


Wie man einen Roboterförderer programmiert, ohne verrückt zu werden
Das Programmieren eines Förderroboters ist kniffliger, als sich viele vorstellen. Eine gute Simulation ist der Schlüssel zum Erfolg, aber wie macht man das, ohne verrückt zu werden?
Förderbänder sind eine einfache Möglichkeit, Produkte zu Ihrem Roboter zu transportieren, richtig?
Nicht wirklich. Wir denken oft an Förderer als einfache Lösung, aber tatsächlich sind sie eine der komplizierteren Methoden der Werkstückzuführung. Sie erfordern, dass der Roboter Objekte erkennt und verfolgt, die sich auf dem Förderband bewegen. Sie müssen über das Roboterprogramm gesteuert werden. Sie leiden im Laufe ihrer Lebensdauer auch unter verschiedenen mechanischen Problemen, wie z. B. schlechter Spurführung, Riemenverschleiß und Rutschen. All dies bedeutet, dass Förderbänder Sie ein wenig verrückt machen können.
Anstatt einfach zu sein, können sie schwierig zu verwenden sein.
Wir können die mechanischen Probleme Ihrer Förderer nicht lösen – dafür brauchen Sie einen guten Wartungsplan wie den in dieser praktischen Checkliste von Cisco-Eagle. Wir können es jedoch helfen Ihnen, das Förderband einfach zu simulieren, damit Sie es testen und in Ihre Roboterprogrammierung integrieren können.
So programmieren Sie Ihren Roboterförderer, ohne verrückt zu werden.
Die 5 kniffligen beweglichen Teile eines Roboterförderers
Zunächst ist es wichtig zu verstehen, warum die Programmierung eines Förderers eine Herausforderung darstellt.
Es gibt 5 „bewegliche Teile“, die es schwierig machen, die Roboterprogrammierung mit Förderbändern zu integrieren.
1. Steuerung des Förderers selbst
Es mag so aussehen, als wäre die Förderbandsteuerung nur ein „Ein/Aus“-Deal, aber es ist normalerweise etwas komplexer. Förderer verfügen je nach Modell über eine Vielzahl von Steuerungsmöglichkeiten. Einige haben eine feste Geschwindigkeit, während andere mit variablen Geschwindigkeiten gesteuert werden können. Einige haben einen Rückwärtsmodus, aktives Bremsen oder schnelles Schalten. Dann gibt es verschiedene Steuerungsmethoden, die drei häufigsten sind Impulssteuerung, Geschwindigkeitssteuerung und verteilte Steuerung.

Möglicherweise müssen Sie das Förderband im Roboterprogramm selbst steuern. Ist dies nicht der Fall, müssen Sie möglicherweise über ein Netzwerk mit dem Förderer verbunden werden. Beide Optionen erhöhen die Programmierkomplexität.
2. Verfolgung und Erkennung von Objekten
Um Gegenstände von einem laufenden Förderband aufzunehmen, muss der Roboter diese zuverlässig lokalisieren können. Das bedeutet, dass Sie eine Art Sensor benötigen, um zu erkennen, wenn ein Objekt vor dem Roboter ankommt. Darüber hinaus benötigt der Roboter möglicherweise eine Möglichkeit, die Objekte zu verfolgen, während sich das Förderband bewegt.
Die gebräuchlichsten Sensoren dafür sind Vision-Sensoren (z. B. 2D- oder 3D-Kameras) und Teileerkennungssensoren (z. B. Lichtschranken, magnetische Sensoren, induktive Sensoren usw.). Einige sind einfacher zu integrieren als andere, aber alle fügen Ihrem Programm zusätzliche Komplexität hinzu.
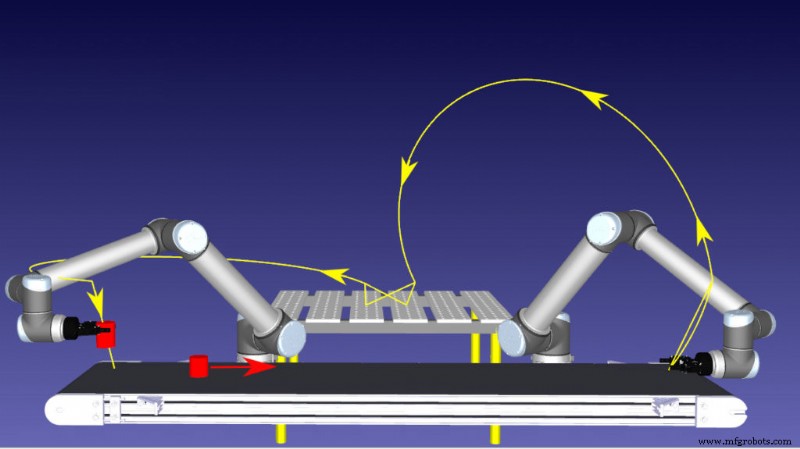
3. Umgang mit sich bewegenden Objekten
Ein sich bewegendes Ziel ist immer schwerer zu handhaben als ein statisches. Dies führt zu Komplexität beim Greifen von einem Förderband. Der Roboter muss in der Lage sein, sich in Position zu bewegen, das Objekt fest zu greifen und sich wegzubewegen, während ständig neue Objekte eintreffen.
Die Geschwindigkeit des Förderers muss genau auf die Geschwindigkeit des Roboters abgestimmt sein, da sonst Objekte übersehen werden können. Wenn Sie die berühmte „Schokoladenszene“ aus der Komödie „I Love Lucy“ aus den 1950er Jahren gesehen haben, wissen Sie, was ich meine (und hier ist sie, falls Sie sie noch nicht gesehen haben).
4. Wahl des Endeffektors
Der Roboterarm ist nicht der einzige Teil des Systems, der mit der Geschwindigkeit Schritt halten muss. Der Endeffektor kann einen erheblichen Einfluss auf die Taktzeit und damit auf die Geschwindigkeit des Förderers haben. Einige Arten von Endeffektoren sind schneller als andere.
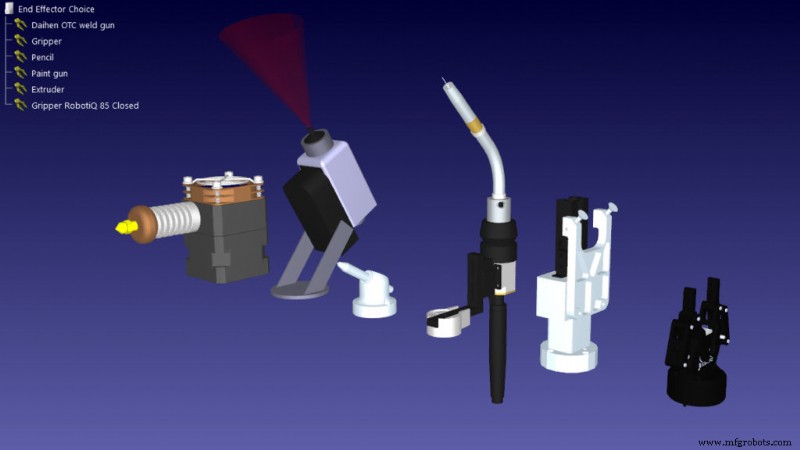
Das bedeutet, dass wir jetzt 3 unabhängige Geschwindigkeiten gleichzeitig steuern und koordinieren müssen:die Förderbandgeschwindigkeit, die Roboterarmgeschwindigkeit und die Greifgeschwindigkeit des Endeffektors.
5. Verwendung von Vorrichtungen
Das letzte bewegliche Teil ist eigentlich überhaupt kein bewegliches Teil. Vorrichtungen sind statische mechanische Teile, die am Förderer befestigt sind, um die Objekte in Position zu bringen. Sie sind eine zuverlässige Möglichkeit, die Objekte auf dem Förderband ohne den Einsatz von Sensoren zu ordnen.
Beispielsweise können Sie eine Vorrichtung als Alternative zur Verwendung eines Vision-Sensors verwenden. Mit speziell geformtem Blech können Sie Objekte in eine statische Warteschlange leiten, sodass der Roboter sie ohne zusätzliche Sensoren aufnehmen kann. Sie vereinfachen die Programmierung, erhöhen aber die Komplexität des mechanischen Designs.
So simulieren Sie ein Förderband mit RoboDK
Sie können die fünf oben genannten Herausforderungen überwinden, indem Sie Ihr Robotersystem simulieren und gründlich testen, bevor Sie das physische System verwenden. Dies ist bei Robotersimulatoren nicht immer einfach, von denen viele keine einfache Möglichkeit zum Hinzufügen von Förderbändern haben.
Zum Glück sind Förderer in RoboDK ziemlich einfach. Es gibt sogar zwei Möglichkeiten, sie hinzuzufügen, je nachdem, wie viel Kontrolle Sie benötigen.
Die zwei Förderertypen in RoboDK sind:
Option 1:Python-Programmierung
Die flexibelste Methode zum Erstellen eines Förderers in RoboDK ist die Programmierung in Python. Sie können dies in Aktion im Beispielvideo Conveyor Simulation with RoboDK sehen.
Vorteile der Python-Programmierung sind:
- Es ist sehr flexibel. Die Bewegung des Förderers ist nur durch Ihre Programmierfähigkeiten begrenzt. Sie können das simulierte Förderband so programmieren, dass es den Eigenschaften Ihres echten Bandes entspricht.
- Es ist vollständig anpassbar. Sie können den Förderer so programmieren, dass er sich in beliebiger Weise bewegt. Sie haben die vollständige Kontrolle über seine Bewegungen und wie er mit Objekten umgeht.
- Es ermöglicht komplexere Förderer. Wenn Ihr Förderer über erweiterte Steuerungsmodi verfügt, können diese in den Python-Code aufgenommen werden. Wenn Sie beispielsweise eine Vorrichtung zum Bewegen von Objekten an der Seite des Bandes platziert haben, kann dies in den Code programmiert werden.
Nachteile der Python-Programmierung sind:
- Es erfordert Programmierkenntnisse . Du musst in Python programmieren können. Dies ist eine der am einfachsten zu erlernenden Sprachen, erfordert aber dennoch eine Lernkurve, wenn Sie bisher nur die grafische Benutzeroberfläche von RoboDK verwendet haben.
- Es dauert etwas länger . Im Vergleich zur linearen Mechanismusoption nimmt die Python-Programmierung Zeit in Anspruch. Außerdem dauert die Programmierung umso länger, je komplexer Ihr Förderer ist.
Option 2:Linearmechanismus
Die andere Möglichkeit besteht darin, mit dem Assistenten „Modellmechanismus“ einen linearen Mechanismus zu erstellen. Dadurch können Sie einen einfachen Förderer mit einer einzigen Linearachse erstellen.
Vorteile des Linearmechanismus sind:
- Es ist schnell. Sie können in wenigen Minuten einen linearen Mechanismus erstellen und das Förderband sehr schnell zu Ihrer Robotersimulation hinzufügen.
- Es verwendet den grafischen Assistenten. Sie können den Mechanismus mit dem Assistenten erstellen, indem Sie nur Referenzrahmen und Ziele verwenden.
- Es erfordert wenig bis gar keine Programmierung. Sie müssen keine Python-Programmierung durchführen, um das Förderband zu erstellen. Beachten Sie jedoch, dass Sie wahrscheinlich etwas programmieren müssen, um Objekte auf dem Förderband zu erkennen.
Nachteile des Linearmechanismus sind:
- Es ist begrenzt. Die einfache Art des Mechanismus bedeutet, dass Sie nur einen einachsigen Förderer modellieren können.
- Es ist unflexibel. Diese Option macht es schwierig, die erweiterten Steuerungsoptionen Ihres Förderers zu modellieren. Es ist auch schwer zu erkennen, wenn Gegenstände vom Förderband fallen.
Erste Schritte
Welche Option Sie wählen, hängt weitgehend davon ab, wie viel Sie Python-Programmierung vermeiden möchten. Sofern Sie keinen guten Grund haben, sich für den linearen Mechanismus zu entscheiden, empfehlen wir normalerweise die Wahl der Python-Option. Es ist viel flexibler und – ich denke (obwohl ich Programmierer bin) – einfacher zu verstehen und zu implementieren.
Welche Option Sie auch wählen, Sie müssen die Förderersimulation nicht von Grund auf neu erstellen.
Wir haben beide Optionen zum Download in unserer Roboterbibliothek verfügbar. Wählen Sie einfach „Object“ aus dem „Type“-Menü und Sie sehen die beiden Optionen:„Model Python“ für die Python-Option; und „Modellmechanismus“ für die lineare Mechanismusoption.
Wenn Sie nicht weiterkommen, können Sie jederzeit einen Kommentar im RoboDK-Forum posten und wir werden unser Bestes tun, um Ihnen zu helfen.
Industrieroboter
- Wie Sprühroboter die Konsistenz verbessern
- Wie Lackierroboter Nacharbeiten reduzieren
- Wie erreicht ein Roboter volle Autonomie?
- Verrückte Förderer
- Whitepaper:So finden Sie Ihr Roboterpotenzial
- Ultimate Guide:So wählen Sie einen richtigen SCARA-Roboter
- Robotermaschinenpflege:Was es ist und wie es funktioniert
- So reduzieren Sie die Schulungszeit für das Roboterschweißen
- Der richtige Weg, um einen Roboterförderer zu simulieren
- Auswahl der Förderbandstruktur