


Sprachgesteuerter Roboter
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
 |
|
Über dieses Projekt
Roboter sind cool. Es ist cooler, einen Roboter zu haben, der sich bewegen kann und auf Ihre Sprachbefehle hört. Einen solchen sprach- oder sprachgesteuerten Roboter mit Arduino zu machen, wird immer cooler. Weil Arduinos billig und leicht zu optimieren sind.
Beginnen wir mit der Erstellung, Sie können sich auch das Video-Tutorial ansehen.
Schritt 1:Benötigte Teile
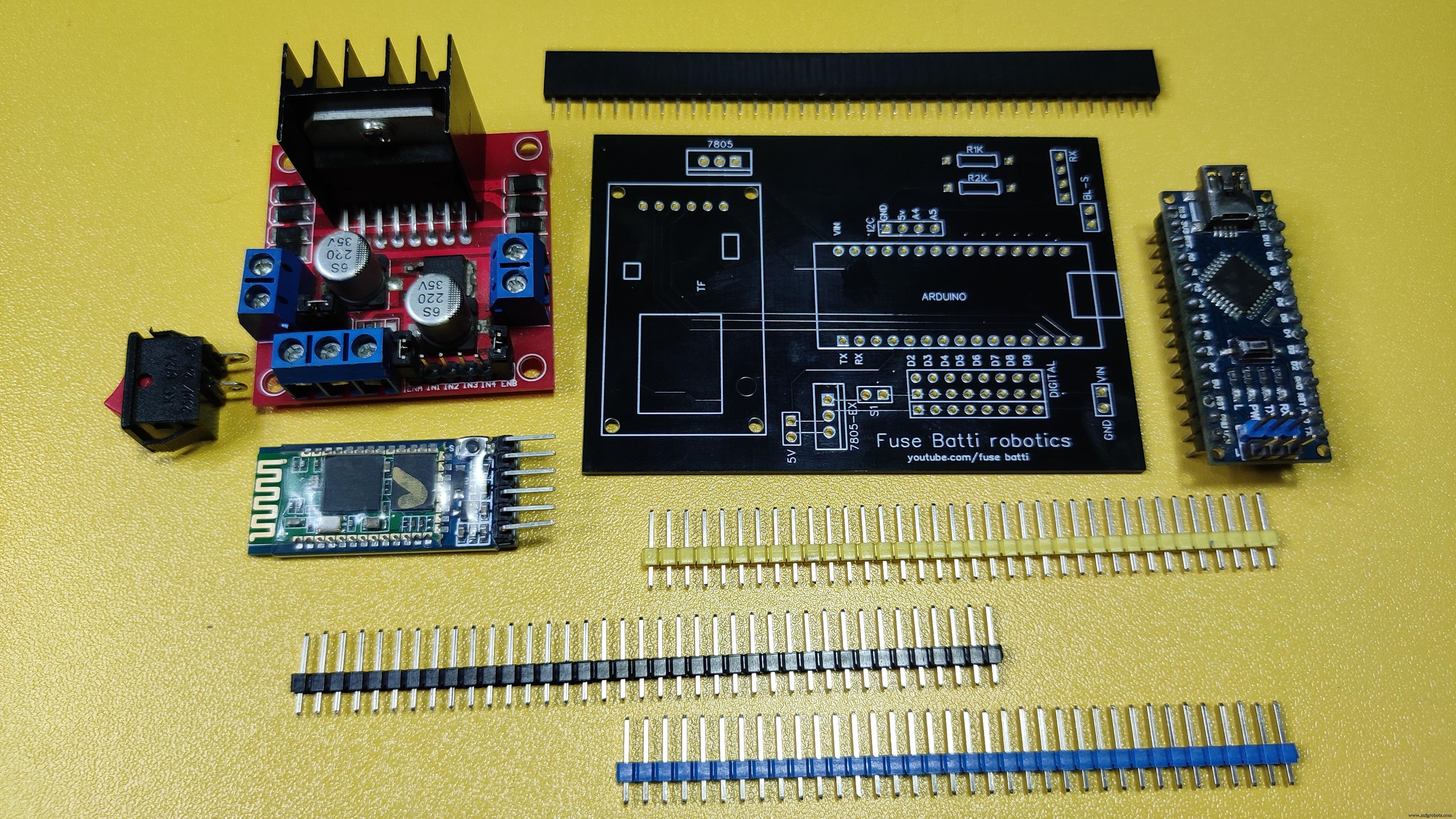
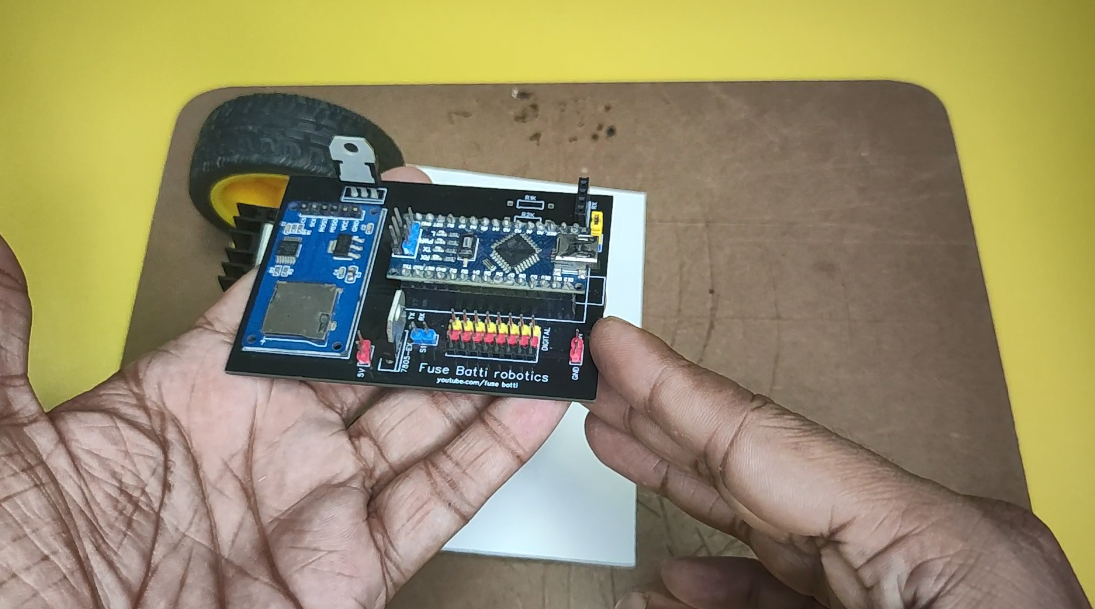
Der Roboter basiert auf PCB. Eine Leiterplatte, die ich für die Verwendung in verschiedenen Robotern entworfen habe. Mal sehen, welche anderen Komponenten ich verwendet habe -
Elektronik:
- Arduino Nano - 1x
- L298n-Motortreibermodul - 1x
- Hc05 Bluetooth-Modul - 1x
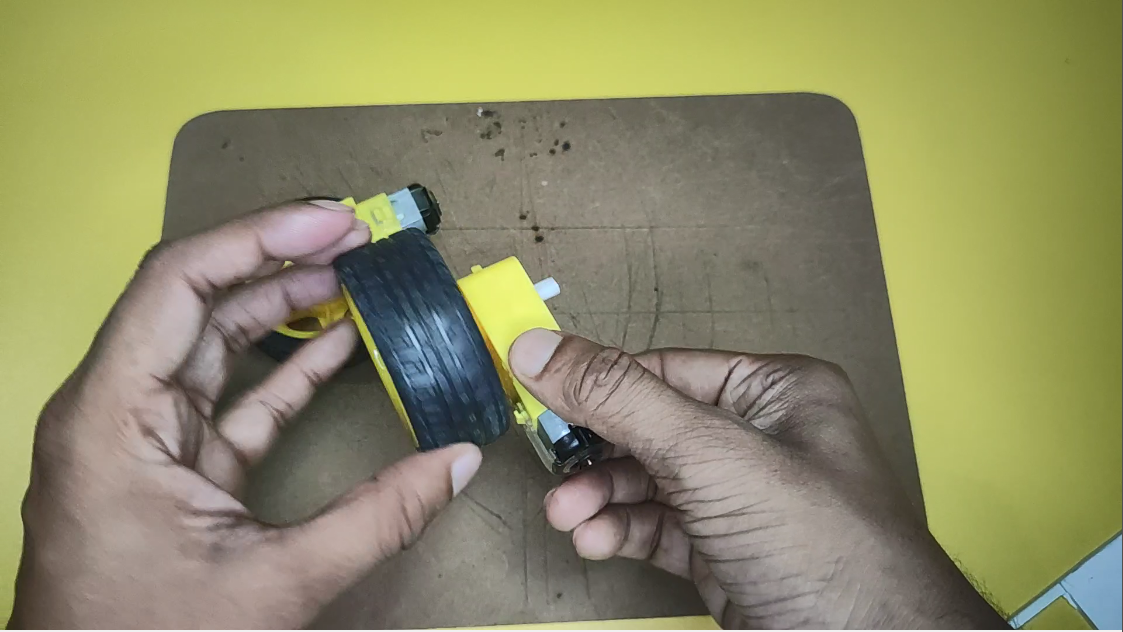
- DC-Motor und kompatibles Rad - 2x
- Multifunktionale Roboterplatine - 1x (Link)
- Einige männliche und weibliche Header
Um Körper zu machen:
- PVC-Platte
- Heißklebepistole
Software:
- Arduino.ide
- Eine von mir erstellte App
Das war's, jetzt können wir loslegen.
Schritt 2:Prinzip:Wie wird es funktionieren?
Es ist immer gut, ein klares Verständnis davon zu haben, was Sie tun werden, bevor Sie anfangen, Dinge durcheinander zu bringen. Vielleicht verwirrst du dich nicht, aber ich tue es.
Arduino ist also ein Minicomputer oder sagen wir ein Mikrocontroller. Es hat nicht genug Leistung oder Fähigkeit, um Spracherkennung durchzuführen (ab sofort). Aber zum Glück für mich hat meine Platine einen Anschluss zum Anschluss eines Bluetooth-Moduls. Das heißt, ich kann unser Arduino drahtlos mit anderen Geräten verbinden. Und das nutze ich aus. Also muss ich eine Android-App erstellen, die den "Speech to Text"-Vorgang mit der Google-API ausführen kann (erfordert Internet) und nach dem Empfang des Textes Arduino über Bluetooth befehligt.
Wenn ich also 'Vorwärts' sage, bekommt der Roboter 'F' und bewegt sich vorwärts. Das ist das Konzept. Jetzt machen wir es.
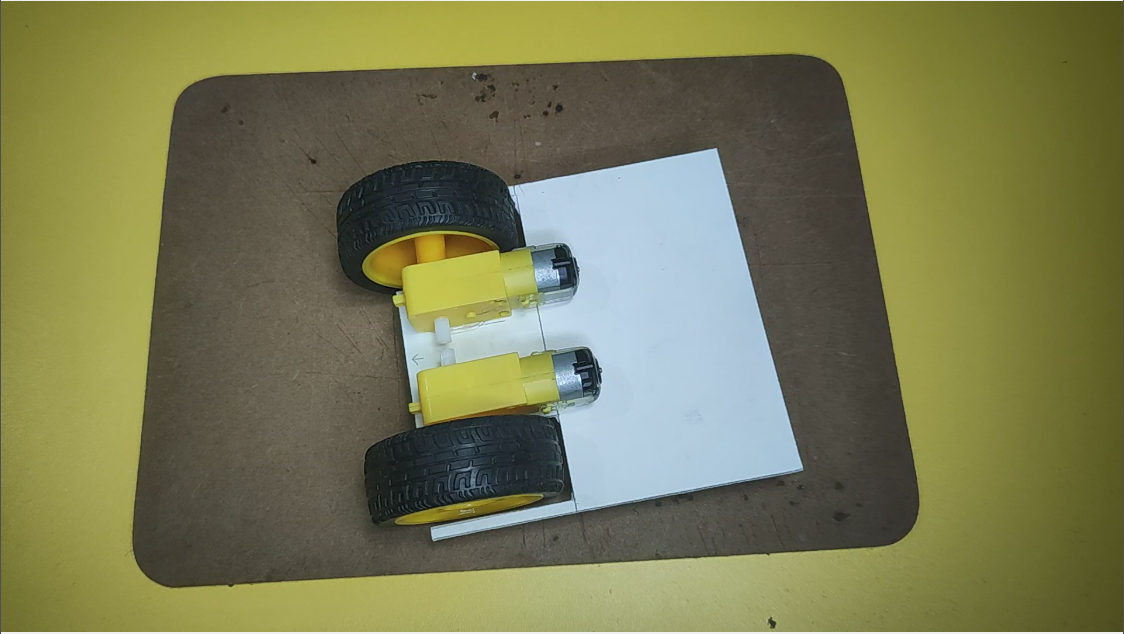
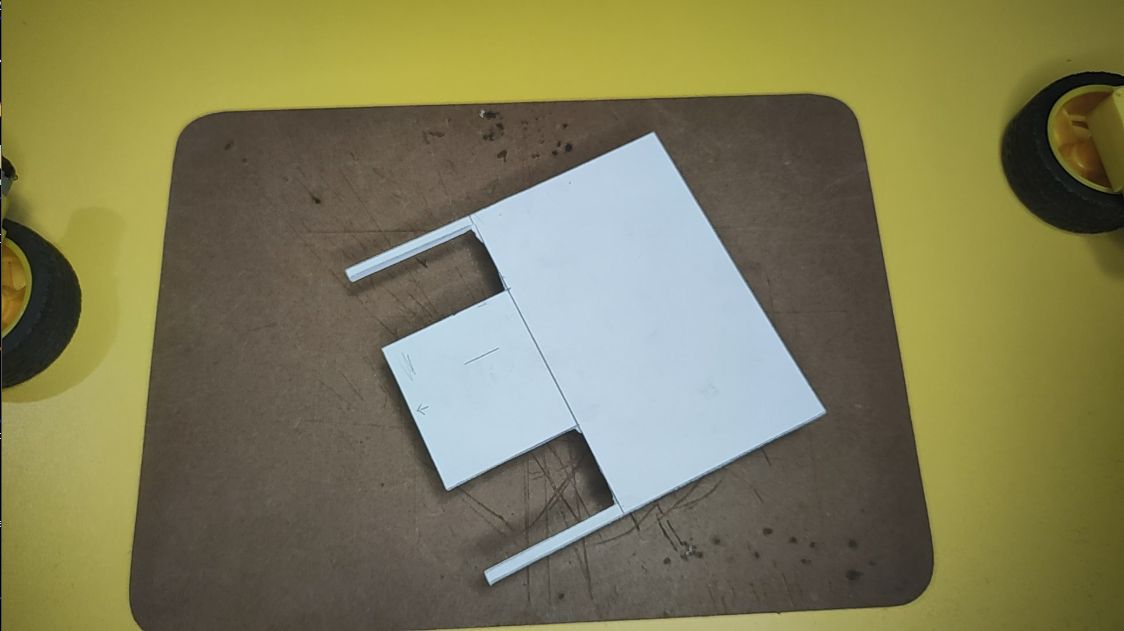
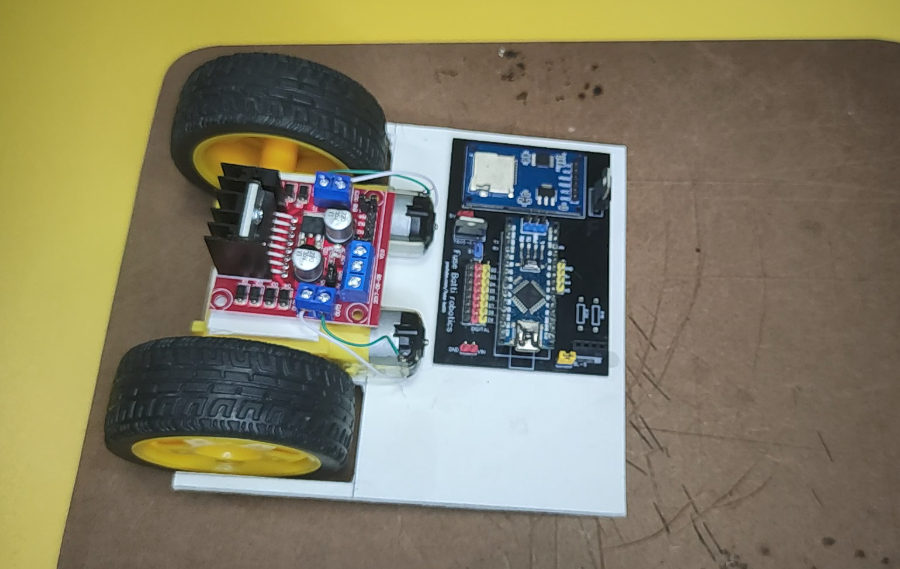
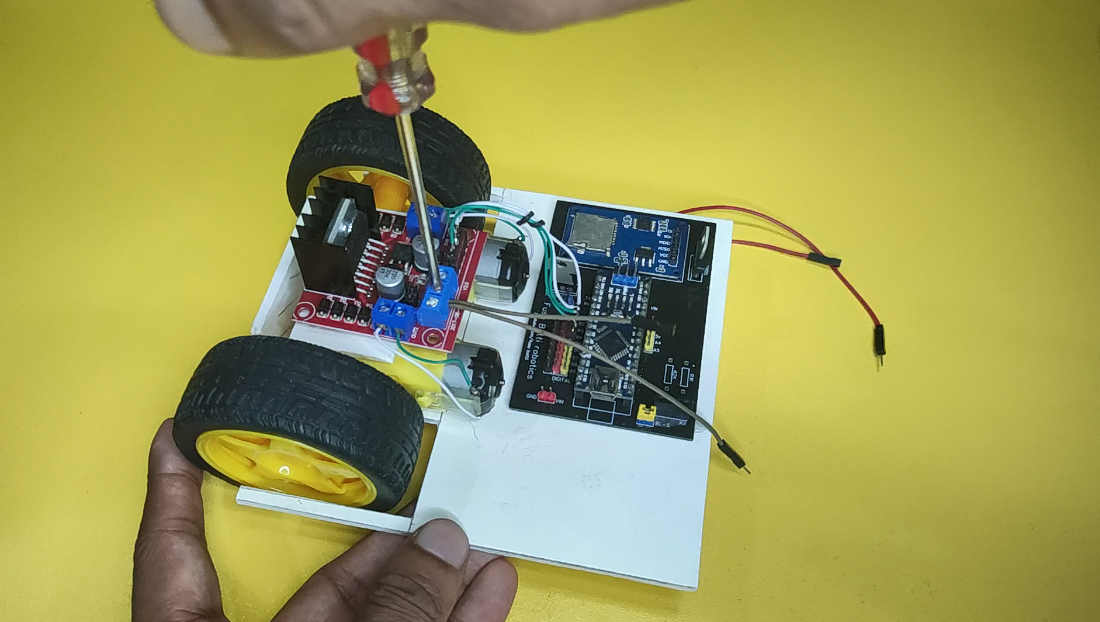
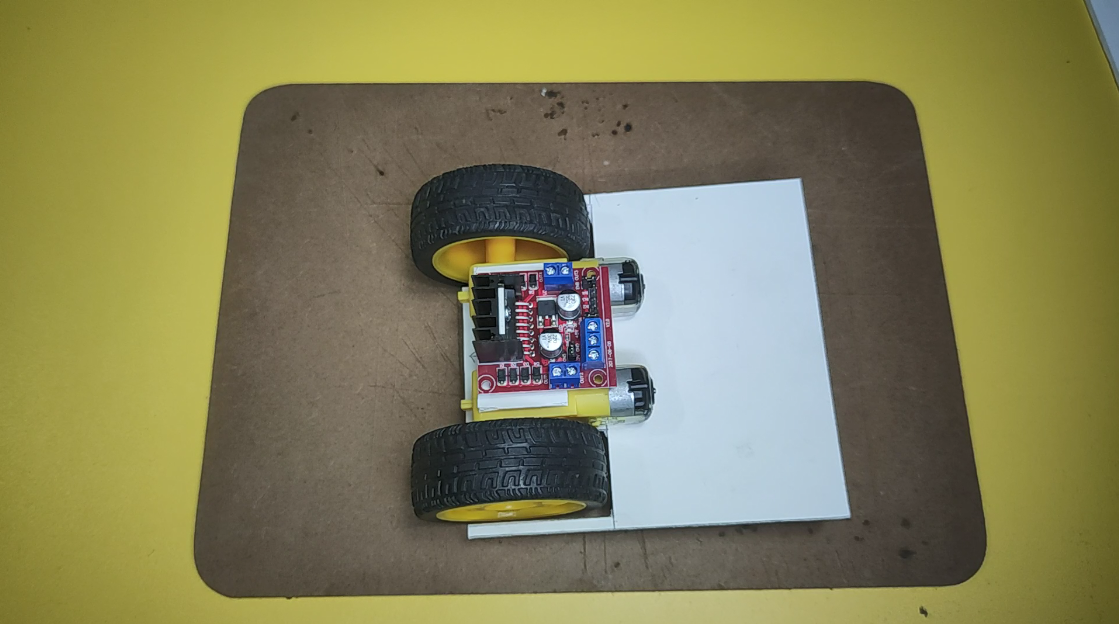
Schritt 3:Machen Sie den Körper
Ich habe das Chassis / den Körper dieses Roboters aus einer 13cm / 13,5cm PVC-Platte gemacht. Es ist einfacher mit einer Klinge/einem Messer zu schneiden und funktioniert auch hervorragend mit Klebstoffen.
Wie Sie im Video sehen können, habe ich Stücke geschnitten, um zwei Motoren und Räder sowohl innerhalb des Boardbereichs zu montieren. Und dann geklebt.
Wenn Sie Ihren machen, müssen Sie ihn nicht genau so aussehen lassen. Dein Bot deiner Wahl.
Schritt 4:Schaltung aufbauen oder PCB verwenden?


Auch hier kommen wir zu einem Punkt, an dem es ganz bei Ihnen liegt. Um eine Schaltung wie diese zu erstellen, ist jedoch eine Menge Verkabelung erforderlich, und wenn Sie sie mit einem Steckbrett herstellen, kann eine Fehlverbindung das gesamte Projekt behindern. Deshalb verwende ich gerne PCBs in meinen Projekten.
Ich habe diese Platine mit EasyEDA entworfen und bei PCBWay.com bestellt. PCBWay bietet Qualität zu einem günstigeren Preis. Sie können 10 mehrlagige Leiterplatten für nur 5 $ erhalten. Sie sponsern auch studentische Projekte, was mir gut tut.
Wie auch immer, ich ging zum Abschnitt Schnellbestellung, wo ich nur meine Platine hochladen musste, das System automatisch alle Parameter für mein Board erkannte und ich nur Farben ausgewählt habe. Schwarz ist mein Favorit und schau, wie glänzend und cool es geworden ist. Es ist besser, weil sie kein Geld nehmen, bis ihr Engineering-Team Ihre Leiterplatte inspiziert hat, gut genug!
Holen Sie sich die Platine von hier.
Wenn Sie diese Platine jedoch nicht bestellen oder verwenden können, können Sie dies auf einer Brotplatine oder einer Veroplatine tun. Ich habe die Fritzing-Schaltung für dich hochgeladen. Laden Sie es von unten herunter oder holen Sie es sich hier.
sprachgesteuerter-roboter-schema.fzz
Schritt 5:Elektronik anschließen
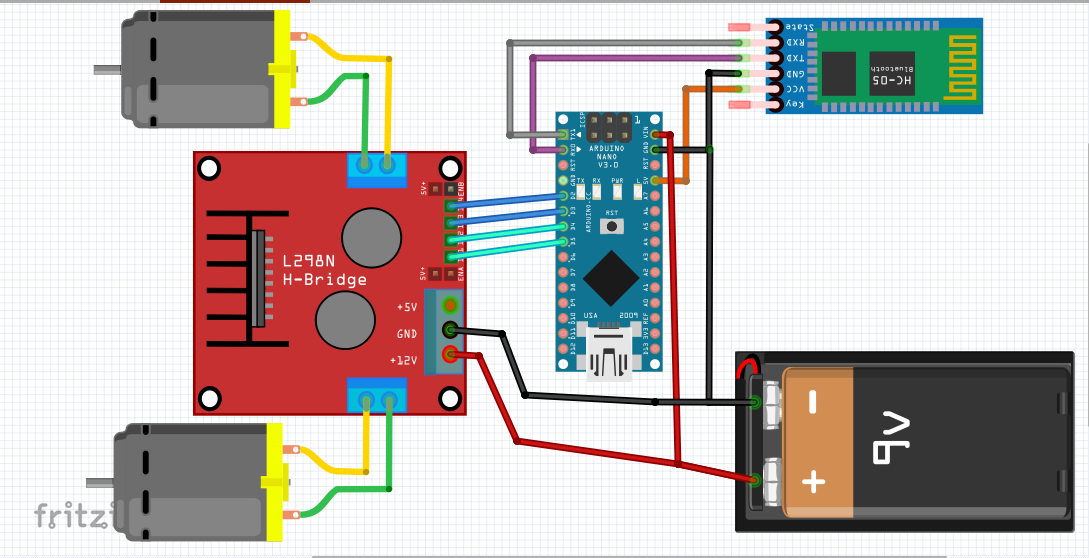
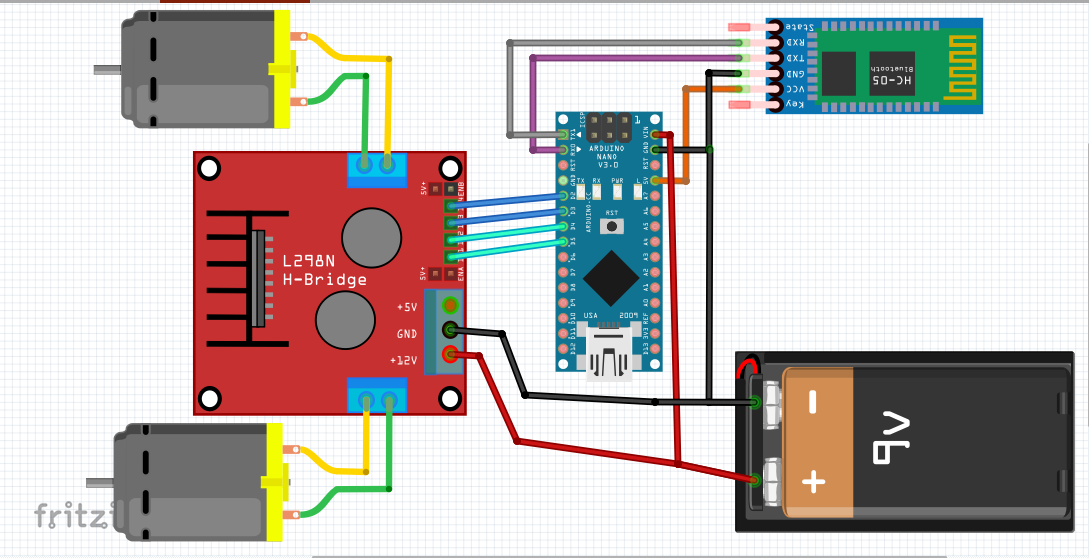
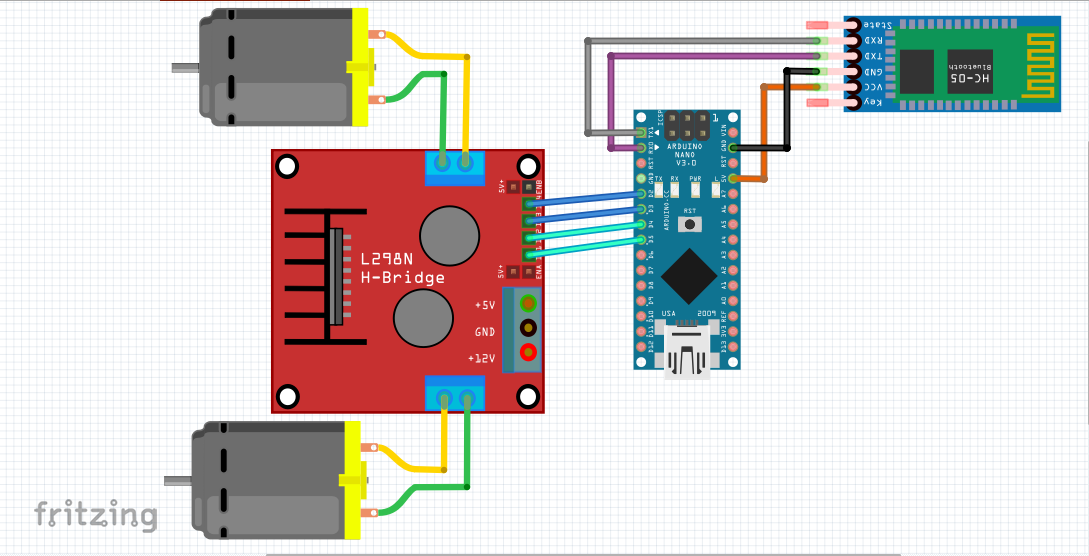
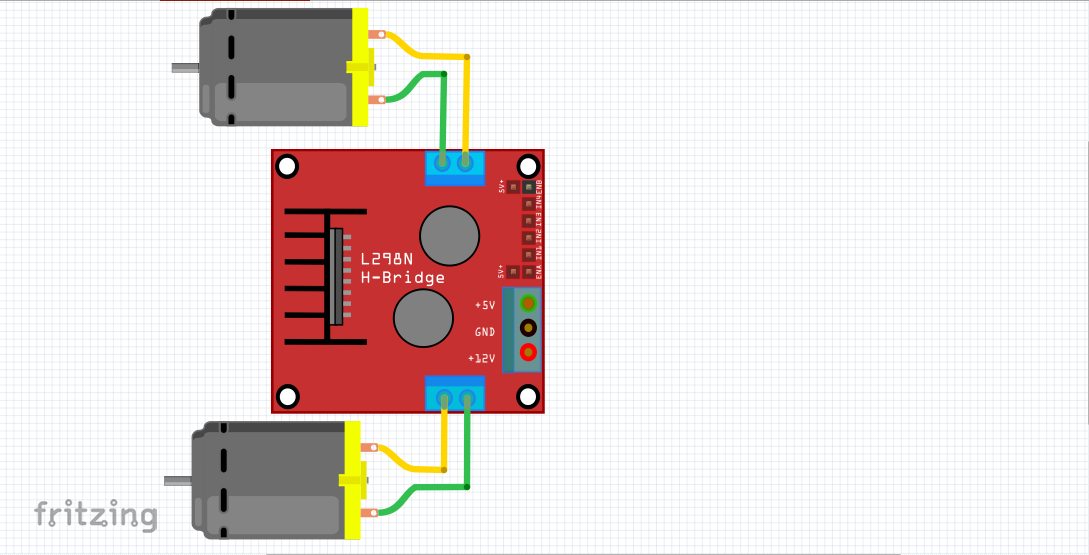
Die Verbindung ist direkt. Schließen Sie alle Dinge wie im Schaltplan gezeigt an. Ich beginne damit, Motoren mit Motortreibern zu verbinden -
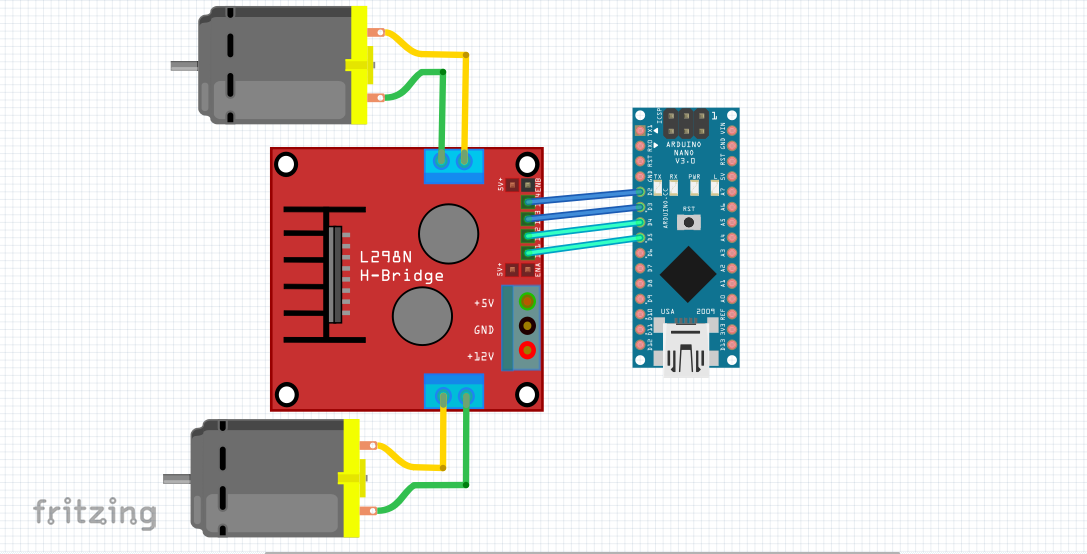
Motor zu Motortreiber
- Motor1-Kabel geht an ein Ende des Treibers
- Motor2 geht zum anderen Ende.
Um die Motoren zu steuern,
- Motor1-Pins des L298n-Motortreibers werden mit Arduino 2 und 3 Pins (digital) verbunden.
- Motor2 verbindet sich mit 4 und 5
Bluetooth-Modul,
- Tx an Arduino Rx
- Empfang an TX
- VCC zu 5V/VCC
- Gnd zu GND (Masse)
Batterie,
Ich habe eine 7,4 V-Batterie für die Motoren verwendet, die an den Motortreibereingang und die Arduino VIN und den Erdungsstift angeschlossen ist. Eine gemeinsame Masseverbindung ist erforderlich.
Dann habe ich die Batterie in allen beleuchteten Dingen angeschlossen. Das heißt, ich habe keinen Fehler gemacht.
Schritt 6:Arduino programmieren
Es ist ein einfaches Programm. Das Programm sucht nach Zeichen und wenn sie empfangen werden, geht es nach links oder rechts usw. Die Liste ist -
- 'F' - Weiterleiten
- 'B' - Rückwärts
- 'L' - Links
- 'R' - Richtig
Das Bluetooth-Modul ist am seriellen Port angeschlossen, sodass Arduino über Seriell mit 9600 bps kommuniziert.
I Setup-Abschnitt Ich habe die Pins und die Baudrate definiert -
void setup(){//initliere den Modus der PinspinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT);//setze die serielle Kommunikation rateSerial.begin(9600);} Der in mainloop Es prüfte auf Daten, die über seriell empfangen wurden-
// Überprüfen Sie, ob Arduino ein Signal empfängt oder nicht (Serial.available () ==0);val =Serial.read (); // liest das signalSerial.print(val); Und dann den Hauptcode, laden Sie ihn hier herunter. Ich habe den ganzen Code unten eingefügt -
/**** Arduino Speech/voice Controlled robot **** von Ashraf Minhaj* mailen Sie mir an ashraf_minhaj@yahoo.com* Tutorial- ashrafminhajfb.blogspot.com* ///Erklären Sie den Arduino Pinint lm1 =4; // 1. Motor Pins deklarierenint lm2 =5;int rm1 =2; // rechter Motor Pinsint rm2 =3; char val;void setup () { // den Modus der Pins initialisierenpinMode(lm1,OUTPUT);pinMode(lm2,OUTPUT);pinMode(rm1,OUTPUT);pinMode(rm2,OUTPUT ); // Setze die serielle KommunikationsrateSerial.begin (9600);}void loop () {//überprüfe, ob Arduino ein Signal empfängt oder nicht (Serial.available () ==0);val =Serial.read (); // liest das Signal //Serial.print(val);/*********Für Vorwärtsbewegung*********/if (val =='F'){//Serial .println("FORWARD");digitalWrite(lm1,HIGH);digitalWrite(rm1,HIGH);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}/*********Für Rückwärtsbewegung *********/sonst if(val =='B'){digitalWrite(lm2,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm1,LOW);} /********Rechts*********/else if(val =='R'){digitalWrite(lm1,HIGH);digitalWrite(rm2,HIGH);digitalWrite(lm2, LOW);digitalWrite(rm1,LOW);}/*********Left*********/else if(val =='L'){digitalWrite(lm2,HIGH); digitalWrite(rm1,HIGH);digitalWrite(lm1,LOW);digitalWrite(rm2,LOW);}/********STOP********/else{digitalWrite(lm1,LOW );digitalWrite(rm1,LOW);digitalWrite(lm2,LOW);digitalWrite(rm2,LOW);}delay(10);} Lade den Code hoch und erstelle dann die App.
Schritt 7:App für SPEECH to TEXT
Ich habe die App mit dem MIT-App-Erfinder erstellt. Sie können diese App nach Ihren Wünschen bearbeiten und anpassen. Holen Sie sich die Aia-Fie von hier.
Diese App verwendet Bluetooth-Konnektivität, um den Roboter zu steuern. Dazu musste ich das HC05 Bluetooth-Modul mit meinem Telefon koppeln. Das Standardpasswort ist entweder 1234 oder 0000.
Diese App verwendet die Google Speech-to-Text-API, um das, was ich sage, in Textform umzuwandeln. Dann wird der Satz in Kleinbuchstaben geschrieben, so ist es einfacher zu verarbeiten. Und stimmt mit if else-Anweisungen überein. Wenn der Benutzer "weiterleiten" sagt, senden Sie Arduono den Buchstaben "F" und es wird weitergeleitet. Das war's.
Erstellen und speichern Sie als APK-Datei oder verwenden Sie meine, um sie auf Ihrem Telefon zu installieren.
sprachgesteuerter-roboter-schema.fzz
Schritt 8:Schalten Sie den Bot ein, starten Sie die App und gehen Sie!
Schließen Sie jetzt einfach den Akku an und verwenden Sie die Android-App, um mit Ihrem brandneuen Roboter herumzuspielen!
Vielen Dank fürs Lesen. Schauen Sie sich mein neuestes Projekt an -
Code
- Code-Snippet Nr. 1
- Code-Snippet #3
Code-Snippet Nr. 1Nur-Text
void setup () { // Modus der Pins initialisieren pinMode (lm1, OUTPUT); pinMode (lm2, AUSGANG); pinMode (rm1, AUSGANG); pinMode (rm2, AUSGANG); // Setze die serielle Kommunikationsrate Serial.begin (9600);} Code-Snippet #3Kurztext
/**** Arduino Speech/voice Controlled robot *** * von Ashraf Minhaj * mailen Sie mir an ashraf_minhaj@yahoo.com * Tutorial- ashrafminhajfb.blogspot.com *///Deklarieren Sie den Arduino Pinint lm1 =4; // 1. Motor Pins deklarierenint lm2 =5;int rm1 =2; // rechter Motor Pinsint rm2 =3; char val;void setup () { // Modus der Pins initialisieren pinMode (lm1, OUTPUT); pinMode (lm2, AUSGANG); pinMode (rm1, AUSGANG); pinMode (rm2, AUSGANG); // Stellen Sie die serielle Kommunikationsrate ein Serial.begin (9600);}void loop () { // Überprüfen Sie, ob Arduino ein Signal empfängt oder nicht, während (Serial.available () ==0); val =Serial.read(); // liest das Signal // Serial.print (val); /********Für Vorwärtsbewegung*********/ if (val =='F') {//Serial.println("FORWARD"); digitalWrite (lm1, HOCH); digitalWrite (rm1, HOCH); digitalWrite (lm2, LOW); digitalWrite (rm2, LOW); } /*********Für Rückwärtsbewegung*********/ else if (val =='B') { digitalWrite (lm2, HIGH); digitalWrite (rm2, HOCH); digitalWrite (lm1, LOW); digitalWrite (rm1, LOW); } /********Rechts*********/ else if (val =='R') { digitalWrite (lm1, HIGH); digitalWrite (rm2, HOCH); digitalWrite (lm2, LOW); digitalWrite (rm1, LOW); } /********Links*********/ else if(val =='L') { digitalWrite(lm2,HIGH); digitalWrite (rm1, HOCH); digitalWrite (lm1, LOW); digitalWrite (rm2, LOW); } /************STOP*********/ else { digitalWrite (lm1, LOW); digitalWrite (rm1, LOW); digitalWrite (lm2, LOW); digitalWrite (rm2, LOW); } Verzögerung(10); } Github
https://github.com/ashraf-minhaj/sprachgesteuerter-roboterhttps://github.com/ashraf-minhaj/sprachgesteuerter-roboterSchaltpläne
sprachgesteuerter-roboter-schematic_hUoWKpapKe.fzzHerstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Bauen Sie Ihren internetgesteuerten Videostreaming-Roboter mit Arduino und Raspberry Pi
- Windows 10 IoT Core:Sprachgesteuerter Roboter
- WLAN-gesteuerter Roboter mit Raspberry Pi
- Joystick-gesteuertes RC-Auto
- Linienfolger-Roboter
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Über Ethernet gesteuerter Roboterarm
- MobBob:DIY-Arduino-Roboter, der von einem Android-Smartphone gesteuert wird
- Arduino-gesteuerter Klavierroboter:PiBot