


Glättung der Leistung des EV-Antriebsstrangs mit einem feldorientierten Regelalgorithmus
Hochleistungsmotoren benötigen einen Steuermechanismus, der für mehr Laufruhe, Zuverlässigkeit und Effizienz sorgt. Eines der geeignetsten Beispiele für eine solche Anwendung ist der Motor im Antriebsstrang von Elektrofahrzeugen (EV), der von einem auf Feldorientierten Steuerung (FOC) basierenden System gesteuert werden kann.
Damit ein EV-Antriebsstrang reibungslos fährt, sollte das Steuerschema so sein, dass der Motor über einen weiten Drehzahlbereich arbeiten und bei niedrigsten Drehzahlen ein maximales Drehmoment erzeugen kann. Technisch gesehen muss die Motorsteuerung auf Drehmoment und Magnetfluss basieren, damit wir das Drehmoment durch Steuern des Stroms genau steuern können.
Das Grundprinzip der Drehung des Rotors eines Motors besteht darin, ein Magnetfeld im Stator zu erzeugen. Dies geschieht durch Bestromen der Statorspulen mit Wechselstrom. Das Geheimnis des reibungslosen Betriebs eines Motors liegt in der Kenntnis der Position des Rotors, dh des Winkels zwischen der Flussachse des Rotors und der magnetischen Achse des Stators. Sobald dieser Wert bekannt ist, wird der Statorstrom auf die Drehmomentachse des Rotors ausgerichtet. Um einen Spitzenwirkungsgrad zu erreichen, muss der Magnetfluss des Stators senkrecht zum Magnetfluss des Rotors sein.
FOC-basierte Motorsteuerung
Auf dem Papier sieht ein typisches feldorientiertes Steuerungssystem (FOC) aus, wie in Abbildung 1 gezeigt.
Klick für Bild in voller Größe
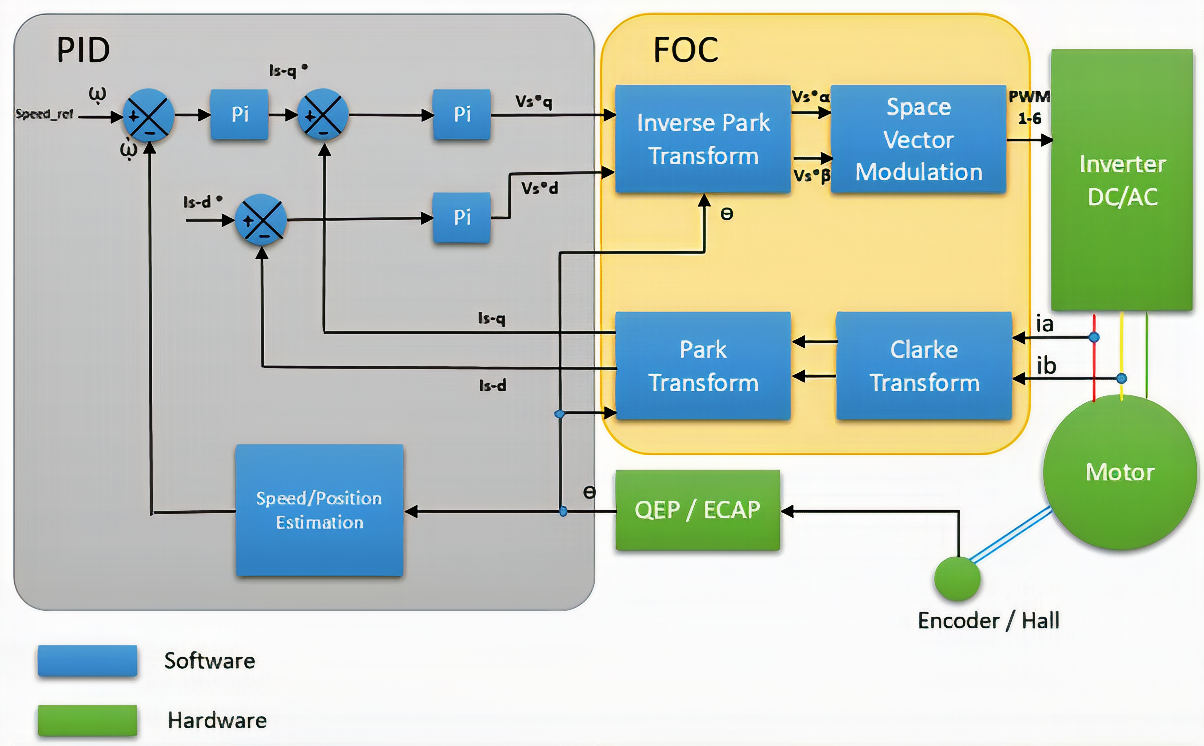
Abbildung 1:Das Diagramm zeigt Hard- und Softwarekomponenten einer LWL-basierten Motorsteuerung. Quelle:Texas Instruments
Lassen Sie uns die einzelnen Software- und Hardwarekomponenten verstehen:
- Dreiphasiger Wechselrichter :Ein dreiphasiger AC/DC-Wechselrichter liefert die dreiphasige Spannung zum Antrieb des PMSM/BLDC-Motors. Es nimmt Pulsweitenmodulationssignale (PWM) aus dem Raumvektormodulationsblock (SVM) entgegen.
- QEP-Schnittstelle :Es ist mit einem Encoder verbunden, um die mechanische Position des Rotors zu ermitteln und an andere Blöcke weiterzugeben.
- Geschwindigkeits-/Positionsschätzungsblock :Wie der Name schon sagt, werden in diesem Block Berechnungen zur Ermittlung der Rotorposition und -drehzahl durchgeführt.
- PID-Steuerung :Proportional-Integral-Derivat (PID) ist ein Regelkreis, der auf der Rückmeldung vom Motor in Form von Drehmoment beruht. Durch Berechnen der Differenz zwischen dem gewünschten Drehmoment und dem vom Park-Transformationsblock empfangenen Drehmoment wird die Korrektur vorgenommen.
- Clarke-Transformation :Der Clarke-Transformationsblock wandelt den Statorstrom (ia, ib) unter Verwendung der Clarke-Transformationsformel in das Fluss- und Drehmoment-Koordinatensystem (d-q) um. Das stationäre Bezugssystem eines Dreiphasensystems wird in einem stationären Bezugssystem in ein Zweiquadrantensystem umgewandelt.
- Park-Transformation und inverse Park-Transformation :Dieser Block wandelt das stationäre Referenzsystem in ein rotierendes Referenzsystem mit einem Zweiphasensystem mit orthogonalen Achsen um. Die orthogonalen Komponenten sind d-q, die die Motordirekt- bzw. die Quadraturachse sind. Der inverse Park-Transformationsblock kommt ins Bild, wenn die Statorausgangsspannung zurück in eine stationäre Rahmenreferenz (Statorreferenz) umgewandelt werden muss.
- Raumvektormodulation :Dies ist eine Technik zur Bestimmung des PWM-Signals, das an den Motor angelegt werden soll. SVM nimmt den Statorspannungsvektor als Eingang und erzeugt eine dreiphasige Ausgangsspannung als Ausgang.
Als Nächstes untersuchen wir, wie diese Komponenten zum Antreiben eines Motors mit dem FOC-Algorithmus verwendet werden.
Eine Ansicht des FOC-Workflows
Damit ein dreiphasiger Elektromotor gesteuert werden kann, müssen wir dem Motor die richtige Spannung zuführen, indem wir die Phasenströme Ia, Ib, Ic lesen. Ohne eine Steuerung auf ihnen ist es nicht möglich, einen Statorflussvektor zu erstellen, der 90 Grad zum Rotorflussvektor liegt.
FOC ist ein rechenintensiver Algorithmus, der dazu beiträgt, dies und mehr mit Leichtigkeit zu erreichen, obwohl die Entwicklung von FOC ziemlich komplex ist. Der FOC-Algorithmus ist in der Lage, die Steuerung des Referenzrahmens für dreiphasige sinusförmige Ströme zu vereinfachen, indem er sie in Fluss- und Drehmoment-Referenzrahmen (d-q) zerlegt. Diese beiden Komponenten können separat gesteuert werden.
Bild 1 zeigt den Encoder/Hall, der die Position des Rotors ermittelt und an den Drehzahl-/Positionsblock weitergibt. Dieser Wert wird auch dem Park- und inversen Park-Transformationsblock zugeführt. Gleichzeitig werden die Phasenströme (ia, ib) des Motors dem Clarke-Transformationsblock zugeführt. Die Phasenströme des Motors werden durch Clarke-Transformation in zwei orthogonale Ströme (iα, iβ) umgewandelt. Die neu umgewandelten Phasenströme werden nun als drehmomenterzeugende bzw. flusserzeugende Ströme bezeichnet. Obwohl wir den Phasenstrom erfolgreich in Fluss- und Drehmomentkomponenten zerlegt haben, sind sie immer noch sinusförmig, was die Kontrolle erschwert, da sie sich ständig ändern.
Die nächste Aufgabe des FOC-Algorithmus besteht darin, die Sinuswellen zu beseitigen, was eine wichtige Eingabe erfordert – die Rotorposition. Wir sehen im Diagramm, dass dieser Wert auch dem Park-Transform-Block zugeführt wird. In diesem Block besteht der Trick darin, sich von einem stationären Bezugssystem – aus Sicht des Stators – zu einem rotierenden Bezugssystem aus Sicht des Rotors zu bewegen. Vereinfacht gesagt wandelt der Park-Transformationsblock die beiden Wechselströme (iα, iβ) in Gleichstrom um. Das macht es für den PID-Block ganz einfach, ihn so zu steuern, wie er es möchte.
Bringen wir jetzt den PID-Block ins Bild. Der Eingang zum PID-Block vom FOC-Block ist Iq und Id, Drehmoment- und Flusskomponente. Im Zusammenhang mit einem Elektrofahrzeug erhält der PID-Block eine Geschwindigkeitsreferenz, wenn der Fahrer das Gaspedal betätigt. Der PID-Block vergleicht nun die beiden Werte und berechnet den Fehler. Dieser Fehler ist der Wert, für den der PID-Block den Motor drehen muss. Die Ausgabe, die der PID-Block liefert, ist Vq und Vd. Diese Ausgabe erreicht die inverse Clarke- und Park-Transformation, bei der das genaue Gegenteil der Clarke- und Park-Transformation stattfindet. Der inverse Park-Transformationsblock transformiert das rotierende Referenzsystem in das stationäre Referenzsystem, sodass ihre Motorphasen kommutiert werden können.
Klick für Bild in voller Größe
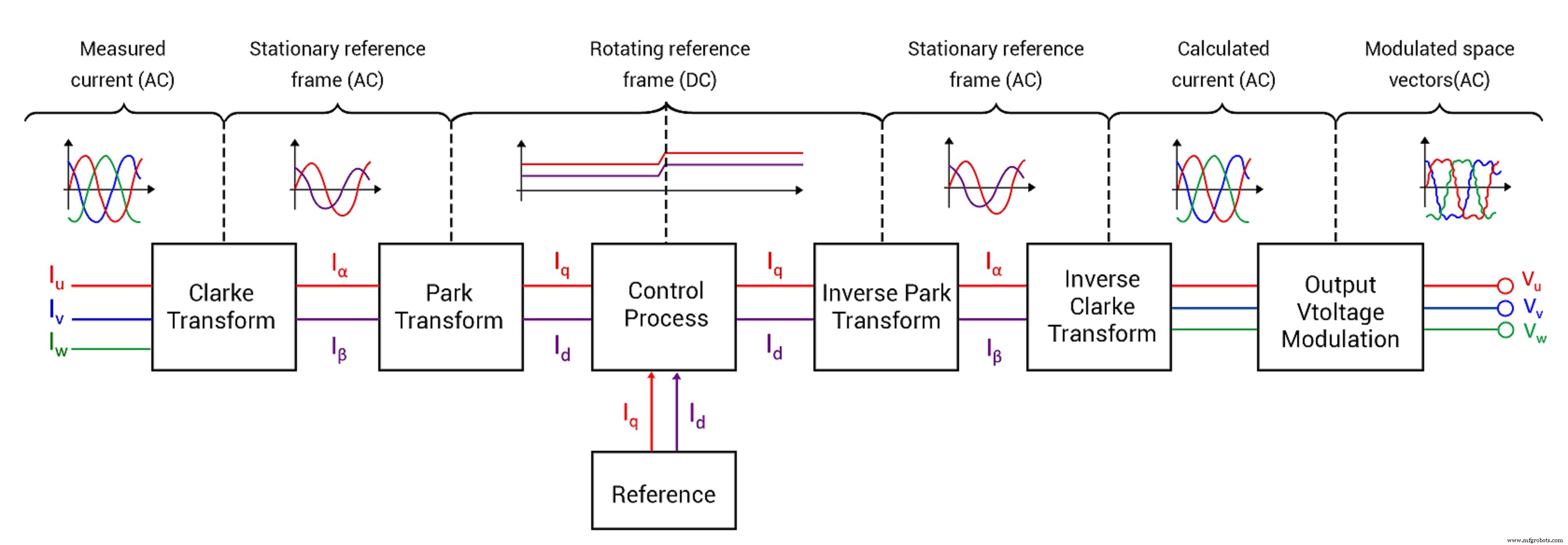
Abbildung 2:Die Ausgabe von PID erreicht die inverse Clarke- und Park-Transformation, wo das genaue Gegenteil der Clarke- und Park-Transformation stattfindet. Quelle:Texas Instruments
Im letzten Schritt der FOC-Algorithmus-basierten Motorsteuerung kommt der Raumvektormodulation (SVM) eine große Bedeutung zu. Die Aufgabe von SVM besteht darin, die PWM-Signale zu erzeugen, die in den Wechselrichter eingespeist werden, der wiederum die dreiphasige Spannung erzeugt, die den Motor antreibt. In gewisser Weise übernimmt SVM auch die Aufgabe einer inversen Clarke-Transformation.
Ein dreiphasiger Wechselrichter hat sechs Transistoren, die die Ausgangsspannung an den Motor liefern. Es gibt im Wesentlichen zwei Zustände, in denen diese Ausgänge entweder mit einem oberen Transistor geschlossen und einem unteren offen sein müssen oder umgekehrt. Bei zwei Zuständen und drei Ausgängen insgesamt acht Zustände (2 3 ) berechnet werden. Wenn Sie diese acht Zustände, auch Basisvektoren genannt, in ein sechseckiges Sterndiagramm einzeichnen, werden Sie feststellen, dass jeder benachbarte Vektor in Bezug auf die Phasendifferenz 60 Grad voneinander entfernt ist. Das SVM findet den Mittelwertvektor, der die Ausgangsspannung angibt (Vout ).
De-facto EV-Motorsteuerung
FOC als Motorsteuerungsschema ist für EV-Designs unverzichtbar. Mit der Art von geräuschlosem und reibungslosem Motorbetrieb, die von einem Elektrofahrzeug verlangt wird, sticht FOC als eine gute Wahl heraus. Viele OEMs und Entwickler von Steuerungssystemen optimieren häufig den Standard-FOC-Algorithmus, um den einzigartigen Anforderungen ihres EV-Programms gerecht zu werden, aber das Kernkonzept bleibt dasselbe.
Die Fortschritte bei MCUs in Automobilqualität, wie die Mikrocontroller der PIC18Fxx39-Familie von Microchip oder die C2000-Echtzeit-Mikrocontroller von TI, können die Entwicklung eines FOC-Algorithmus für EV-Motorsteuerungssysteme beschleunigen.
>> Dieser Artikel wurde ursprünglich auf unserer Schwesterseite EDN . veröffentlicht .
 Vaibhav Anand ist Digital Marketing Executive bei Embitel.
Vaibhav Anand ist Digital Marketing Executive bei Embitel.  Saurabh S. Khobe ist Embedded Engineer bei Embitel.
Saurabh S. Khobe ist Embedded Engineer bei Embitel.
Verwandte Inhalte:
- Lösung der Designherausforderungen für deterministische Mehrachsen-Motorsteuerungen
- Einen EV-Traktionswechselrichter sicher steuern
- Neue Lösungen verbessern das Energiemanagement von Elektrofahrzeugen
- Ermitteln der Anforderungen für die E/E-Entwicklung
- Motorcontroller integriert Arm Cortex-M0-Kern
Für mehr Embedded, abonnieren Sie den wöchentlichen E-Mail-Newsletter von Embedded.
Eingebettet
- Freigabe- und Interlock-Schaltungen
- Motorsteuerkreise
- Software-Suite vereinfacht Motorsteuerungsdesigns
- DATENMODUL:23,1-Zoll-Ultra-Stretch-TFT-Display mit intelligenter Steuerung
- Maximum:Bidirektionaler Strommessverstärker mit PWM-Unterdrückung
- Motorcontroller integriert Arm Cortex-M0-Kern
- Lanner:Virtualisierungsoptimierte Lösung mit Mehrkernprozessor
- Blog:Medizinische Wearables mit großer Leistung
- Drehmaschine mit CNC
- Warum Sie SEW-Eurodrive all Ihre Motorsteuerungsanforderungen anvertrauen sollten