int i =0; i <8; i ++) { if (digitalRead (i + 2) ==LOW) {/ /Ziel aktivierte Ziele[i]=1; Punktzahl =Punktzahl + Ziel; // Ziellicht einschalten DigitalWrite (i + 32, HIGH); // verzögern, um nicht mehrere Punkte für einen Treffer zu erhalten Verzögerung (Milli); brechen; } } Summe =0; for (int i=0; i<8; i++){ Sum =Sum + Targets[i]; } if (Sum ==8) {//alle Targets beleuchtet, also blinken und dann ausschalten. für (int j =0; j <3; j ++) { für (int i =0; i <8; i ++) { digitalWrite (i + 32, LOW); } Verzögerung (Flash); für (int i=0; i<8; i++) { DigitalWrite (i+32, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<8; i++){ digitalWrite (i+32, LOW); Ziele[i]=0; } Verzögerung (Flash); // Zielwert mit 10 multiplizieren Ziel =Ziel * 5; //zu Überspringen; } // ********** Rollover ********* für (int i=0; i<3; i++) { if (digitalRead(i+10) ==LOW) { // Rollover aktiviert Rolls[i]=1; Punktzahl =Punktzahl + Würfeln; // Rollover-Licht einschalten DigitalWrite (i + 40, HIGH); // verzögern, um nicht mehrere Punkte für einen Treffer zu erhalten Verzögerung (Milli); brechen; } } Summe =0; for (int i=0; i<3; i++){ Sum =Sum + Rolls[i]; } if (Sum ==3) {//alle Rollovers beleuchtet, also blinken und dann ausschalten. für (int j =0; j <3; j ++) { für (int i =0; i <3; i ++) { digitalWrite (i + 40, LOW); } Verzögerung (Flash); für (int i=0; i<3; i++) {digitalWrite (i+40, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<3; i++){ digitalWrite (i+40, LOW); Rollen[i]=0; } Verzögerung (Flash); // Punktzahl mit 2 multiplizieren Punktzahl =Punktzahl * 2; Rolle =Rolle * 10; //zu Überspringen; } //*********** Pop Bumper ********** for (int i=0; i<4; i++){ if (analogRead(i)> 500){/ /pop aktivierte Pops[i]=1; Punktzahl =Punktzahl + Pop; // Pop-Stoßstangenlicht einschalten DigitalWrite (i + 50, HIGH); // verzögern, um nicht mehrere Punkte für einen Treffer zu erhalten // mySerial.print (analogRead (i)); //mySerial.print(" "); Verzögerung (Milli); brechen; } } Summe =0; for (int i=0; i<4; i++){ Sum =Sum + Pops[i]; } if (Sum ==4) {//alle Pop-Bumper leuchten, also blinken und dann ausschalten. für (int j =0; j <3; j ++) { für (int i =0; i <4; i ++) { digitalWrite (i + 50, LOW); } Verzögerung (Flash); für (int i=0; i<4; i++) {digitalWrite (i+50, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<4; i++) {digitalWrite (i+50, LOW); Pops[i]=0; } Verzögerung (Flash); // Zielwert mit 10 multiplizieren Pop =Pop * 2; //zu Überspringen; }Überspringen://Bestimme die Ballnummer, wenn (digitalRead(15) ==LOW){//Ball trifft den unteren Gassenschalter // Wenn noch nicht geschehen, erhöhe Ball if (Shot ==0) {//Set Lost =0 da nicht am Druckkissen Lost =0; Druck =analogRead(7) + 20; // OldScore so einstellen, dass der Ballwert auf dem LCD erneut gedruckt wird OldScore =-1; Kugel =Kugel + 1; wenn (Kugel ==6) {Kugel =1; Punktzahl =0; Ziel =1; Rolle =1; Pop =1; } Schuss =1; aufrechtzuerhalten. aufrechtzuerhalten. aufrechtzuerhalten =0; Druck =analogRead(7) + 15; // OldScore so einstellen, dass der Ballwert auf dem LCD erneut gedruckt wird OldScore =-1; Kugel =Kugel + 1; wenn (Kugel ==6) {Kugel =1; Punktzahl =0; Ziel =1; Rolle =1; Pop =1; } Schuss =1; aufrechtzuerhalten. aufrechtzuerhalten. Wenn (analogRead (7)> Druck) {// Ball auf dem Druckpolster Shot =0; Wenn (Verloren ==0) {//mySerial.print (analogRead (7)); //Punktzahl =Punktzahl + 100; Verloren =1; if (Ball ==5) {//Game Over // Flash-Rollover und dann ausschalten. für (int j =0; j <3; j ++) { für (int i =0; i <3; i ++) { digitalWrite (i + 40, LOW); } Verzögerung (Flash); für (int i=0; i<3; i++) {digitalWrite (i+40, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<3; i++){ digitalWrite (i+40, LOW); Rollen[i]=0; } // Pop-Bumper flashen und dann ausschalten für (int j =0; j <3; j ++) { for (int i =0; i <4; i ++) { digitalWrite (i + 50, LOW); } Verzögerung (Flash); für (int i=0; i<4; i++) {digitalWrite (i+50, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<4; i++) {digitalWrite (i+50, LOW); Pops[i]=0; } //Flash-Ziele und dann ausschalten. für (int j =0; j <3; j ++) { für (int i =0; i <8; i ++) { digitalWrite (i + 32, LOW); } Verzögerung (Flash); für (int i=0; i<8; i++) { DigitalWrite (i+32, HIGH); } Verzögerung (Flash); aufrechtzuerhalten. für (int i=0; i<8; i++){ digitalWrite (i+32, LOW); Ziele[i]=0; } mySerial.write (12); // Verzögerung löschen (5); // Erforderliche Verzögerung mySerial.print(Score); // Erste Zeile mySerial.write(13); // Formularfeed mySerial.print("Game Over!!!"); // Zweite Zeile}}}} // Auf LCD drucken if (Score !=OldScore) { mySerial.write (12); // Verzögerung löschen (5); // Erforderliche Verzögerung // mySerial.print (analogRead (7)); mySerial.print(Score); // Erste Zeile mySerial.write(13); // Formular-Feed mySerial.print("Ball ="); // Zweite Zeile mySerial.print(Ball); OldScore =Punktzahl; }}
Schaltpläne
Herstellungsprozess
- Raspberry Pi/Hologramm SMS-gesteuerter Netzschalter
- Raspberry Pi Roboter über Bluetooth gesteuert
- Gestengesteuerte interaktive Tischleuchte
- ULTRASCHALLLEVITATION-Maschine mit ARDUINO
- Alexa-gesteuerte LEDs über Raspberry Pi
- Joystick-gesteuertes RC-Auto
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Wireless Lichtschalter-Manipulator
- Sprachgesteuerter Roboter
- Arduino Apple Watch