


Verilog-Taktgenerator
Uhren sind grundlegend für den Aufbau digitaler Schaltungen, da sie es ermöglichen, dass verschiedene Blöcke miteinander synchronisiert werden.
Eigenschaften einer Uhr
Die Schlüsseleigenschaften einer Digitaluhr sind ihre Frequenz die die Taktperiode bestimmt , seine Einschaltdauer und die Taktphase im Verhältnis zu anderen Uhren.
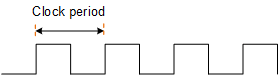
Zeitraum
Die Frequenz gibt an, wie viele Zyklen in einem bestimmten Zeitraum zu finden sind. Und daher ist die Taktperiode die Zeit, die benötigt wird, um einen Zyklus abzuschließen.
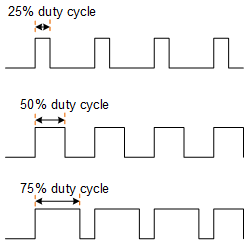
Arbeitszyklus der Uhr
Die Zeitspanne, in der die Uhr im Vergleich zu ihrer Zeitspanne hoch ist, definiert das Tastverhältnis.
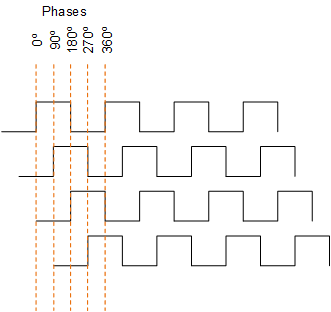
Uhrphase
Wenn ein Zyklus einer Uhr als vollständiger Kreis mit 360 Grad betrachtet werden kann, kann eine andere Uhr relativ an einer anderen Stelle im Kreis platziert werden, die eine andere Phase einnimmt. Zum Beispiel kann gesagt werden, dass eine andere Uhr der gleichen Zeitperiode, die um 1/4 ihrer Periode nach rechts verschoben ist, eine Phasendifferenz von 90 Grad aufweist.
Verilog-Taktgenerator
Simulationen müssen auf einer bestimmten Zeitskala funktionieren, die eine begrenzte Genauigkeit hat, wie in der Zeitskalenrichtlinie festgelegt. Daher ist es wichtig, dass die Genauigkeit der Zeitskala gut genug ist, um eine Taktperiode darzustellen. Wenn beispielsweise die Taktfrequenz auf 640000 kHz eingestellt ist, beträgt seine Taktperiode 1,5625 ns, wofür eine Zeitskalengenauigkeit von 1 ps nicht ausreicht, da ein zusätzlicher Punkt dargestellt werden muss. Daher rundet die Simulation die letzte Ziffer, um in die 3-Punkt-Zeitskalengenauigkeit zu passen. Dadurch wird die Taktperiode auf 1,563 erhöht, was tatsächlich 639795 kHz entspricht!
Das folgende Verilog-Taktgeneratormodul hat drei Parameter, um die drei verschiedenen Eigenschaften wie oben beschrieben zu optimieren. Das Modul verfügt über einen Freigabeeingang, mit dem die Uhr nach Bedarf gesperrt und freigegeben werden kann. Wenn mehrere Takte von einem gemeinsamen Aktivierungssignal gesteuert werden, können sie relativ einfach phasengesteuert werden.
`timescale 1ns/1ps
module clock_gen ( input enable,
output reg clk);
parameter FREQ = 100000; // in kHZ
parameter PHASE = 0; // in degrees
parameter DUTY = 50; // in percentage
real clk_pd = 1.0/(FREQ * 1e3) * 1e9; // convert to ns
real clk_on = DUTY/100.0 * clk_pd;
real clk_off = (100.0 - DUTY)/100.0 * clk_pd;
real quarter = clk_pd/4;
real start_dly = quarter * PHASE/90;
reg start_clk;
initial begin
$display("FREQ = %0d kHz", FREQ);
$display("PHASE = %0d deg", PHASE);
$display("DUTY = %0d %%", DUTY);
$display("PERIOD = %0.3f ns", clk_pd);
$display("CLK_ON = %0.3f ns", clk_on);
$display("CLK_OFF = %0.3f ns", clk_off);
$display("QUARTER = %0.3f ns", quarter);
$display("START_DLY = %0.3f ns", start_dly);
end
// Initialize variables to zero
initial begin
clk <= 0;
start_clk <= 0;
end
// When clock is enabled, delay driving the clock to one in order
// to achieve the phase effect. start_dly is configured to the
// correct delay for the configured phase. When enable is 0,
// allow enough time to complete the current clock period
always @ (posedge enable or negedge enable) begin
if (enable) begin
#(start_dly) start_clk = 1;
end else begin
#(start_dly) start_clk = 0;
end
end
// Achieve duty cycle by a skewed clock on/off time and let this
// run as long as the clocks are turned on.
always @(posedge start_clk) begin
if (start_clk) begin
clk = 1;
while (start_clk) begin
#(clk_on) clk = 0;
#(clk_off) clk = 1;
end
clk = 0;
end
end
endmodule
Testbench mit unterschiedlichen Taktfrequenzen
module tb;
wire clk1;
wire clk2;
wire clk3;
wire clk4;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.FREQ(200000)) u1(enable, clk2);
clock_gen #(.FREQ(400000)) u2(enable, clk3);
clock_gen #(.FREQ(800000)) u3(enable, clk4);
initial begin
enable <= 0;
for (int i = 0; i < 10; i= i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
#50;
end
#50 $finish;
end
endmodule
 Simulationsprotokoll
Simulationsprotokoll xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 200000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 5.000 ns CLK_ON = 2.500 ns CLK_OFF = 2.500 ns QUARTER = 1.250 ns START_DLY = 0.000 ns FREQ = 400000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 2.500 ns CLK_ON = 1.250 ns CLK_OFF = 1.250 ns QUARTER = 0.625 ns START_DLY = 0.000 ns FREQ = 800000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 1.250 ns CLK_ON = 0.625 ns CLK_OFF = 0.625 ns QUARTER = 0.312 ns START_DLY = 0.000 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
Testbench mit unterschiedlichen Taktphasen
module tb;
wire clk1;
wire clk2;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.FREQ(50000), .PHASE(90)) u1(enable, clk2);
initial begin
enable <= 0;
for (int i = 0; i < 10; i=i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
end
#50 $finish;
end
endmodule
 Simulationsprotokoll
Simulationsprotokoll xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 90 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 2.500 ns FREQ = 100000 kHz PHASE = 180 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 5.000 ns FREQ = 100000 kHz PHASE = 270 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 7.500 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
Testbench mit verschiedenen Tastverhältnissen
module tb;
wire clk1;
wire clk2;
wire clk3;
wire clk4;
reg enable;
reg [7:0] dly;
clock_gen u0(enable, clk1);
clock_gen #(.DUTY(25)) u1(enable, clk2);
clock_gen #(.DUTY(75)) u2(enable, clk3);
clock_gen #(.DUTY(90)) u3(enable, clk4);
initial begin
enable <= 0;
for (int i = 0; i < 10; i= i+1) begin
dly = $random;
#(dly) enable <= ~enable;
$display("i=%0d dly=%0d", i, dly);
#50;
end
#50 $finish;
end
endmodule
 Simulationsprotokoll
Simulationsprotokoll xcelium> run FREQ = 100000 kHz PHASE = 0 deg DUTY = 50 % PERIOD = 10.000 ns CLK_ON = 5.000 ns CLK_OFF = 5.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 25 % PERIOD = 10.000 ns CLK_ON = 2.500 ns CLK_OFF = 7.500 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 75 % PERIOD = 10.000 ns CLK_ON = 7.500 ns CLK_OFF = 2.500 ns QUARTER = 2.500 ns START_DLY = 0.000 ns FREQ = 100000 kHz PHASE = 0 deg DUTY = 90 % PERIOD = 10.000 ns CLK_ON = 9.000 ns CLK_OFF = 1.000 ns QUARTER = 2.500 ns START_DLY = 0.000 ns i=0 dly=36 i=1 dly=129 i=2 dly=9 i=3 dly=99 i=4 dly=13 i=5 dly=141 i=6 dly=101 i=7 dly=18 i=8 dly=1 i=9 dly=13 Simulation complete via $finish(1) at time 1110 NS + 0
Toggle enable to start/stop clocks
Die Wellenform unten zeigt, dass Takte gestoppt werden, wenn enable niedrig ist, und Takte gestartet werden, wenn enable hoch eingestellt ist.

Verilog