


Raspberry-Pi-Roboter:So bauen Sie einen Raspberry-Pi-Roboter
Himbeer-Pi
Finden Sie es schwierig und komplex, einen Raspberry Pi-Roboter zu bauen? Dann sind Sie hier genau richtig.
In der Tat, wenn Sie ein Pi-Board für Ihren Roboter verwenden, erhalten Sie einen kompletten Computer zu einem erschwinglichen Preis. Wenn Sie dies also mit seinem kleinen Formfaktor und umfangreicher Community-Unterstützung kombinieren, wird es ein großartiges Board, selbst für Anfänger.
Das Eintauchen in die Welt der Robotik bedeutet jedoch, in fortgeschrittenere Schaltungsdesigns einzutauchen. Aber keine Sorge, wir machen es Ihnen so einfach wie möglich. https://www.wellpcb.com/
In diesem Artikel behandeln wir also, wie Sie einen Raspberry Pi-Roboter bauen und welche verschiedenen Pi-Roboterprojekte Sie erstellen können.
Wie man einen Raspberry Pi-Roboter baut
Hier zeigen wir Ihnen, wie Sie einen anfängerfreundlichen Pi-Roboter bauen, der Hindernissen ausweichen und frei navigieren kann. Hier sind die Teile, die Sie für dieses Projekt benötigen:
- Raspberry Pi (B, B+ oder 2 Modelle)
- DC-Getriebemotoren (1)
- Laufrad (1)
- SD-Karte (1)
- Maus (1)
- Druckknopf (1)
- Maus (1)
- 200R-Widerstand (1)
- Brotbrett (1)
- Doppelseitiges Klebeband (1)
- Tastatur
- L293D-Treiber (1)
- Jumper von Stecker zu Stecker oder von Stecker zu Stecker (1)
- Roboterchassis und -räder (1)
- IR-Sensormodule (1)
Aufbau des Projekts
Zuerst müssen wir den IR-Sensor mit dem Raspberry Pi verbinden. Setzen Sie dazu Ihren Raspberry Pi auf, nachdem Sie ihn an Ihre Tastatur, Maus und Ihren Monitor angeschlossen haben. Klicken Sie als Nächstes auf Ihren Sensor und vergewissern Sie sich, dass er ordnungsgemäß funktioniert.
Verbinden Sie anschließend den 5V-Pin und den GND-Pin des Pi mit dem Sensor für die Stromversorgung. Klicken Sie als nächstes den B-Pin des Sensors auf die GPIO-Pins 16 und 3. Überprüfen Sie abschließend die Pin-Konfiguration des GPIO.BOARD.
Geben Sie als Nächstes den folgenden Code ein und speichern Sie ihn als Python-Datei, vorzugsweise irtest.py.
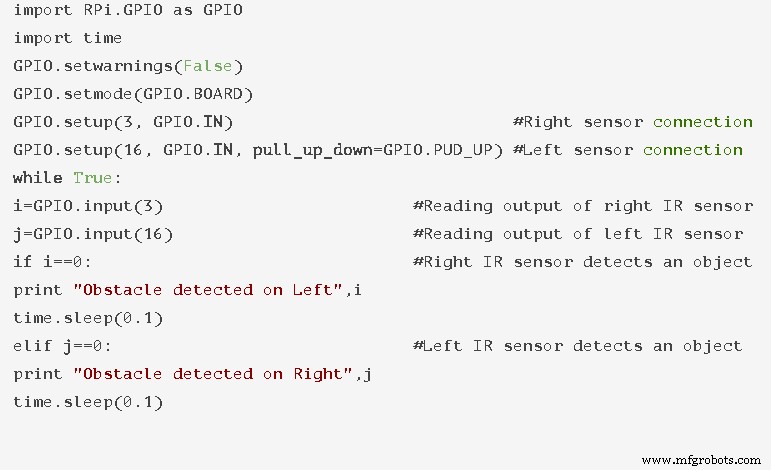
Code für Python-Datei
Nachdem Sie die Python-Datei gespeichert und ausgeführt haben, werden Sie die folgenden Ausgabeausdrucke bemerken, wenn Sie den Sensor blockieren:
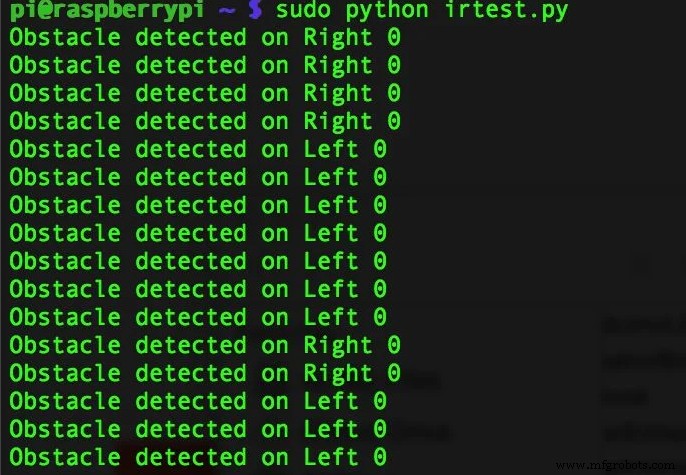
Drucke für Python-Datei ausgeben
Versuchen Sie also, Ihre Verbindungen zu überprüfen oder Ihre Komponenten auszutauschen, wenn es nicht funktioniert.
Verbinden Sie Ihre Motoren mit dem L293D
Jetzt verwenden wir das L293D-Modul, um die Motoren anzuschließen. Aber zuerst den L293D über + und – Pins mit Strom versorgen. Verbinden Sie dann auch diese Stromversorgungsstifte mit der Platine der 9-V-Batterie.
Vollständige Schaltungsverbindung
Verbinden Sie außerdem den – Pin von L293D mit dem GND-Pin des Pi. Sehen Sie sich das Diagramm unten an, um sich ein klares Bild von den Anschlüssen zu machen.
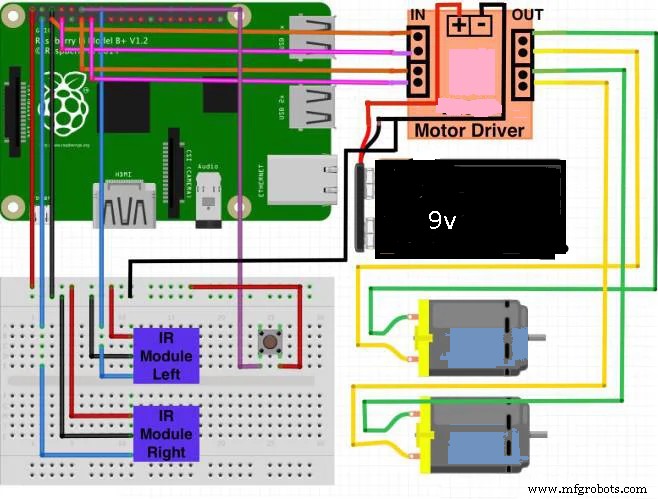
Verwenden Sie außerdem vier Ausgangs-GPIO-Pins, um Eingänge für das Board zu erstellen. Außerdem können Sie diese Ausgangspins verwenden, um zu steuern, in welche Richtung sich die beiden Motoren drehen.
Außerdem können Sie die beiden Motorklemmen mit den vier Ausgangsklemmen der Platine verbinden. Bringen Sie schließlich einen Druckknopf zum Aktivieren oder Deaktivieren Ihres Roboters für Ihre letzte Verbindung an.
Endgültige Konstruktion
Jetzt können Sie Ihren Motoren Räder hinzufügen und Ihre Verbindungen an Ihrem Roboterchassis montieren. Stellen Sie sicher, dass Sie die Teile mit Ihrem doppelseitigen Klebeband sichern, damit sie nicht herunterfallen.
Vergessen Sie nicht, Ihre Motoren mit dem folgenden Code zu testen. Stellen Sie außerdem sicher, dass Sie den Code als Python-Datei speichern:moto.py. Verwenden Sie dann den Befehl sudo motor.py, um den Code auszuführen. Ihre Motoren sollten sich drehen, wenn es funktioniert.
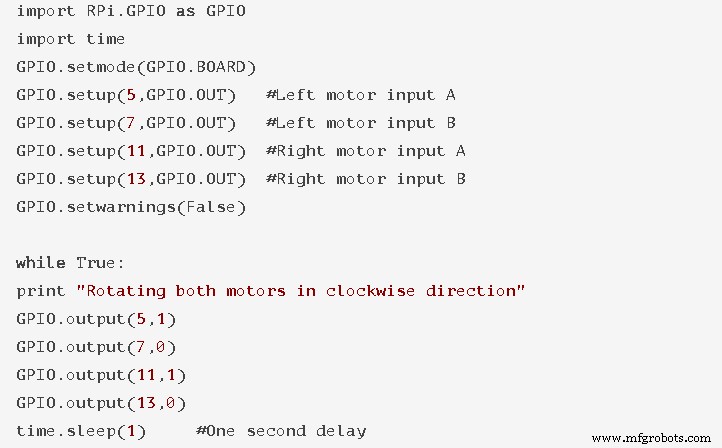
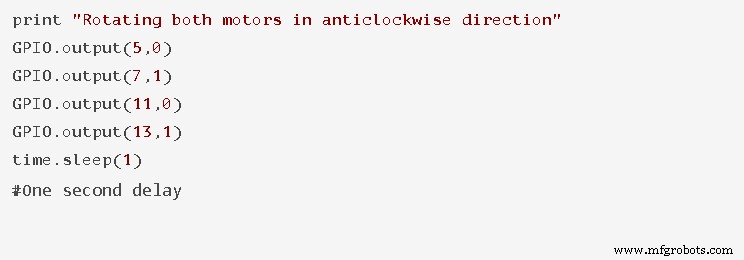
Code zum Testen von Motoren
Wie es funktioniert
Wenn Sie den Druckknopf drücken, wird der Roboter aktiviert und beginnt sich zu bewegen. Während er sich vorwärts bewegt, sucht der Roboter mit dem IR-Sensor nach Objekten, die seinen Weg blockieren. Sobald es ein Hindernis erkennt, erlaubt der Pi dem Roboter, um das Hindernis herum zu manövrieren. Auch hier können Sie den Roboter durch Drücken der Taste deaktivieren.
Raspberry Pi-Roboterprojekte
Wenn Sie also das einfache Projekt oben abgeschlossen haben und nach weiteren Herausforderungen suchen, finden Sie hier einige hervorragende Projektideen zum Ausprobieren.
1. CHOP Vierbeiniger Roboter

Vierbeiniger Roboter hacken
Tatsächlich ist der vierbeinige Chop-Roboter ein DIY-Projekt, das dem Spot von Boston Dynamics ähnelt. Darüber hinaus ist das CHOP-Projekt Open Source. Daher können Sie es mit ein paar 3D-gedruckten Teilen und anderen Materialien anpassen und anpassen.
Zweifellos sind der Raspberry Pi 4B und ein Arduino Mega die wesentlichen Komponenten dieses Roboters. Außerdem filtert der Arduino Daten von Sensoren und verbindet sich mit den Servocontrollern. Andererseits sammelt der Pi alle Daten und führt verschiedene Python-Skripte aus, um die Bewegung des Roboters zu steuern.
Darüber hinaus verwendet der Pi ein inverses kinematisches Modell, um zu steuern, wie sich die Servos bewegen. Schließlich können Sie einen Bluetooth-Controller verwenden, um die Richtung des Roboters zu steuern.
2. Ping-Pong-Roboter
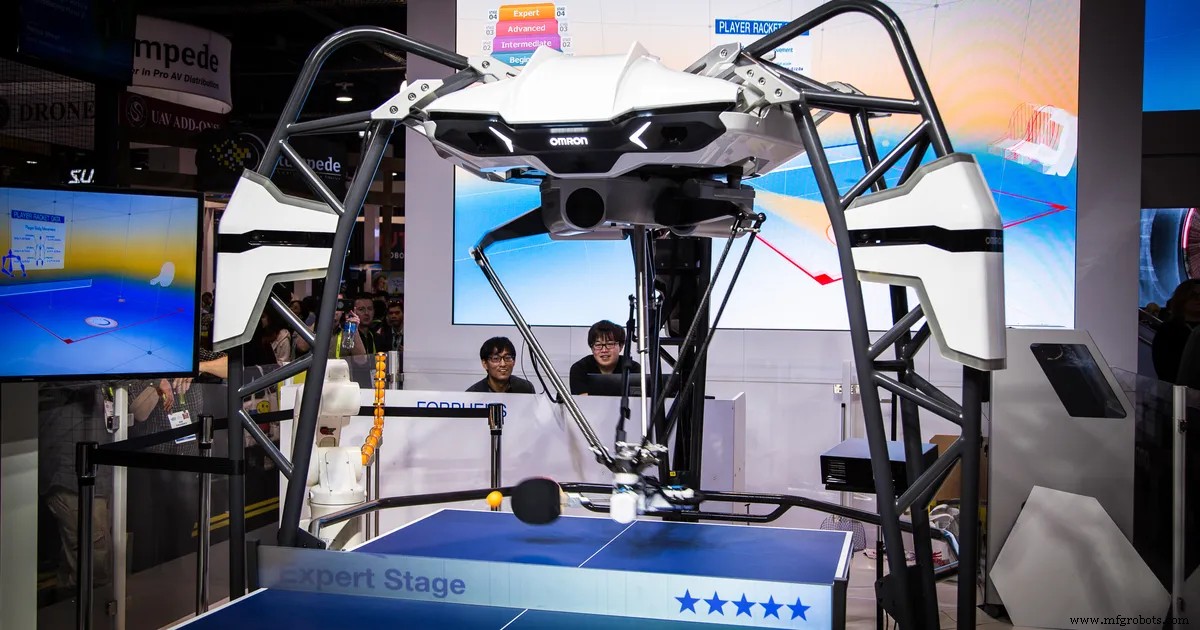
Ping-Pong-Roboter
Der Ping-Pong-Roboter ist in der Lage, mit Menschen Tischtennis zu spielen. Und auf verschiedenen Ebenen, von fortgeschritten bis einfach.
Sie verwenden den Ping-Pong-Bot für Freizeitspiele oder intensives Training. Sie können jedoch eine kommerzielle Version für etwa zweitausend Dollar erwerben. Oder erstellen Sie mühelos eine DIY-Version mit Teilen, die Sie bereits haben, 3D-gedruckte und lasergeschnittene Teile.
Außerdem können Sie sich über WLAN mit dem Bot verbinden und haben die vollständige Kontrolle.
3. Raspberry Pi Humanoider Roboter

Humanoider Roboter
Sie können Ihren humanoiden Roboter mit einem Raspberry Pi bauen. Einige humanoide Roboter verfügen über Hindernisvermeidung, Ultraschall-Entfernungserkennung oder drahtlose Steuerungsfunktionen.
Unabhängig von der Funktion benötigen Sie für dieses Projekt ein Robotics Bioloid-Kit, ein Gyroskop und einen Abstandssensor.
Außerdem empfehlen wir die Verwendung des kleineren Raspberry Pi Zero und eines einzelligen 2500-mAh-Akkus für die Stromversorgung.
Außerdem benötigen Sie einen Analog-Digital-Wandler-Chip, damit Sie die Daten vom Sensor lesen können.
4. Pi Roomba

Roomba
Wenn Sie Erfahrung mit Robotik haben, haben Sie wahrscheinlich schon von einem Roomba-Roboter-Staubsauger gehört.
Sie können Ihren jedoch mit einem Raspberry Pi und intelligenteren Bewegungen bauen.
Sie benötigen eine serielle Roomba 530-Schnittstelle, damit Sie eine Verbindung zu Ihrem Raspberry Pi herstellen können.
Außerdem verwenden Sie ein Javascript-Paket für die Codierung. Die Box verwendet auch einen RxTX, um mit dem Roboter zu kommunizieren.
Außerdem können Sie den Roomba mit einem Joystick steuern und sogar Ihren Ausgangspegel einstellen.
5. Butterroboter
Der intelligente Butterroboter kann Videos in hervorragender Qualität aufnehmen und streamen. Außerdem kann es Audio aufnehmen und ausgeben.
Das Beste daran ist, dass Sie nur ein Raspberry Pi-Kameramodul und ein USB-Gerät benötigen, um diese Sounds und Videos aufzunehmen.
Zu den Komponenten des Roboters gehören jedoch:
- Raspberry Pi Zero W
- RPi-Kameramodul
- Gleichstrommotoren
- USB-Audioplatine
- Motortreiber L9110
- Led
- Akku
- 9g-Servos
- Schiebeschalter
- Sprecher
Sie können diesen Roboter auch über die Blynk-App verwenden, die Videostreaming unterstützt.
6. Petoi Roboterkatze
Mit dem mechanischen Open-Source-Katzenprojekt Nybble können Sie eine liebenswerte Roboterkatze bauen. Außerdem können Sie anstelle von 3D-gedruckten Teilen lasergeschnittene Holzteile verwenden.
Weitere Komponenten für dieses Projekt sind ein Raspberry Pi 3B+, das Nybble-Kit und ein Sparkfun Arduino Pro Mini.
Außerdem können Sie die Bewegung dieses Roboters mit einem Arduino-kompatiblen Mikrocontroller steuern. Die Roboterkatze kann auch ein Muskelgedächtnis speichern, wodurch sie sich daran erinnern kann, wie sie sich bewegt.
Darüber hinaus ermöglicht Ihnen der Raspberry Pi in diesem Projekt, den Nybble-Code anzupassen und einfache Befehle zu geben.
7. Spot Micro
Der Spot Micro ist eine kleinere Version des beliebten Spot-Vierfachroboters. Außerdem können Sie einen Trab- und einen Schrittgang mit dreiachsigen "Winkelbefehlssteuerungsmodi" erhalten.
Der Roboter läuft auf einem Raspberry Pi 3B mit Ubuntu. Außerdem verwendet es ein C++- und Python-Framework.
Außerdem benötigen Sie die folgenden Komponenten, wenn Sie dieses Projekt ausprobieren möchten:
- Raspberry Pi 3 B
- 15×2 LCD-Panel
- PCA9685-Servoplatine
- 4000-mAh-Akku
- 5-Volt-Spannungsregler
- 3D-gedruckte Teile
- Lider (optional für Raumzuordnung)
8. Miniatur-Kampfroboter
Willst du einen mächtigen Kampfroboter bauen? Dann können Sie dieses Projekt ausprobieren. Mit dem Raspberry Pi Zero können Sie Eingaben von einem Bluetooth-Controller in Befehle für die Motorsteuerung Ihres Roboters übersetzen.
Anstatt einen RC-Sender zu verwenden, verwendet das Projekt eine einfachere GPIO-Pin-Konfiguration.
Es wäre hilfreich, wenn Sie ein L298N-Board für die Fortbewegung, einen Tarot TL300G ESC zum Drehen der bürstenlosen Motoren und einen 500-mAh-Akku hätten. Und Sie haben selbst einen Mini-Kampfroboter auf einem 3D-gedruckten Chassis.
9. Raspberry Pi Devastator Roboter

Verwüsterroboter
Wie der Name schon sagt, können Sie mit einem Raspberry Pi Zero W einen Robotertank bauen. Der gesamte Build umfasst eine 3D-gedruckte benutzerdefinierte Halterung, etwas Python-Code und eine Motorsteuerungsschaltung. Sie können auch eine montierte Kamera hinzufügen.
Alternativ finden Sie alles, was Sie für dieses Projekt benötigen, auf der mobilen Devastator Tank-Plattform.
Schlussworte
Der Raspberry Pi ist ein vielseitiger Mini-Computer, der für verschiedene Anwendungen funktioniert. Die meisten der in diesem Artikel aufgeführten Raspberry Pi-Roboterprojekte verwenden nur anfängerfreundliches Python.
Wenn Sie nicht alle für ein Projekt erforderlichen Komponenten finden können, können Sie Roboterbausätze ausprobieren. Durch den Kauf von automatischer Ausrüstung erhalten Sie fertige Details für Ihr Roboterprojekt.
Sie benötigen jedoch grundlegende oder fortgeschrittene Fähigkeiten, um sich an einem dieser Projekte zu versuchen.
Haben Sie irgendwelche Fragen? Nehmen Sie Kontakt mit uns auf und wir helfen Ihnen gerne weiter.
Industrietechnik
- Wie 3D-Drucker Metallobjekte bauen
- So bauen Sie eine Stromspiegelschaltung
- So erstellen Sie eine Arduino+Raspberry Pi-Roboterplattform
- Roboter mit Raspberry Pi und Bridge Shield
- Raspberry Pi CD-Box-Roboter
- WLAN-gesteuerter Roboter mit Raspberry Pi
- So erstellen Sie ein elektrisches Wartungsprogramm
- So erstellen Sie eine IoT-Produkt-Roadmap
- So bauen Sie Sauron, den Herrn der Roboter
- So erstellen Sie ein elektrisches Wartungsprogramm