


L298 – Umfassende Erläuterung des Motortreibermoduls
Eine H-Brücke ist eine elektronische Schaltung, die durch Umschalten der an die Last angelegten Spannungspolarität funktioniert. Ihre Anwendungen liegen in der Robotik, wo sie die Rückwärts- und Vorwärtsbewegung von Gleichstrommotoren ermöglichen. Es gibt mehrere Möglichkeiten, eine H-Brücke zu bauen. Eine davon beinhaltet die Verwendung von Relais wie der integrierten Schaltung L298.
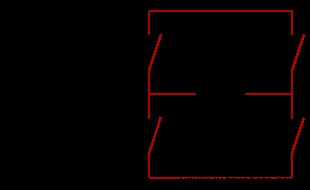
H-Brücke rot hervorgehoben.
Was ist L298?
L298 ist ein Hochstrom-Hochspannungs-Dual-Vollbrückentreiber, der für den Betrieb induktiver Lasten wie Schrittmotoren, Relais usw. hergestellt wurde. Er empfängt auch Standard-TTL-Logiksignale (Transistor-Transistor-Logik).

L298 Dual-H-Brücken-Motortreiber
In einer anderen Definition ist L298 eine integrierte monolithische Schaltung in PowerSO20- und 15-Leiter-Multiwatt-Gehäusen.
Es verfügt über zwei Freigabeeingänge, die unabhängig von den Eingangssignalen ein an seinem Ausgang angeschlossenes Gerät unabhängig voneinander deaktivieren oder aktivieren. Zusätzlich regelt es die Drehrichtung bei Gleichstrommotoren.
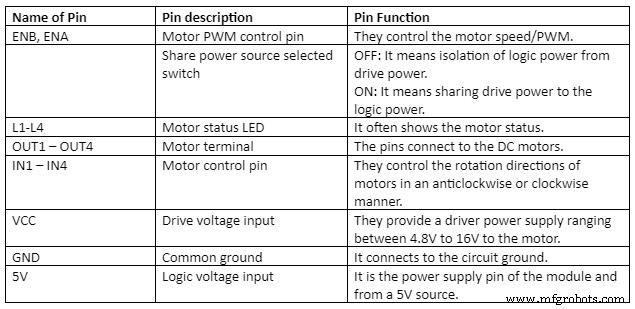
L298-Pin-Konfiguration
Wir werden eine Tabelle verwenden, um die Pinbelegung von L298 zusammenzufassen.
Eigenschaften von L298
Zu den Merkmalen oder Merkmalen von L298 gehören:
- Erstens hat es eine Betriebsversorgungsspannung von bis zu 46 V.
- Außerdem beträgt sein Gesamt-DC ungefähr 4A. Hier beträgt der Dauerarbeitsstrom bis zu 2A, während der momentane Spitzenstrom 3A beträgt.
- Dann verfügt es über einen Übertemperaturschutz durch eine Freilaufdiode und einen hochkapazitiven Siebkondensator. Die Komponenten verhindern, dass der Rückstrom einer induktiven Last das Gerät erreicht.
- Seine Lagertemperatur reicht von -40 °C bis 150 °C, während seine Betriebstemperatur -23 °C bis 130 °C beträgt.
- Es hat eine niedrige Sättigungsspannung und eine Nennleistung von 25 W.
- Seine Störfestigkeit entsteht durch eine logische „0“-Eingangsspannung von etwa 1,5 V.
- Es hat auch Sockel-Pin-Anschlüsse, die bei einer einfachen Logikschnittstelle helfen.
- Schließlich kann es zwei Gleichstrommotoren, einen Vierphasen-Schrittmotor und einen Zweiphasen-Schrittmotor betreiben.
L298n Motortreiber
Im Allgemeinen verwenden Hersteller verschiedene L298n-Module, um Motortreiber herzustellen. Beispiele beinhalten;
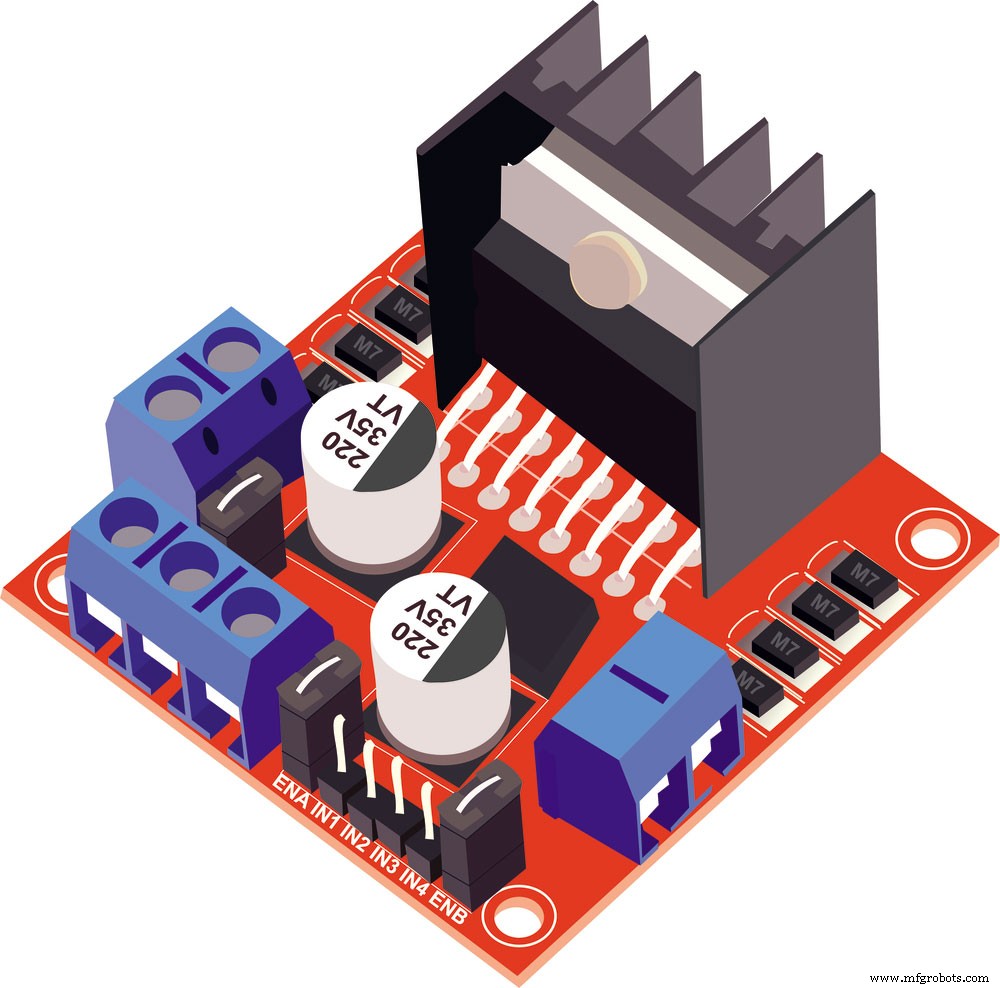
(l298n-Treiberplatinenmodul)
- L298 Dual-H-Brücken-Motortreiber
Wie bereits erwähnt, handelt es sich um einen Hochstrom-Hochspannungs-Doppel-Vollbrückentreiber, der häufig in einem Doppel-H-Treibermodul eingesetzt werden kann. Die H-Brücke steuert die Drehrichtung bei Gleichstrommotoren.
- Motortreiber-L298-Modul
Ein Motortreiber L298-Modul regelt die Richtung und Geschwindigkeit von 2 Gleichstrommotoren auf etwa 40 V 3 A.
Eine separate Stromquelle versorgt den Motor mit Strom, während ein Gadgeteer-Mainboard das Modul während seines Betriebs mit Strom versorgt und steuert.
- Grove – I2C-DC-Motortreiber
Seine Funktion ist die direkte Steuerung eines Gleichstrom- (zwei Bürsten) oder Schrittmotors (ein 4-Draht-Zweiphasenmotor). In seiner Mitte befindet sich ein zweikanaliger H-Brücken-Treiberchip, der einem Strom von etwa 2 A pro Kanal standhalten kann.
(Elektro-Schrittmotor)
Ein Atmel ATmega8L steuert den Chip und kann I2C-Schnittstellen mit Plattformen wie Arduino verwalten. Es kann auch den Schritt- und Gleichstrommotor gleichzeitig in verschiedenen Richtungen und Geschwindigkeiten antreiben.
Wie funktioniert der Motortreiber L-298?
Der vollständige Schaltplan unten erläutert den Arbeitsablauf der internen Struktur im L298n-Motortreiber.
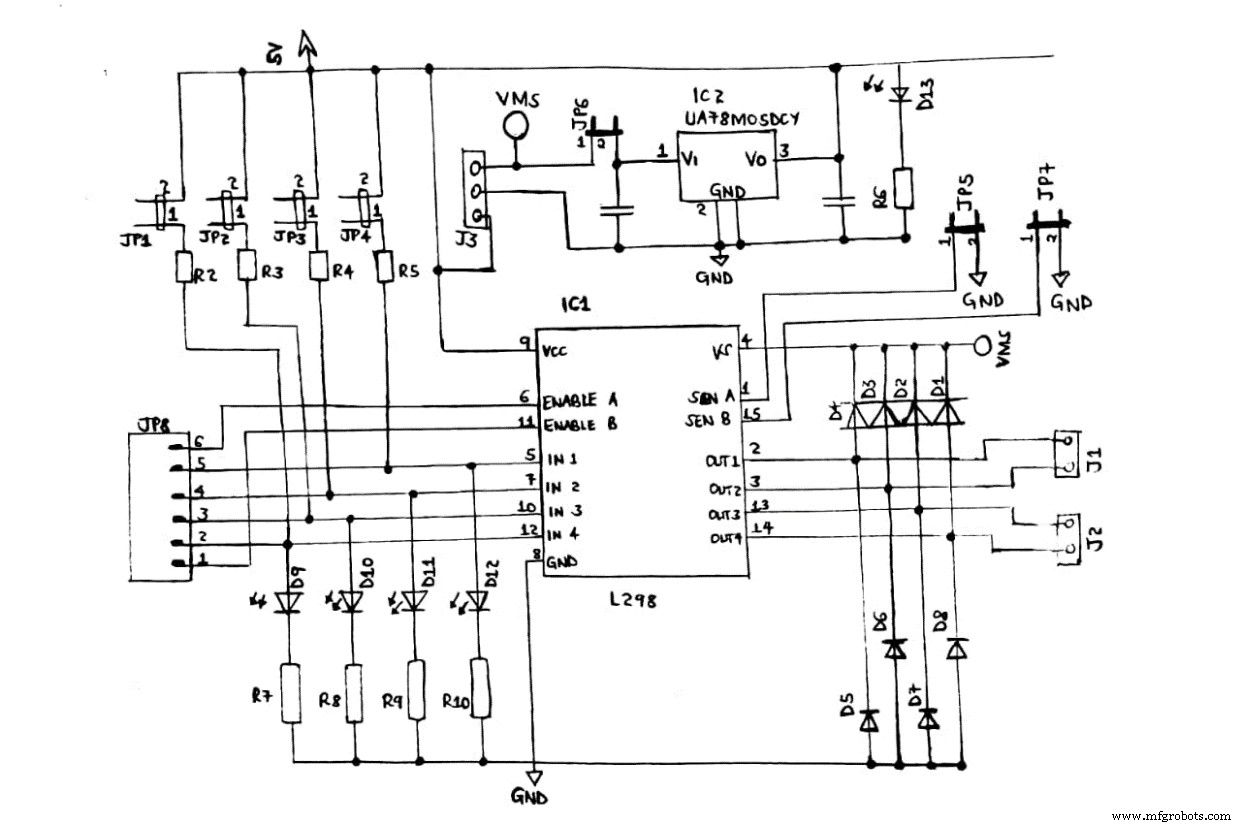
Ein schematisches Diagramm der Funktionsweise des L298n-Motortreibers
Die folgende Tabelle veranschaulicht die Zustände der Motoren eins und zwei und deren Steuerungsmodus.
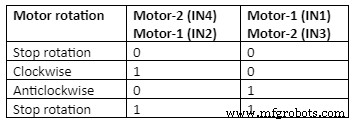
Tabellenerläuterung
- In erster Linie steuern die Steuerpins IN2 und IN1 (Motor1) und die Pins IN4 und IN3 (Motor2) die Drehrichtung.
- Dann, wenn Ihr aktiviertes Signal 1 ist;
- Die Steuerung von Motor A und Motor B wird ähnlich.
- IN2 ist 0 während IN1 =Linkslauf in Motor A.
- IN2 ist eins und IN1 ist 0 =Rechtsdrehung in Motor A.
- Wenn IN2 und IN1 11 oder 00 sind =ein Motorbremszustand.
- Darüber hinaus können Sie PWM-Steuerpins wie ENB für Motor2 und ENA für Motor1 verwenden, um die Motordrehzahl zu steuern. Stellen Sie bei Verwendung dieser Methode sicher, dass Sie die ausgegebenen PWM-Impulse für aktivierte Anschlüsse und die Richtung von IN2 und IN1 bestätigen.
L-298 Motorsteuerung mit Schnittstelle zu Arduino und DC-Motor
Im Allgemeinen hilft Ihnen eine l298-Dual-H-Brücke dabei, einen Motor in beide Richtungen zu drehen, da Sie die Stromrichtung wechseln können. Darüber hinaus können Sie einen Arduino mit PWN-Eingang integrieren, damit sich ein Motor in jede Richtung und Geschwindigkeit drehen kann.
Erforderliche Komponenten
- Basisschild V2,
- 2×130 DC-Motor,
- Grove – i2C-Motortreiber und
- Seeeduino V4.2/ Arduino UNO
Schritte
- Beginnen Sie mit der Einstellung der Adresse über den Wählschalter.
- Schließen Sie dann einen Grove-I2C-Motortreiber V1.3 an den Grove-Base-Shield-Port an.
- Drittens stecke deinen Hain-Basisschild V2 in Seeeduino ein.
- Verwenden Sie als Nächstes ein USB-Kabel, um Ihr Seeeduino mit dem PC zu verbinden.
- Verwenden Sie die GitHub-Site, um die Grove-I2C-Motortreiber-V1.3-Bibliothek zu erhalten.

(GitHub-Plattform)
- Installieren Sie danach die Arduino-Bibliothek.
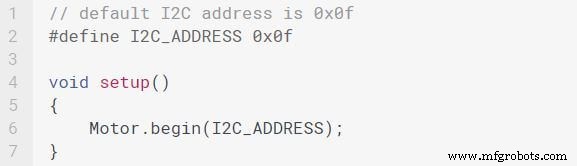
- Laden Sie zuletzt den kopierten Code in die Arduino IDE hoch. Der Code sollte dem folgenden ähneln:
Gleichstrommotoren steuern
- Die Speed-Funktionstasten stellen die gewünschte Motordrehzahl ein. Beispiele sind:
_speed; Es steht für eine einstellbare Geschwindigkeit. Er kann von -100 bis 100 (am langsamsten bis am schnellsten) reichen. Außerdem bedeutet Motordrehzahl <0 eine Richtung gegen den Uhrzeigersinn, während>0 eine Richtung im Uhrzeigersinn ist.
Motor_id; Es stellt Motortypen dar, d. h. Motor eins oder zwei.
- Zusätzlich haben wir eine Stoppfunktion, die einen laufenden Gleichstrommotor anhält, z. B. MOTOR1/2.
L298-Anwendungen
Einige der L298-Anwendungen umfassen:
- Hobbyprojekte,
- Engineering-Systeme,
- Automatische Türsteuerungssysteme,
- Roboter und Roboterarme
- CNC-Maschinen,

(Werkstatt mit CNC-Maschinen)
- Messinstrumente,
- Relaistreiber,
- Gewichtheber,
- Industriemaschinen und
- Verkaufsautomaten.
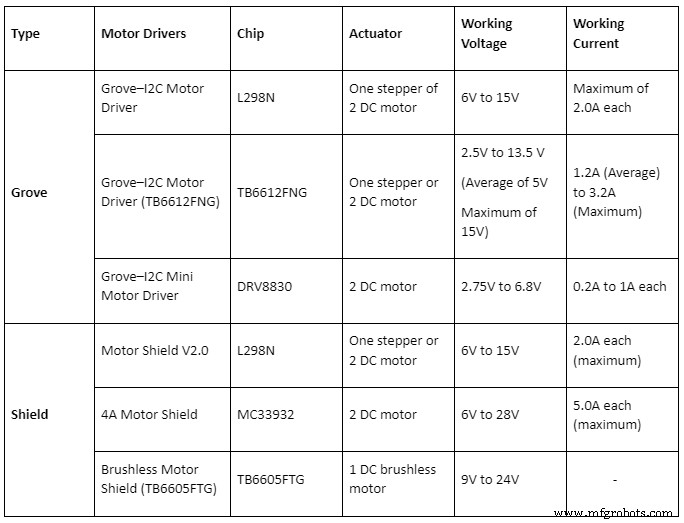
L298 im Vergleich zu anderen Motoren
Unbestreitbar gibt es mehrere Motortreiber wie Schritt- und Servomotoren auf den Märkten.
Schlussfolgerung
Zum Abschluss unseres Artikels über den l298n-Motortreiber hoffen wir, dass Sie sich mit der Technologie besser auskennen. Wenn Sie jedoch noch Fragen haben oder weitere Erläuterungen benötigen, wenden Sie sich bitte an uns. Wir helfen Ihnen gerne weiter.
Industrietechnik
- Die Bedeutung von Trends bei der Zuverlässigkeit von Elektromotoren
- Gewährleistung des Schutzes von Flottenfahrern in Zeiten von COVID-19
- Überwachung des Zustands von Anlagenmaschinen
- Motorwicklungen:Was sind die Unterschiede?
- Der vollständige Leitfaden zur Auswahl eines explosionsgeschützten Motors
- Der vollständige Leitfaden zur richtigen Lagerung von Elektromotoren
- Gleichstrom- und Wechselstrommotor:Was ist der Unterschied?
- Die vielen Funktionen des Fertigungsauftragsmoduls
- Aufbau des Stücklistenmoduls
- RTC-Modul:Der absolute Leitfaden für ein einfaches Projekt