


Forscher entwickeln Roboter-Fingerspitzen zum Greifen und Loslassen von Gegenständen unter trockenen und nassen Bedingungen
Ein Forscherteam der Universität Kanazawa hat ein Robotersteuerungssystem – oder Fingerspitzen – zum Greifen und Loslassen von Objekten unter trockenen und nassen Bedingungen entwickelt.
Die Forscher sagen, dass die Studie verifizieren konnte, dass „das Greifen von Objekten durch flüssige Fingerspitzen mit weicher Oberfläche und hoher Reibung durch Auftragen eines geeigneten Gleitmittels kontrollierbar war“.
Sie fügten jedoch hinzu, dass es notwendig sei, weitere Experimente unter verschiedenen Bedingungen durchzuführen, um die aktuelle Steuerungstechnologie auf Produktionsumgebungen anzuwenden.
Nichtsdestotrotz wird erwartet, dass diese Studie einen Schritt nach vorn für die Realisierung der Arbeitsautomatisierung zum Beispiel des Greifens und Loslassens von Objekten auf engstem Raum darstellt.
Industrieroboter sind mittlerweile weit verbreitet und aus der Automobilherstellung und anderen Bereichen nicht mehr wegzudenken. Herkömmliche Roboterhände eignen sich zum Greifen harter Objekte mit fester Form, wohingegen es nicht einfach ist, komplizierte Objekte zu greifen oder weiche Objekte sanft zu greifen.
Unter verschiedenen Bedingungen ist es auch erforderlich, auf physikalische Eigenschaften von Objekten wie Oberflächeneigenschaften zu reagieren:trocken, nass usw.
Eine Fingerspitze mit weicher Oberfläche einer Roboterhand ist verformbar und kann ein Objekt komplizierter Form ziemlich leicht greifen, da die Kontaktfläche durch Oberflächenverformung als Reaktion auf die Objektform vergrößert werden kann.
Fingerspitzen mit weicher Oberfläche sind sehr effektiv beim Greifen weicher Gegenstände; sogar Tofu kann gegriffen werden.
Im Allgemeinen ist jedoch die Oberflächenreibung von weichem Material hoch, was das Lösen erschwert. Es ist auch schwierig, Objekte an gewünschten Positionen freizugeben, insbesondere in Fällen, in denen der Arbeitsraum eng ist.
Die Forschungsgruppe wurde von Professor Tetsuyou Watanabe an der Universität Kanazawa geleitet und forschte an der Steuerungstechnologie zum Greifen von Objekten mit den Fingerspitzen von Roboterhänden.
In der vorliegenden Studie zielte die Gruppe darauf ab, ein Reibungskontrollsystem zu entwickeln.
Die Gruppe benutzte die weichen Fingerspitzen einer Roboterhand zum Greifen von Objekten; das Lösen erfolgte durch Auftragen (Injizieren) eines Gleitmittels.
In dieser Studie wurde absolutes Ethanol (>99,5%) als Gleitmittel verwendet, da Ethanol chemisch unbedenklich und leicht zu trocknen ist und da seine Oberflächenspannung niedrig ist.
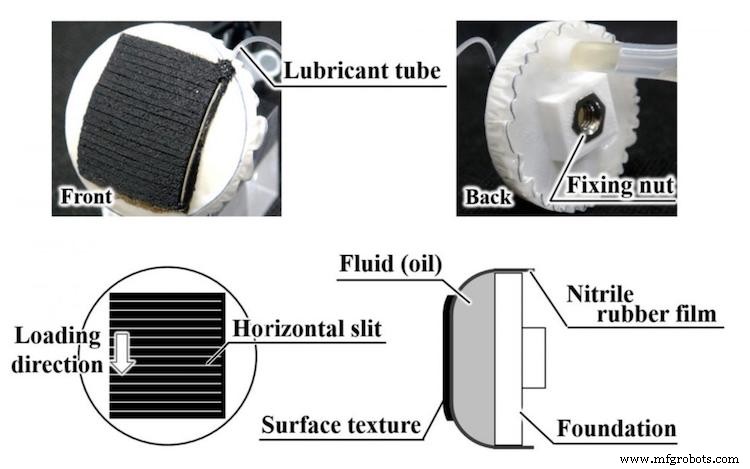
Wie in Abbildung 1 zu sehen, wurde ein Nitrilkautschukfilm an die Seiten der Fingerspitzenbasis geklebt, um einen Raum zum Füllen mit Kettensägenöl zu schaffen, um eine „flüssige Fingerspitze“ herzustellen.
Dann wurde eine Silikon-„Textur“ gebunden, um den Gummifilm zu beschichten; Das Material der „Textur“ war ein Silikondichtstoff mit Schlitzen, deren Abstand 1,5 mm betrug, senkrecht zur Belastungsrichtung.
Die Schlitze wurden für eine große Reibung im wasserfeuchten Zustand und zur Schmierstoffverteilung eingebracht.
Mit dieser flüssigen Fingerkuppe wurden Gegenstände aus verschiedenen Materialien gegriffen, die für Küchenutensilien verwendet werden, und es wurde nachgewiesen, dass beim Auftragen des Gleitmittels die Reibung tatsächlich verringert wurde.
Die Reibung wurde sowohl unter trockenen als auch unter nassen Bedingungen verringert, wohingegen eine solche Schmierwirkung unter öligen Bedingungen nicht beobachtet wurde.
Als nächstes wurde eine Aufgabensimulation zum Verpacken von Kartons durchgeführt. Eine Papierschachtel wurde mit zwei flüssigen Fingerkuppen von beiden Seiten gegriffen.
Die oben beschriebene „Textur“ wurde auf jede flüssige Fingerkuppe geklebt. Ein stabiles Greifen wurde bestätigt, indem ein Gewicht auf die Papierschachtel gelegt wurde.
Nach dem Entfernen des Gewichts wurde Schmiermittel in beide flüssigen Fingerspitzen gespritzt, was ein Herunterrutschen der Papierschachtel in ziemlich kurzer Zeit (weniger als 2,5 s) verursachte, so dass die Verpackungsaufgabe der Papierschachtel abgeschlossen war.
Wie hier gezeigt, wurde eine „Textur“ mit hoher Reibung an die flüssige Fingerspitze gebunden, und das Einspritzen eines Gleitmittels (hier absolutes Ethanol) verringerte die Reibung.
Daher wurde das Loslassen und Platzieren eines Objekts an einer gewünschten Position durch Steuern der Reibung erreicht, ohne die Fingerspitzen zu bewegen.
Automatisierungssteuerung System
- Entwerfen einer Schalttafel für einen Fischtrawler
- Benutzerdefinierte 3D-Druck-Kraftstoffeinspritz-Greifer für einen Pick-and-Place-Roboter
- Essentium und Lehvoss kooperieren bei der Entwicklung von Materialien für die additive Fertigung
- DSM und Nedcam entwickeln neue Anwendungen für den großformatigen 3D-Druck
- Sepro führt Apps zur Verbesserung der Robotersoftware ein
- Automatisierung für IML und Stapelformen
- 'Künstlerischer' Roboter bei NPE
- 3 Vorteile der Robotersimulation für Hersteller und andere Roboterbenutzer
- Robotik- und Automatisierungsnachrichten sind gut für ABB, sagt CEO
- Fanuc und Plus One Robotics entwickeln Automatisierungslösungen für die Abwicklung des E-Commerce