


Wi-Servo:Wi-Fi browsergesteuerte Servomotoren
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Dieses Projekt zeigt, wie man einige Servomotoren in einem Wi-Fi-Netzwerk mit einem gewöhnlichen Internetbrowser (z. B. Firefox) fernsteuert. Dies kann in verschiedenen Anwendungen verwendet werden:Spielzeug, Roboter, Drohnen, Kameraschwenks/-neigung usw.
Die Motoren wurden an einen Arduino Uno angeschlossen, der das Wi-Fi-Netzwerk über ein ESP-8266-Modul verbindet. Die Bedienoberfläche wurde mit HTML und jQuery entworfen.
Als Inspiration diente Miguels Tutorial (http://allaboutee.com/2015/01/02/esp8266-arduino-led-control-from-webpage/), das zeigt, wie man LEDs mit ESP-8266 ein- und ausschaltet posten.
Die hier gezeigte Technik kommt in einem meiner Projekte zum Einsatz:"Robô da Alegria". Weitere Informationen hierzu finden Sie unter einem der folgenden Links:
https://hackaday.io/project/12873-rob-da-alegria-joy-robot
https://www.facebook.com/robodaalegria/
https://github.com/ferauche/RoboAlegria
Schritt 1:Elektronik

Für dieses Projekt benötigen Sie die folgenden Komponenten:
- Arduino Uno (kaufen)
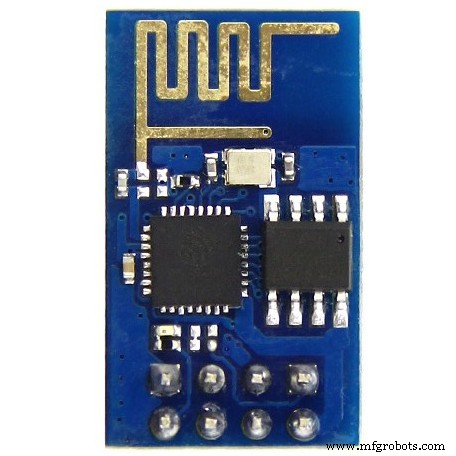
- ESP8266 (kaufen)
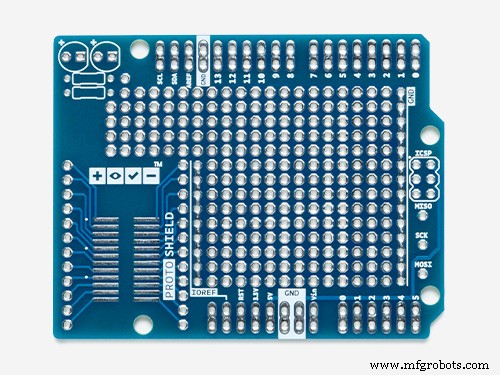
- Protoshield (für eine kompaktere Version) oder ein gewöhnliches Steckbrett (kaufen)
- 10 kOhm Widerstand (x3)
- Einige Überbrückungsdrähte
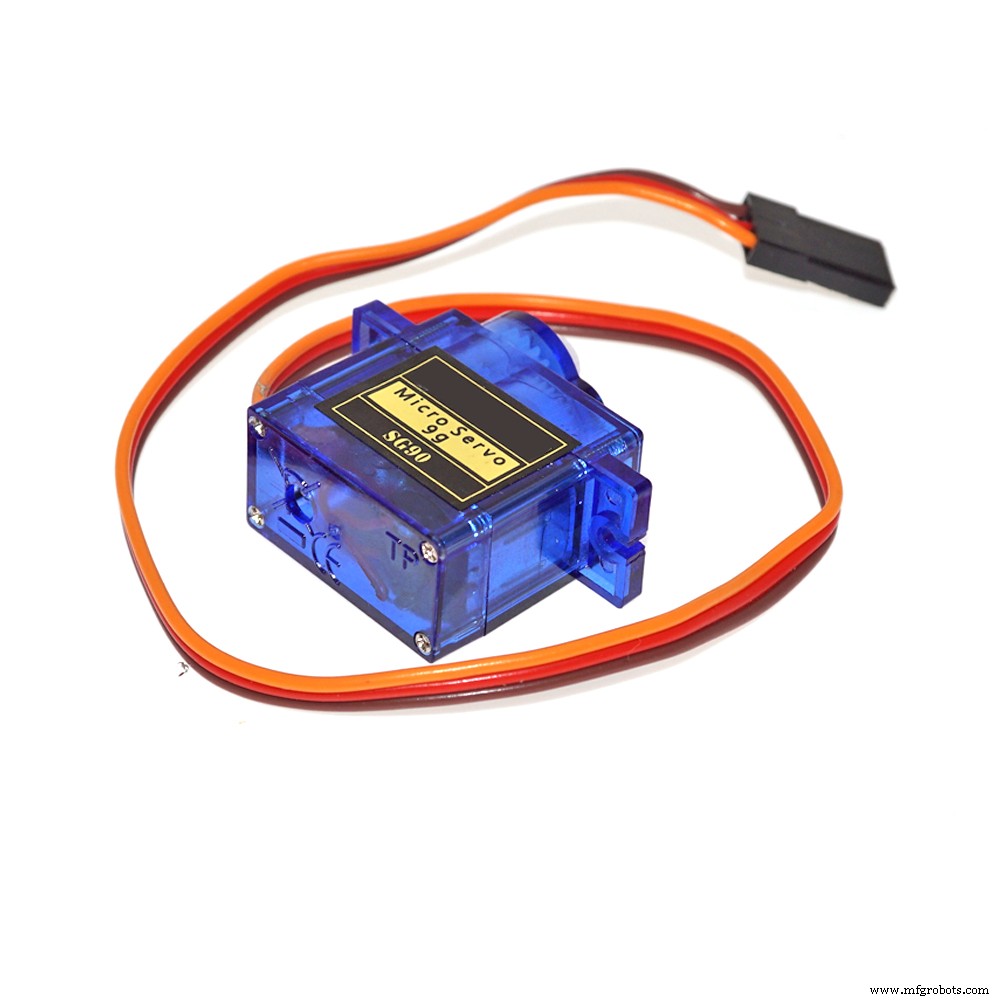
- SG90 Servomotor (x2) (kaufen)
- Ein Computer (zum Kompilieren und Hochladen von Arduino-Code)
Sie benötigen keine speziellen Werkzeuge für die Montage dieses Projekts. Alle Komponenten finden Sie online in Ihrem bevorzugten E-Commerce-Shop. Die Schaltung wird über den USB-Port (verbunden mit einem Computer oder einem normalen Telefonladegerät) mit Strom versorgt, Sie können jedoch auch ein externes DC-Netzteil oder eine Batterie hinzufügen, die an die Arduino-Strombuchse angeschlossen ist.
Schritt 2:Montage
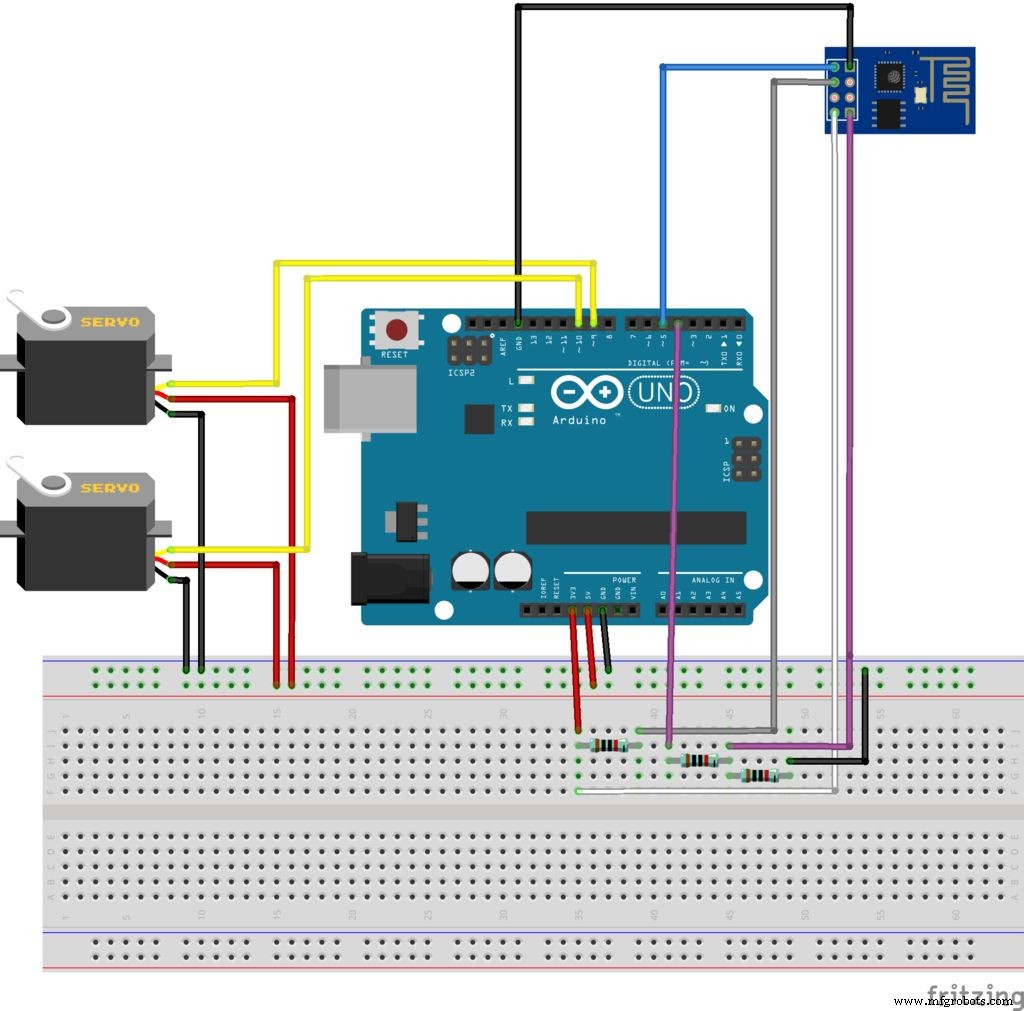
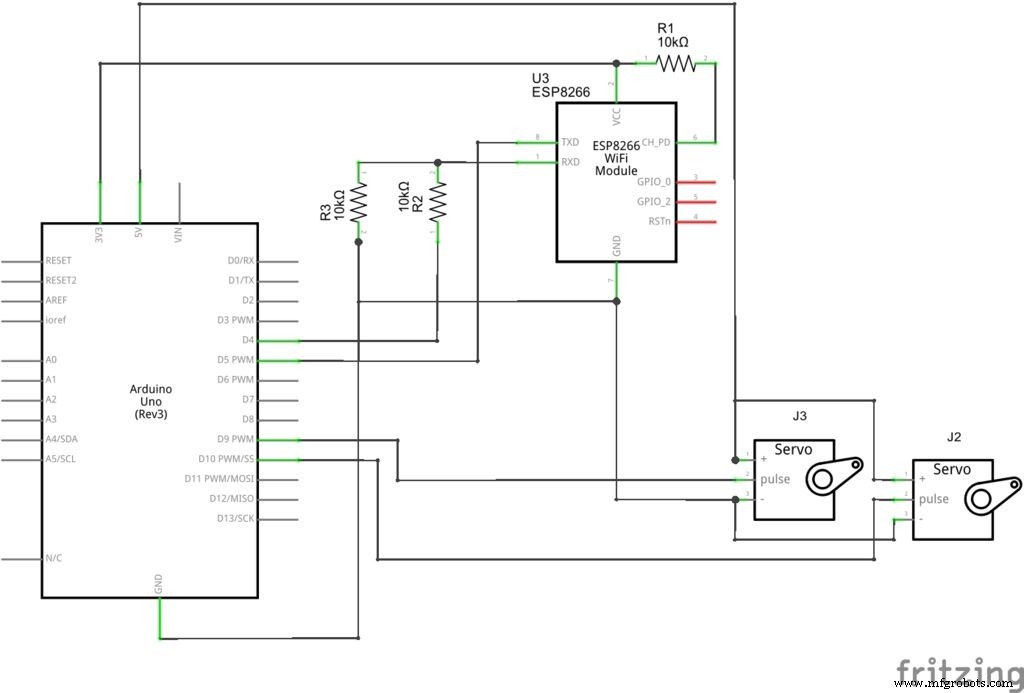
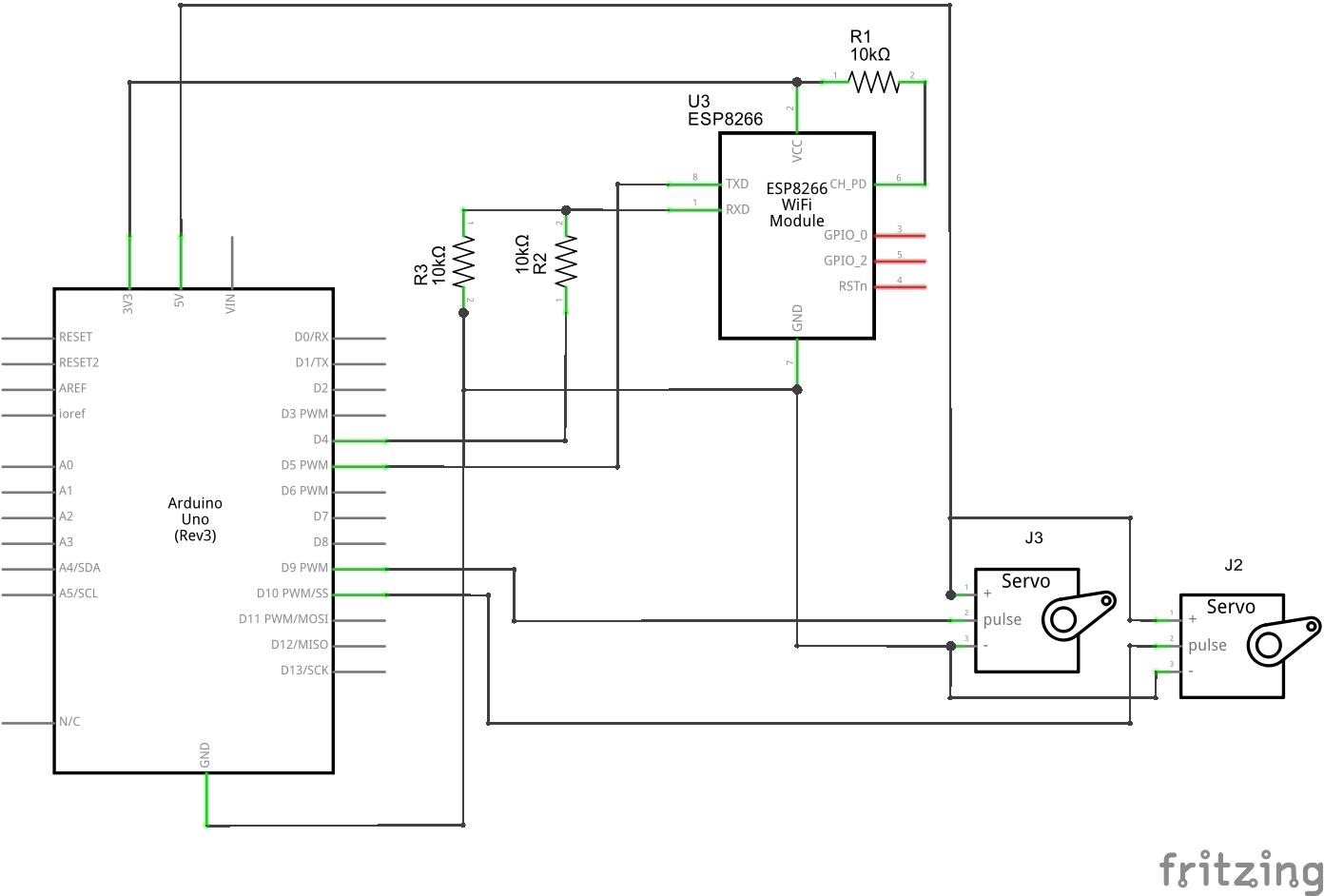
Verbinden Sie alle Komponenten gemäß dem Schaltplan. Sie benötigen einige Überbrückungsdrähte, um das ESP-8266-Modul und die Servomotoren zu verbinden. Sie können ein Proto-Shield (für eine kompaktere Schaltung), ein gewöhnliches Steckbrett verwenden oder Ihr eigenes Arduino-Shield entwerfen.
Schließen Sie das USB-Kabel an das Arduino Uno-Board an und fahren Sie mit dem nächsten Schritt fort.
Schritt 3:Arduino-Code
Installieren Sie die neueste Arduino-IDE. In diesem Projekt wurde die servo.h Bibliothek zur Steuerung der Servos verwendet. Um Konflikte zwischen dem Wi-Fi-Modul und dem USB-Port des Computers während des Hochladens des Codes zu vermeiden, softserial Bibliothek genutzt wurde. Für die Kommunikation mit dem ESP-8266-Modul war keine zusätzliche Bibliothek erforderlich. Bitte überprüfen Sie die Baudrate Ihres ESP8266 und stellen Sie diese im Code richtig ein.
Einige Servomotoren beginnen zu zittern und machen seltsame Geräusche, wenn ihre Position nahe an den Grenzen (0 und 180 Grad) liegt. Um dies zu vermeiden, wurde der Winkel sowohl im Arduino-Code als auch in der Steuerschnittstelle (später) zwischen 10 und 170 Grad begrenzt.
Leider servo.h Bibliothek und softserial.h Bibliothek verwenden den gleichen Timer des Mikrocontrollers. Dies kann zu Jitter in den Servos führen, wenn das Arduino mit dem ESP-8266 kommuniziert. Um das zu vermeiden, werden die Servos nach jedem Befehl vom Arduino getrennt. Sie können das Modul auch an die standardmäßigen seriellen Pins anschließen. Denken Sie in diesem Fall daran, das Modul vor jedem Upload zu trennen.
Arduino-Code herunterladen (wi-servo.ino ) und ersetzen Sie XXXXX durch die SSID Ihres WLAN-Routers und YYYYY durch das Router-Passwort. Verbinden Sie das Arduino-Board mit dem USB-Port Ihres Computers und laden Sie den Code hoch.
Schritt 4:Schnittstelle
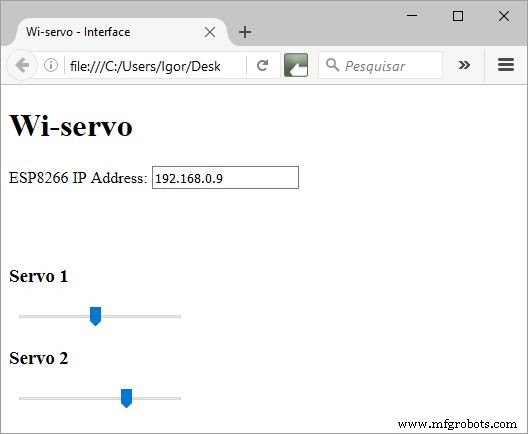
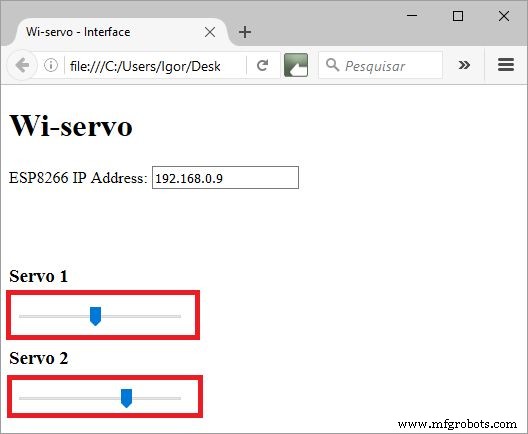
Für die Ansteuerung der Servomotoren wurde eine HTML-Schnittstelle konzipiert. In diesem Beispiel wurden zwei Servos verwendet, aber dem Arduino Uno können weitere hinzugefügt werden (ich habe bis zu vier Motoren getestet).
Ein Textfeldformular wird verwendet, um die IP-Adresse des ESP-Moduls einzugeben. Wi-servo.html herunterladen undjquery.js Dateien und speichern Sie beide im selben Ordner.
Schritt 5:Verwendung
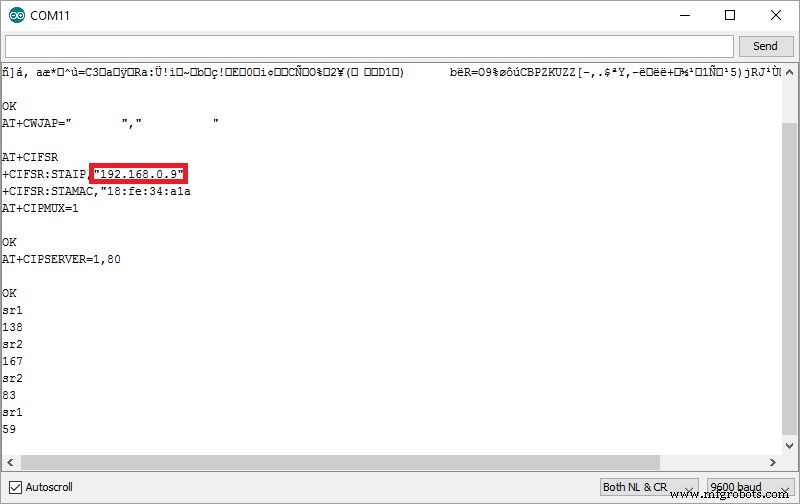
Wenn das Arduino neu gestartet wird, versucht es automatisch, Ihr Wi-Fi-Netzwerk zu verbinden. Verwenden Sie den Serial Monitor, um zu überprüfen, ob die Verbindung erfolgreich war, und um herauszufinden, welche IP Ihrem ESP-8266 von Ihrem Router zugewiesen wurde.
Öffnen Sie die HTML-Datei in einem Internetbrowser (Firefox).
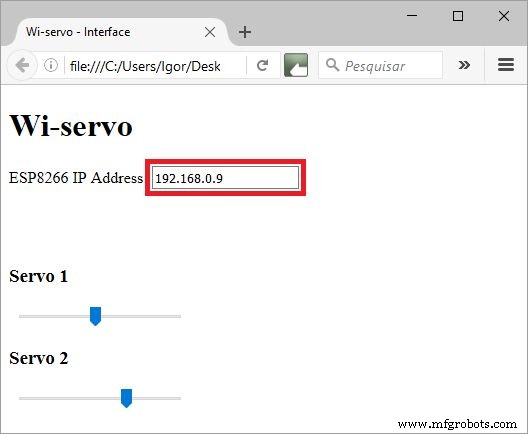
Geben Sie die IP-Adresse Ihres ESP-8266 in das Textfeld ein und Sie können loslegen. Wählen Sie mit den Schiebereglern den gewünschten Winkel für jedes Servo aus. Der Browser sendet automatisch eine Anfrage an das Arduino, wenn Sie die Maustaste loslassen und jedes Servo bewegen.
Code
Github
https://github.com/ferauche/RoboAlegriahttps://github.com/ferauche/RoboAlegriaSchaltpläne
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- WebServerBlink mit Arduino Uno WiFi
- Joystick-gesteuertes RC-Auto
- Einfacher UNO-Rechner
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Sprachgesteuerter Roboter
- Beharrlichkeit der Vision
- Arduino-gesteuerter Klavierroboter:PiBot
- Berührungsgesteuertes Licht mit Arduino
- Arduino-gesteuertes USB-Trackpad