


DIY Einfaches Messrad mit Drehgeber
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
 |
|
Apps und Onlinedienste
| |
|
Über dieses Projekt
Ein Messrad ist ein Konstruktionsmesswerkzeug. Das Rad dreht sich und mit der grundlegenden Rotationskinematik (s=rθ) können Sie den Abstand zwischen zwei Punkten bestimmen.
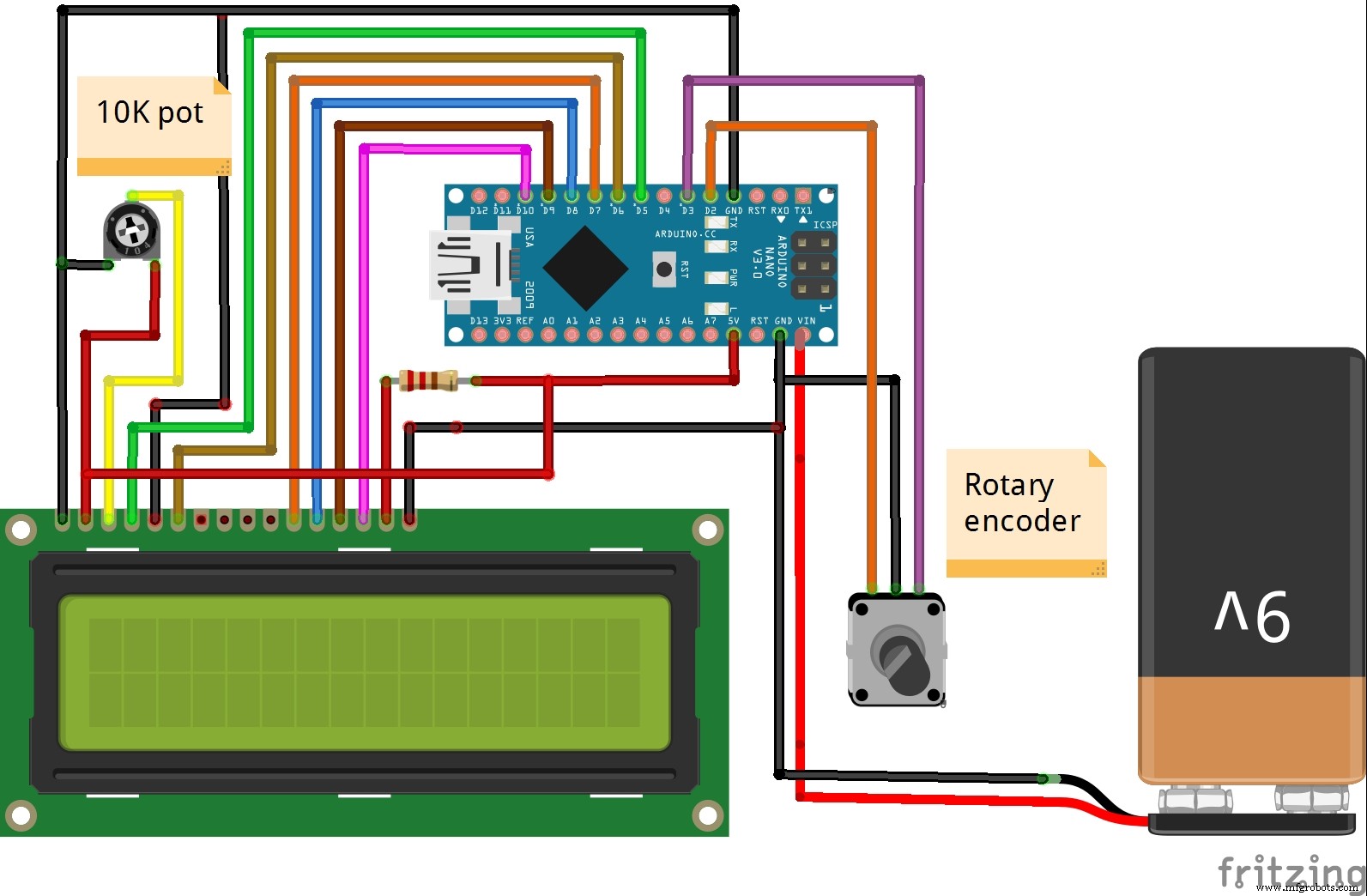
Das folgende Video zeigt ein reduziertes Funktionsmodell eines solchen Geräts, das aus mehreren Komponenten besteht:
- Arduino Nano
- Drehgeber
- 16x2 LCD-Display
- 10k Topf.
- 220 Ohm Widerstand

Das Funktionsprinzip ist wie folgt:
Der Drehgeber misst die Anzahl der Umdrehungen, aber wir müssen die Umdrehung in die zurückgelegte Strecke umrechnen. Die zurückgelegte Strecke hängt vom Durchmesser des Rades ab. Der Drehgeber bewegt sich N Schritte in einer vollständigen Umdrehung (360 Grad). Die Schritte pro Umdrehung hängen vom Drehgeber ab, der von 8 auf 48 geändert werden kann. Angenommen, N sind die Schritte pro Umdrehung und R der Radius des Rads.
Zurückgelegte Strecke in einer Umdrehung ist =2xπxR
Zurückgelegte Strecke in einem Schritt ist =2xπxR/N
Dazu habe ich einen ganz einfachen Code geschrieben und die zurückgelegte Strecke wird auf dem LCD-Bildschirm in Zentimetern angezeigt. Abhängig von den im Code verwendeten Komponenten ändern wir die Werte von "N" und "R".
In meinem Fall wird das Rad auf einem 3D-Drucker hergestellt und die gesamte Baugruppe wird auf einer Aluminiumstange montiert, wie im Video zu sehen.
Code
- Code
CodeC/C++
/* Messrad * * von Mirko Pavleski, * * https://www.youtube.com/channel/UCHLzc76TZel_vCTy0Znvqyw */#includeLiquidCrystal lcd(5, 6, 7, 8, 9, 10);int pin1 =2;int pin2 =3;int Pos =0; int State;int LastState; const float pi =3,14;const float R =3,25;const int N =40;float Abstand =0;void setup() { pinMode (pin1 ,INPUT_PULLUP); pinMode (pin2 ,INPUT_PULLUP); lcd.begin(16, 2); lcd.print("MESSRAD"); LastState =digitalRead (pin1); aufrechtzuerhalten. Void Schleife () { Zustand =digitalRead (pin1); if (State !=LastState){ if (digitalRead(pin2) !=State) { Pos ++; } sonst { Pos --; } } Abstand =((2*pi*R)/N) * Pos; lcd.setCursor(0, 1); lcd.print (Abstand); lcd.setCursor(5, 1); lcd.print("cm"); LastState =Zustand; }
Schaltpläne
Herstellungsprozess
- DIY einfachste IV9 Numitron-Uhr mit Arduino
- Arduino-Gyroskop-Spiel mit MPU-6050
- Einfacher Hindernissensor mit Arduino
- DIY Voltmeter mit Arduino und einem Nokia 5110 Display
- MobBob:DIY-Arduino-Roboter, der von einem Android-Smartphone gesteuert wird
- IoT-Messgerät mit Arduino, Yaler und IFTTT
- Einfacher DIY-Frequenzmesser bis zu 6,5 MHz
- DIY-Luftqualitätsmonitor mit Sharp GP2Y1010AU0F-Sensor
- Handheld-Geigerzähler mit Arduino Nano
- Einfacher Wecker mit DS1302 RTC