


Arduino Rotary Encoder – Eine Richtlinie für die Verwendung von Drehgebern mit Arduino
Arduino Rotary Encoder ist aufgrund seiner soliden Bauweise und feinen digitalen Steuerung in CNC-Maschinen, Robotik und sogar Druckern nützlich.
Wenn Sie an einem Arduino-Drehgeberprojekt arbeiten und Hilfe benötigen, sind Sie hier richtig.
Der heutige Artikel befasst sich mit dem Drehgeber, seiner Konfiguration, Typen, Funktionsweise, Beispielen und Anwendungen.
Was ist ein Drehgeber?
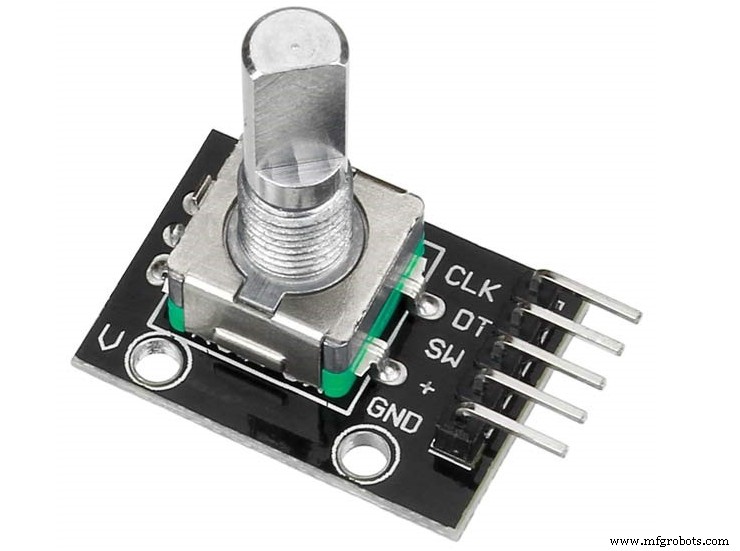
Abb. 1:Ein Drehgeber
Es ist ein elektromechanischer Positionssensor, der die Winkelposition oder Bewegung einer Welle oder Achse bestimmt.
Anschließend wandelt er die Winkelpositionsdaten in digitale oder analoge Ausgangssignale um.
Drehgeber-Pinbelegung
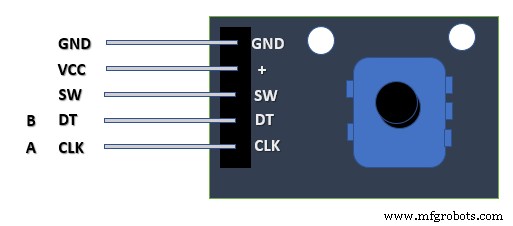
Abb. 2:Drehgeber-Pinbelegung
- VCC- Versorgungsspannung von 3,3 oder 5V
- GND- Masse
- SW-Aktive niedrige Taste
- CLK (Ausgang A)- Ausgangsimpuls zur Bestimmung der Drehung in beide Richtungen
- DT (Ausgang B) – Läuft CLK um 90 Grad nach und bestimmt die Drehrichtung
Arten von Drehgebern
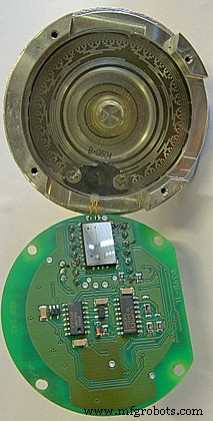
Abb. 3:Ein Gray-Code-Absolutdrehgeber mit 13 Spuren
Quelle:Wikimedia
Absolut-Encoder
Besteht aus einem Fotodetektor, einer Lichtquelle, einer Scheibe und einem Signalkonditionierer. Es behält die Positionsinformationen, wenn die Stromversorgung unterbrochen wird, und nimmt sie wieder auf, wenn sie wieder verfügbar ist.
Auch die Beziehung zwischen der physikalischen Position der gesteuerten Maschine und dem Encoderwert wird bei der Montage festgelegt. Sie müssen nicht zu einem Kalibrierungspunkt zurückkehren, um die Positionsgenauigkeit beizubehalten.
Inkremental-Encoder
Inkrementalgeber beginnen ihre Zählung beim Einschalten bei Null und melden Positionsänderungen sofort. Es behält jedoch nicht seine absolute Position. Sie müssen ein Überwachungssystem zu einem festen Referenzpunkt bewegen, um eine Positionsmessung zu starten.
Wie funktioniert der Drehgeber?
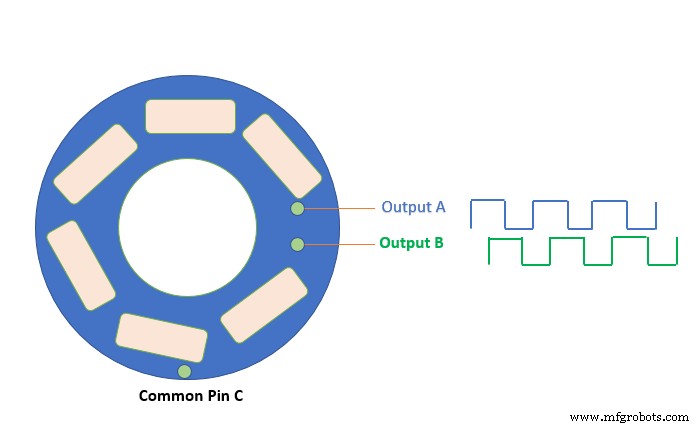
Bild 4:Funktionsweise eines Drehgebers
Es hat zwei Kontaktstifte, A und B, und einen gemeinsamen Erdungsstift, C. Wenn Sie die Knöpfe A und B kontaktieren, Stift C in der Reihenfolge der Drehung, erzeugen sie Signale. Außerdem sind die Vorzeichen zueinander um 90 Grad phasenverschoben (Quadraturcodierung).
Wenn Sie den Knopf im Uhrzeigersinn drehen, verbindet sich zuerst Pin A, gefolgt von B. Außerdem passiert das Gegenteil, wenn Sie den Knopf gegen den Uhrzeigersinn drehen.
Wir können dann verfolgen, wann sich die Stifte mit der Erde verbinden und von der Erde trennen, um die Drehrichtung zu bestimmen.
So wählen Sie einen Drehgeber aus?
Inkremental- oder Absolut-Encoder?
Wählen Sie einen mit einem besseren Kosten-Kapazitäts-Verhältnis oder einen, der während des Starts zum Ursprung zurückkehrt oder nicht. Wählen Sie außerdem je nach Geräuschtoleranz und Höchstgeschwindigkeit eine aus.
Wie hoch ist die Auflösung?
Wählen Sie eine, die der erforderlichen Präzision und den Kosten der Ausrüstung entspricht. Wählen Sie daher eine mit einer Auflösung von ½ bis ¼ der Genauigkeit der verwendeten Maschine.
Abmessungen
Berücksichtigen Sie die Art der zu verwendenden Drehwelle im Hinblick auf den Einbauraum. Zu Ihrer Information, die Wellen können hohl oder regelmäßig sein.
Zulässige Wellenbelastung
Berücksichtigen Sie bei der Auswahl eines Encoders, wie sich die Montagemethoden auf die Belastung und die mechanische Lebensdauer der Welle auswirken.
Maximal zulässige Geschwindigkeit
Wählen Sie eine unter Berücksichtigung der maximalen mechanischen Geschwindigkeit während des Gebrauchs aus.
Maximale Antworthäufigkeit
Wählen Sie eine basierend auf der maximalen Drehzahl der Gerätewelle bei gemeinsamer Verwendung aus.
Maximale Reaktionsfrequenz =(Umdrehungen (U/min)/60) * Auflösung.
Stellen Sie sicher, dass Sie einen auswählen, dessen Spezifikation einen gewissen Spielraum bezüglich des maximalen Werts der Ansprechfrequenz lässt.
Schutzgrad
Bitte wählen Sie ein Modell je nach Staub, Öl und Wasser in seiner Arbeitsumgebung aus.
- Nur Staub:IP50
- Wasser oder Öl vorhanden:IP52 (f), IP64 (f)
- Öl vorhanden:Ölfeste auswählen
Startdrehmoment der Welle
Berücksichtigen Sie in diesem Fall das Anlaufdrehmoment.
Ausgangsschaltungstyp
Berücksichtigen Sie hier die Signalfrequenz, die Übertragungsentfernung, das Rauschen und das Verbindungsgerät.
Vor- und Nachteile von Drehgebern
Abb. 5:Schrittmotor und mechanisches Teil der Zahnriemenscheibe für 3D-Drucker und CNC-Maschinen
Vorteile
- Hohe Auflösung
- Kostengünstiges Feedback
- Hohe Genauigkeit und Zuverlässigkeit
- Kompakt
- Kombiniert digitale und optische Technologie
Nachteile
- Funk- und Magnetsignale stören magnetische Encoder
- Direktes Licht stört optische Encoder
- Wird durch Öl, Schmutz und Staub beeinträchtigt
Drehgeber-Arduino-Beispiel
Einfaches Beispiel
Sie benötigen ein Arduino-Board, ein LCD, ein Potentiometer, Verbindungskabel und ein Steckbrett. Schließen Sie wie unten gezeigt an.
Verbinden Sie den +V-Pin des Moduls mit dem 5V-Pin von Arduino und erden Sie Ihr Setup. Als nächstes verbinden Sie die CLK- und DT-Pins mit den digitalen Pins 2 bzw. 3.
Steuerung eines Schrittmotors mit einem Drehgeber
Sie benötigen ein Arduino-Board, einen Schrittmotor und eine Treiberplatine, einen Drehgeber und ein Steckbrett.
Verbinden Sie den Encoder GND mit Arduino GND und den + mit Arduino 5V Pin. Verbinden Sie außerdem DT mit dem analogen Arduino-Pin 5 und CLK mit dem analogen Arduino-Pin 4.
Servomotor mit Drehgeber steuern
Drehgeber sind entscheidend in Projekten, die eine genaue Position von Objekten erfordern, wie z. B. dem Arm eines Roboters.
Erden Sie zur Verwendung das braun/schwarze Kabel des Servomotors. Schließen Sie auch das rote Kabel des Servomotors an eine 5-V-Quelle an. Schließlich das orange/gelbe Kabel mit PWM-aktiviertem Pin 9.
Schlussfolgerung
Wie wir gesehen haben, können Sie für viele Ihrer Projekte einen Drehgeber mit Arduino verwenden. Sie sind einfach zu bedienen, vielseitig und günstig in der Anschaffung. Wenn Sie Unterstützung bei Ihrem Projekt benötigen oder wenn Sie einige Graubereiche haben, die geklärt werden müssen, wenden Sie sich bitte an uns.
Industrietechnik
- Kommunikationsprotokolle:Überprüfung der Optionen für Encoder-Anwendungen
- LCD-Panel mit Arduino für Flugsimulator
- Schalter/LED-Panel mit Arduino für FS2020
- 6 einfache Tipps zur Encoderreparatur und Fehlerbehebung
- Dimmen von Lichtern mit PWM über Drucktasten
- Anwesenheitssystem mit Arduino und RFID mit Python
- DIY Einfaches Messrad mit Drehgeber
- Verwenden des tragbaren Pulssensors MAX30100 mit Arduino
- Verwendung von perforiertem Blech zur Belüftung
- Drehgeber verbessern die absolute Positionsgenauigkeit des Roboters