


4-Rad-Roboter mit Arduino-Steuerung mit Dabble
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 |
Apps und Onlinedienste
 |
| |||
|
Über dieses Projekt
Ein weiteres Projekt, eine weitere ausgefallene Geschenkidee! Wir präsentieren Ihnen den von Dabble gesteuerten 4-Rad-Roboter - einen einfach zu bauenden und leicht zu steuernden Roboter, der über Bluetooth mit Dabble gesteuert werden kann, einer von uns entwickelten mobilen Anwendung. Alles, was Sie brauchen, um Ihren Roboter herzustellen, ist ein Arduino Uno-Board, ein Chassis, Räder, Motorwellen und anderes Zubehör und Werkzeuge. Um es zu steuern, müssen Sie Dabble von Google Play installieren und mit Bluetooth koppeln. und dein Roboter ist einsatzbereit!
Gibt es einen besseren Weg, das Jahr mit dem gleichen DIY-Geist zu beenden, mit dem es begonnen hat, oder? Also, worauf wartest Du!
Fangen wir also an!
Schritt 1:Dinge, die Sie brauchen
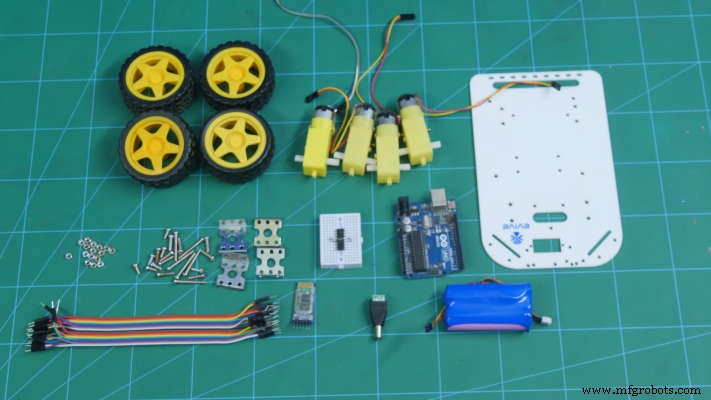
- Arduino Uno-Board
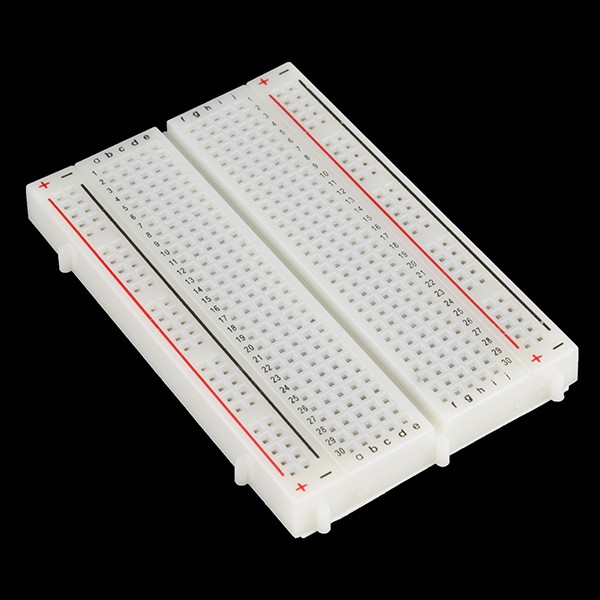
- Breadboard
- Fahrwerk
- Motorhalterungen
- DC-Motoren
- Rad
- Motorfahrer
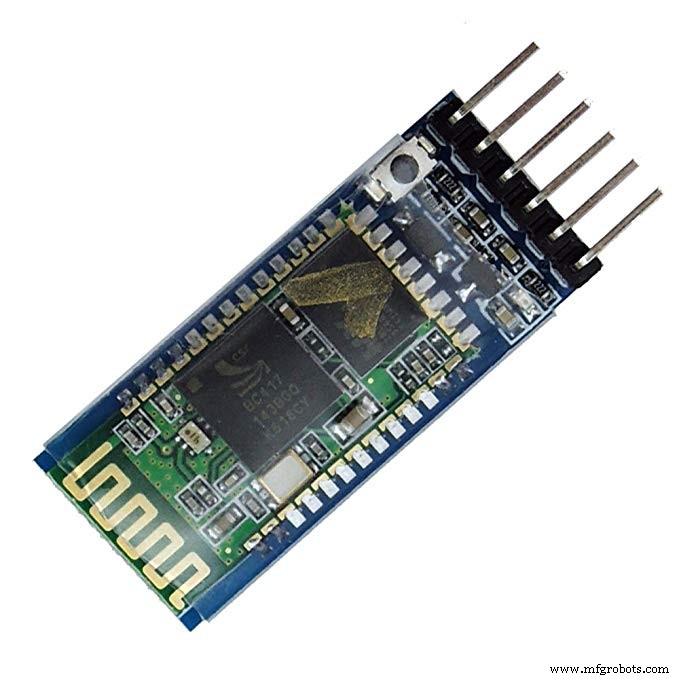
- Bluetooth-Modul HC05
- DC-Klemmenblock
- Batterie
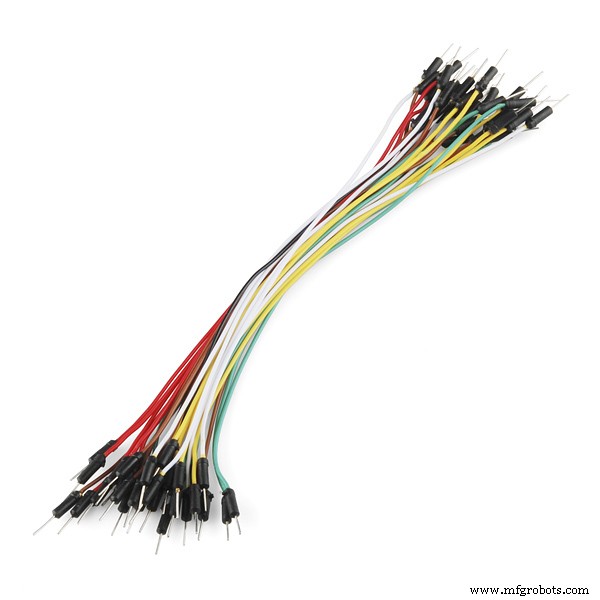
- Überbrückungskabel
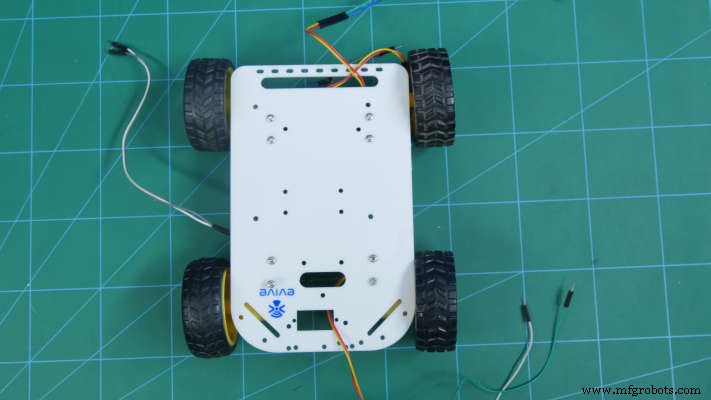
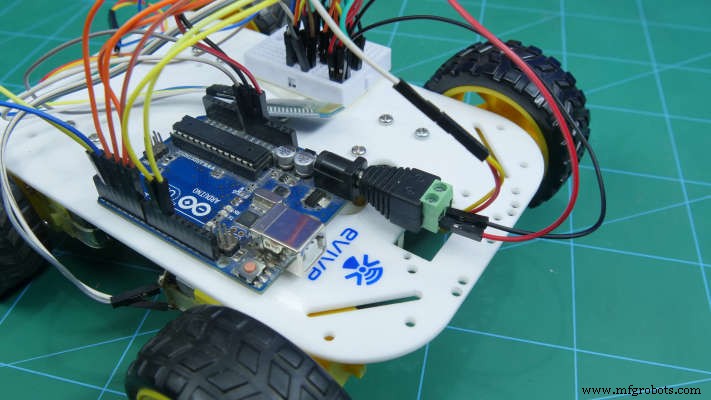
Schritt 2:Herstellung des Körpers
Zuerst beginnen wir mit der Herstellung des Körpers des 4-Rad-Roboters.
Nehmen Sie das Chassis und drehen Sie es auf den Kopf.

Auf diesem Chassis montieren Sie 4 Motorhalterungen mit M3-Schrauben und Muttern.
Befestigen Sie die DC-Motoren und befestigen Sie sie an den Motorhalterungen mit M2-Muttern und -Schrauben.
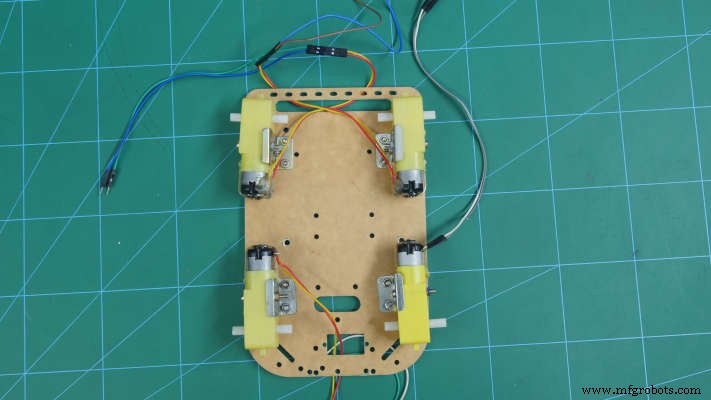
Bringen Sie Räder an jeder Welle des Gleichstrommotors an.

Drehe die Baugruppe um, so entsteht dein Körper.
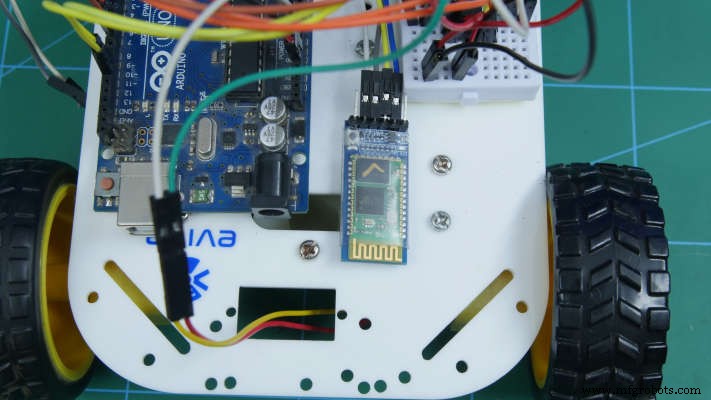
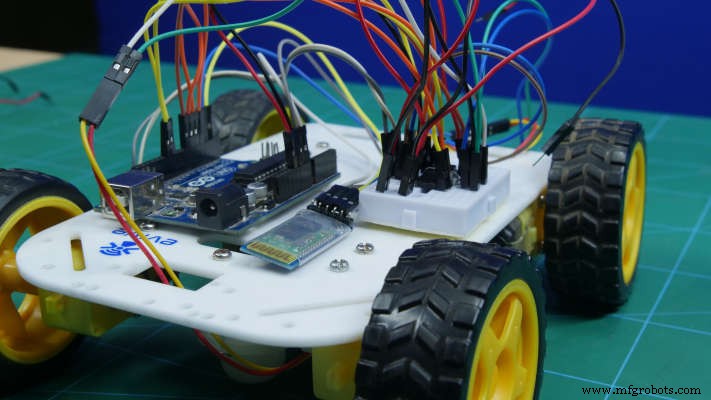
Schritt 3:Gehirn hinzufügen
Der Mikrocontroller, den wir verwenden werden, ist Arduino Uno.

Wir werden alle Verbindungen darauf herstellen, aber wir werden auch ein Steckbrett verwenden, um die Verbindungen herzustellen.
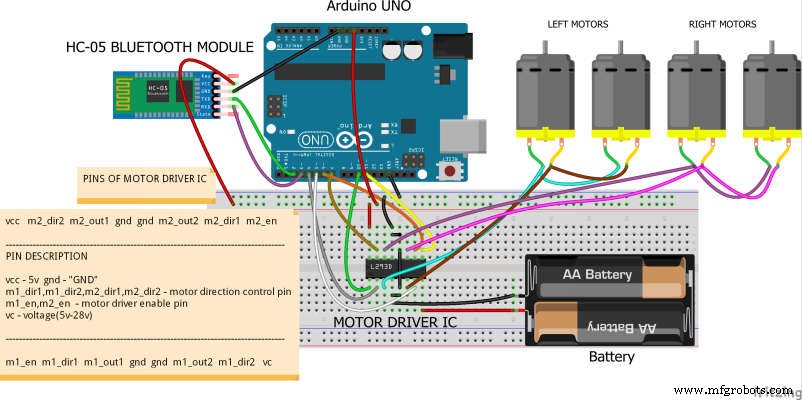
Schritt 4:Herstellen von Verbindungen und Verwenden des Motortreibers
Stellen Sie die Verbindung wie in der folgenden Abbildung gezeigt her.
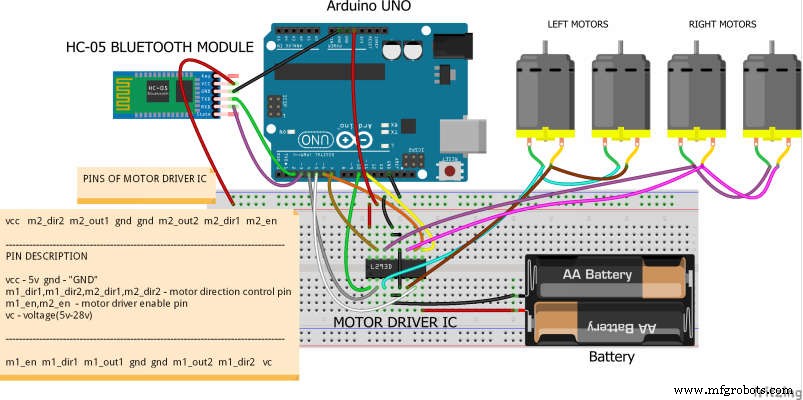
Wir werden die Motortreiber verwenden, da Arduino Uno nicht genügend Leistung bietet, um 4 Motoren zu betreiben. So werden wir den Motortreiber hinzufügen, wir werden in der Lage sein, dem Roboter die benötigte Energie zu geben.
Die linken beiden Motoren sind parallel geschaltet. Ebenso sind die beiden rechten Motoren zu parallel geschaltet. Die Verbindungen werden wie folgt hergestellt:
- Pins aktivieren – Digital Pin 10 und 11
- VCC – Arduino 5V
- m1_dir1, m1_dir2, m2_dir1, m2_dir2 – Digitale Pins 4, 5, 6 und 7
- VC – Externer Akku
- GND – GND von Arduino und BatteryStellen Sie sicher, dass wir alle GND-Drähte miteinander verbinden.
Schritt 5:Smartphone verbinden
Wir müssen ein Modul hinzufügen, das die Verbindung zwischen Ihrem Roboter und der Dabble-App auf dem Smartphone herstellt.
Wir nehmen das Bluetooth HC05 Modul. Schließen Sie es wie in der Anschlussabbildung gezeigt an.
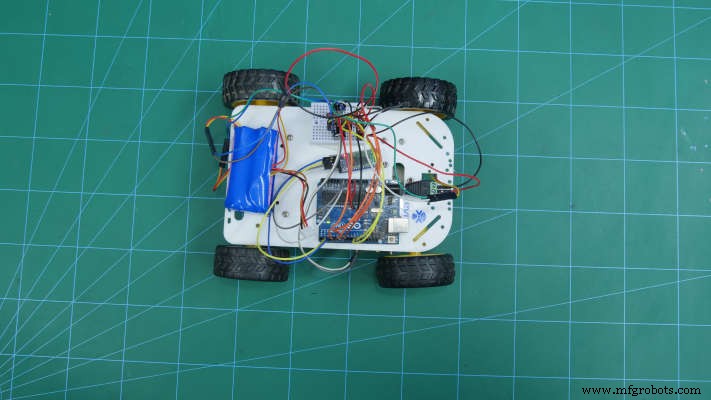
Schritt 6:Hinzufügen des Akkus
Wir müssen unserem Roboter eine zusätzliche Stromquelle hinzufügen. Um Arduino Uno mit der Batterie zu verbinden, verwenden wir außerdem einen DC-Klemmenblock oder eine DC-Buchse.
Schritt 7:Arduino-Code
Laden Sie den folgenden Code hoch:
robot.ino
Schritt 8:Arbeiten
Wir können unseren Roboter mithilfe von Dabble ganz einfach mit unserem Smartphone verbinden.
Bevor Sie mit einem der Module arbeiten, müssen Sie das Bluetooth, an dem Sie arbeiten, verbinden.
In der App stehen viele Module für andere Funktionalitäten zur Verfügung.
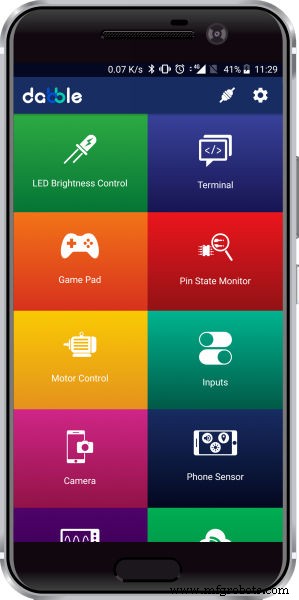
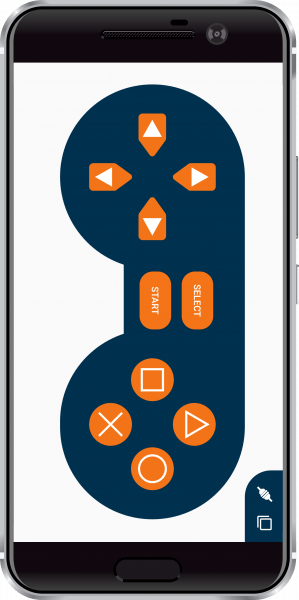
Heute arbeiten wir mit dem Gamepad-Modul.
Und wir werden den linken Tastensatz verwenden:
- Nach oben – Vorwärts
- Nach unten – Nach hinten bewegen
- Links – Links abbiegen
- Rechts – rechts abbiegen
Schritt 9:Fazit
Damit ist dein DIYDabble-gesteuerter 4-Rad-Roboter einsatzbereit!
Psst! Nur damit Sie es wissen, Dabble kann viel mehr als nur Roboter drahtlos steuern. Sie können hier mehr darüber erfahren!
Code
- robot.ino
- lebendige Bibliothek
robot.inoArduino
/* * * Dieses Projekt demonstriert die Steuerung eines Arduino-4-Rad-Roboters mit der Dabble-App * Wir werden das Gamepad-Modul im digitalen Modus verwenden * Weitere Informationen zum Gamepad finden Sie unter https://thestempedia.com/docs/dabble/game- Pad-Modul / * * In diesem Projekt werden wir das HC-05 Bluetooth-Modul verwenden * für Arduino "UNO" Bluetooth-Modul-Buadrate unter 38400 verwenden * * Verbindung des Bluetooth-Moduls mit Arduino * * HC-05 Bluetooth-Modul ----> arduino "UNO" * * Tx ----> 2 * Rx ----> 3 * * Geschrieben von Punit chotaliya, STEMpedia * am 16. Januar 2019 * *///Um das GamePad-Modul in das Arduino-Programm aufzunehmen, Sie müssen //den folgenden Header einschließen:#define CUSTOM_SETTINGS#define INCLUDE_GAMEPAD_MODULE//include Dabble-App-Bibliothek #include#define motor1_en 10 // Motor 1 Enable Pin #define Motor2_en 11 // Motor 2 Enable Pin # define motor1_dir1 4 // Motor 1 Input1 (InputA) #define motor1_dir2 5 // Motor 1 Input2 (InputA)#define motor2_dir1 6 // Motor 2 Input1 (InputB)#define mo tor2_dir2 7 // Motor 2 input2 (InputB)void setup () { // Geben Sie Ihren Setup-Code hier ein, um ihn einmal auszuführen:Serial.begin (9600); // serielle Kommunikation mit 9600 Baudrate starten Dabble.begin (38400); // Geben Sie die Baudrate Ihres Bluetooth-Moduls ein // HINWEIS:Verwenden Sie für Arduino "UNO" die Bluetooth-Modul-Baudrate unter 38400 für (unsigned int i =4; i <8; i ++) { pinMode (i, OUTPUT); // Eingangspins von motor1 und motor2 als Ausgangspin deklarieren} pinMode(motor1_en,OUTPUT); // Aktivierungspins des Motors als Ausgang deklarieren pinMode (motor2_en, OUTPUT); }void loop() { // füge deinen Hauptcode hier ein, um ihn wiederholt auszuführen:Dabble.processInput(); // Um die Daten zu aktualisieren, die das Arduino UNO von der mobilen App erhalten hat, müssen Sie die folgende Codezeile verwenden if (GamePad.isUpPressed()) // Wenn UP im Gamepad gedrückt wird, dann den Roboter vorwärts bewegen { Serial.print ("HOCH"); nach vorne(); aufrechtzuerhalten. Sonst if (GamePad.isDownPressed()) // Wenn DOWN im Gamepad gedrückt wird, dann Roboter rückwärts bewegen { Serial.print ("DOWN"); rückwärts(); aufrechtzuerhalten. Sonst if (GamePad.isLeftPressed()) // wenn LINKS im Gamepad gedrückt wird, dann Roboter LINKS bewegen { Serial.print ("Left"); links(); aufrechtzuerhalten. Sonst if (GamePad.isRightPressed ()) // Wenn RECHTS im Gamepad gedrückt wird, dann Roboter RECHTS bewegen { Serial.print ( "Right"); Rechts(); aufrechtzuerhalten. Sonst // Stoppen Sie den Roboter { Serial.println ( "strop"); Halt(); aufrechtzuerhalten. aufrechtzuerhalten. Void forward () // Funktion für die Vorwärtsbewegung des Roboters { AnalogWrite (motor1_en, 255); analogWrite (motor2_en,255); digitalWrite (motor1_dir1,HIGH); digitalWrite (motor1_dir2,LOW); digitalWrite (motor2_dir1,HIGH); digitalWrite (motor2_dir2, LOW); aufrechtzuerhalten. Void rückwärts () // Funktion für die Rückwärtsbewegung des Roboters { AnalogWrite (motor1_en, 255); analogWrite (motor2_en,255); digitalWrite (motor1_dir1,LOW); digitalWrite (motor1_dir2, HOCH); digitalWrite (motor2_dir1,LOW); digitalWrite (motor2_dir2, HOCH); aufrechtzuerhalten. Void left () // Funktion für die linke Bewegung des Roboters { AnalogWrite (motor1_en, 255); analogWrite (motor2_en,255); digitalWrite (motor1_dir1,LOW); digitalWrite (motor1_dir2, HOCH); digitalWrite (motor2_dir1,HIGH); digitalWrite (motor2_dir2, LOW); aufrechtzuerhalten. Void right () // Funktion für die rechte Roboterbewegung { AnalogWrite (motor1_en, 255); analogWrite (motor2_en,255); digitalWrite (motor1_dir1,HIGH); digitalWrite (motor1_dir2,LOW); digitalWrite (motor2_dir1,LOW); digitalWrite (motor2_dir2, HOCH); aufrechtzuerhalten. Void Stop () // // Funktion für keine Bewegung { AnalogWrite (motor1_en, 0); analogWrite(motor2_en,0); digitalWrite (motor1_dir1,LOW); digitalWrite (motor1_dir2,LOW); digitalWrite (motor2_dir1,LOW); digitalWrite (motor2_dir2, LOW); }
evive-BibliothekC/C++
Keine Vorschau (nur Download).
Schaltpläne
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Bauen Sie Ihren internetgesteuerten Videostreaming-Roboter mit Arduino und Raspberry Pi
- WLAN-gesteuerter Roboter mit Raspberry Pi
- Dimmen von Lichtern mit PWM über Drucktasten
- Android-gesteuertes Spielzeug mit Raspberry Motor Shield
- Hindernisse vermeiden Roboter mit Servomotor
- Linienfolger-Roboter
- Nunchuk-gesteuerter Roboterarm (mit Arduino)
- Sprachgesteuerter Roboter
- MobBob:DIY-Arduino-Roboter, der von einem Android-Smartphone gesteuert wird