


Linienfolger-Roboter
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Lassen Sie uns einen vollständig autonomen Roboter mit Arduino- und IR-Sensoren bauen. Es kann einer schwarzen Linie auf einer weißen Fläche folgen. Sehen Sie sich das Video an, um mehr zu erfahren!
Verwendete Komponenten:
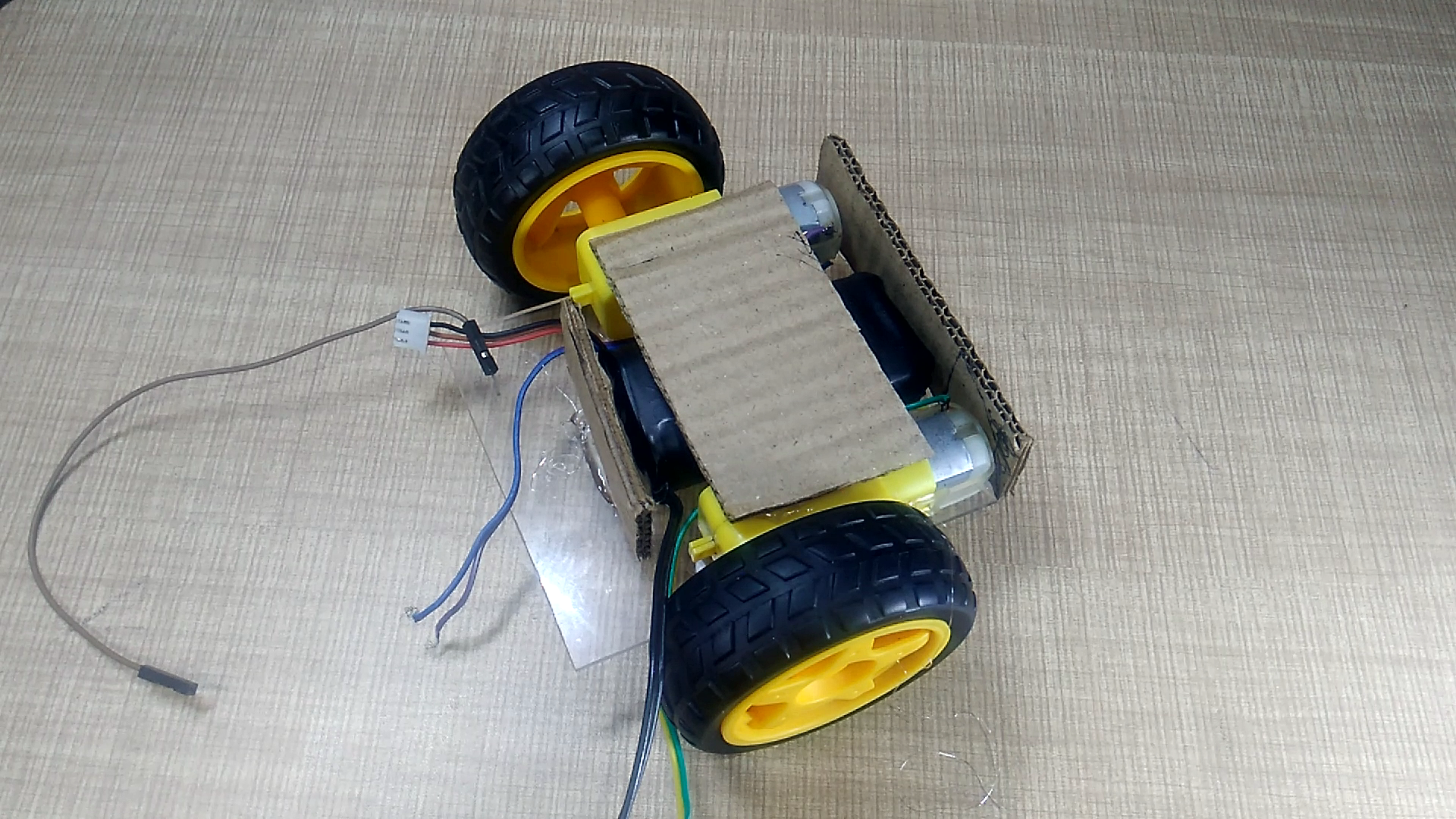
- Stück Karton/ Acrylglas
- Arduino Uno
- IR-Sensor
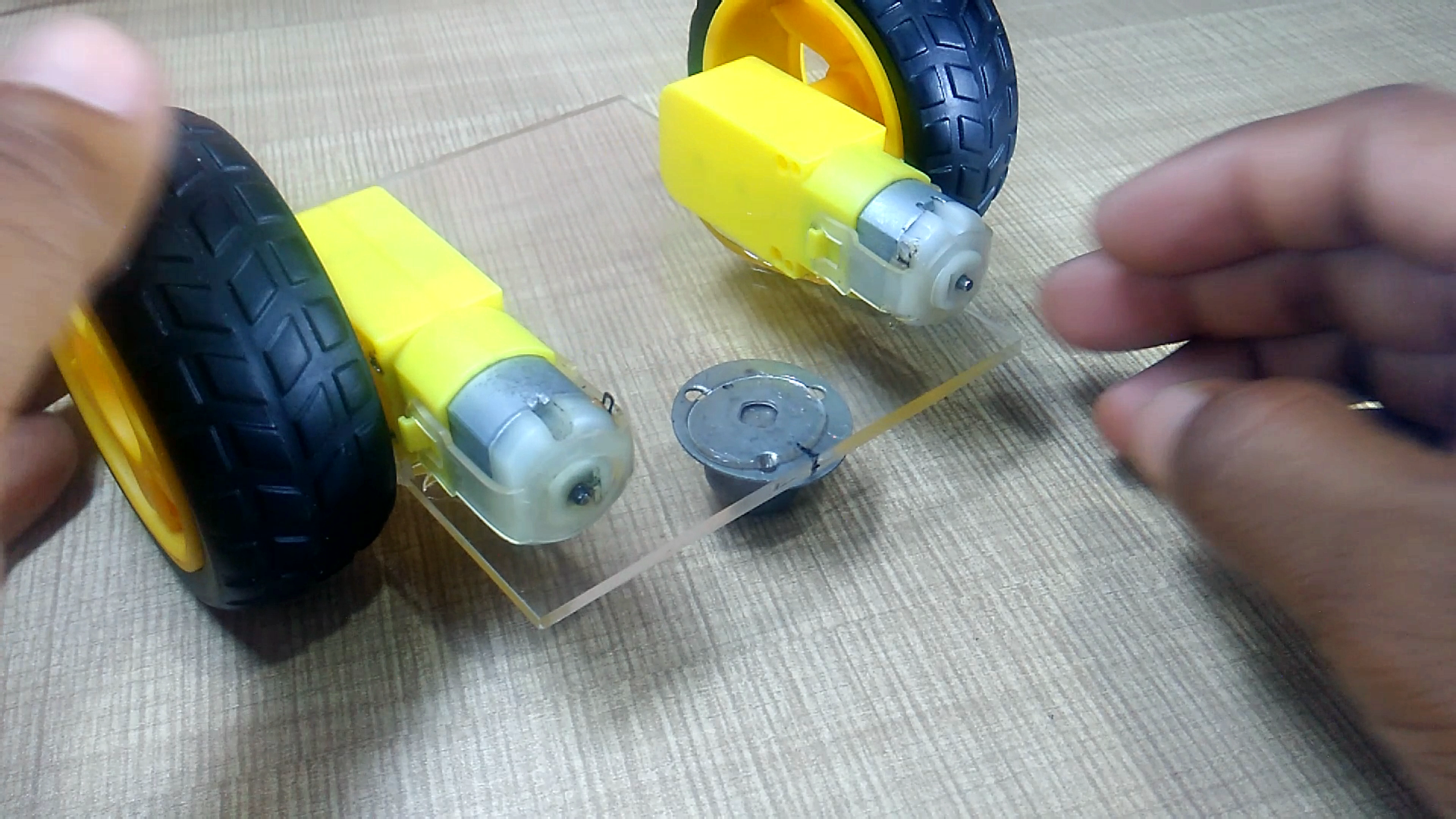
- BO-Motor
- Räder
- Lenkrad
- L293d-IC
- PCB
- Flexibler Draht
- Batterie
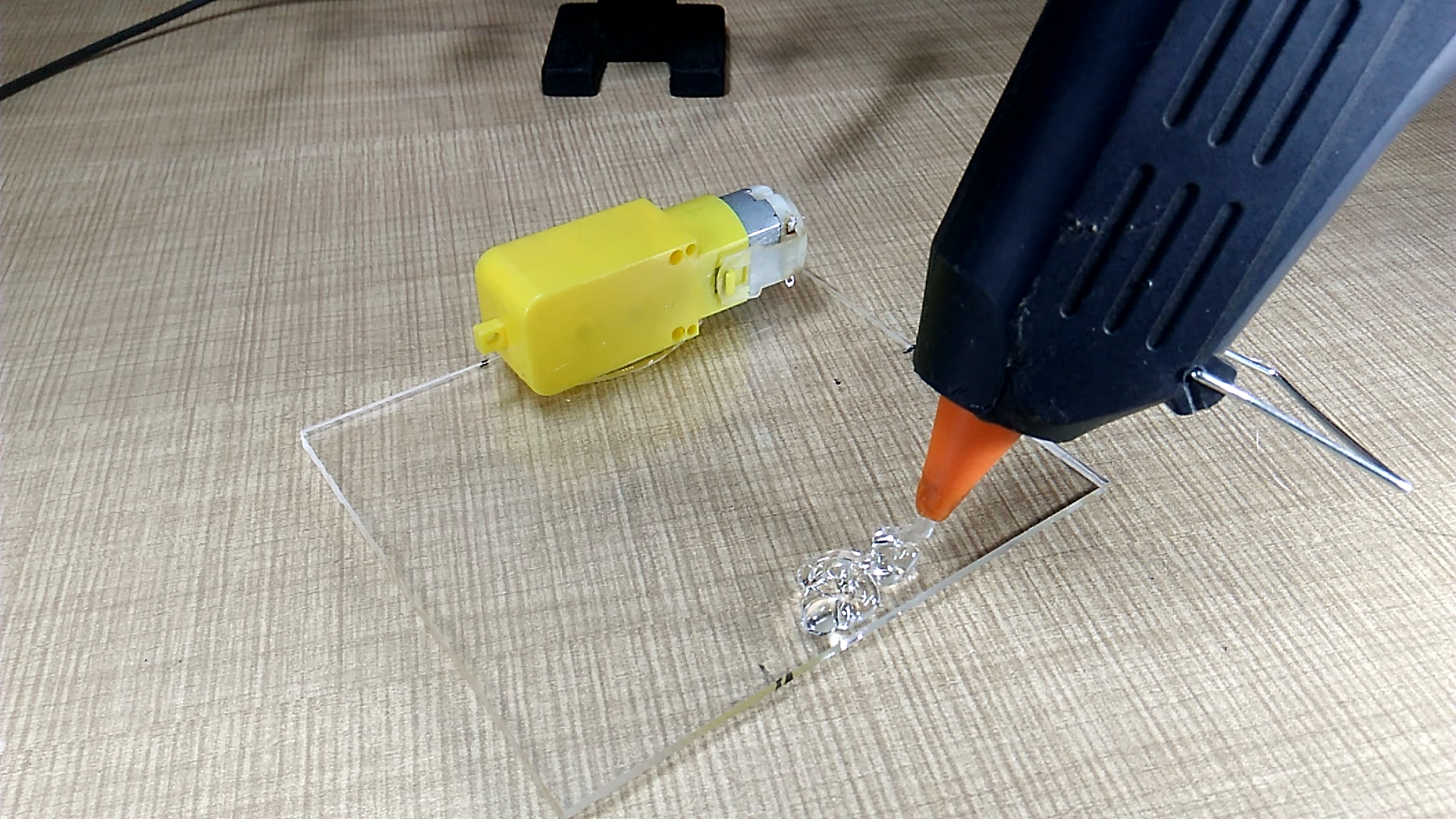
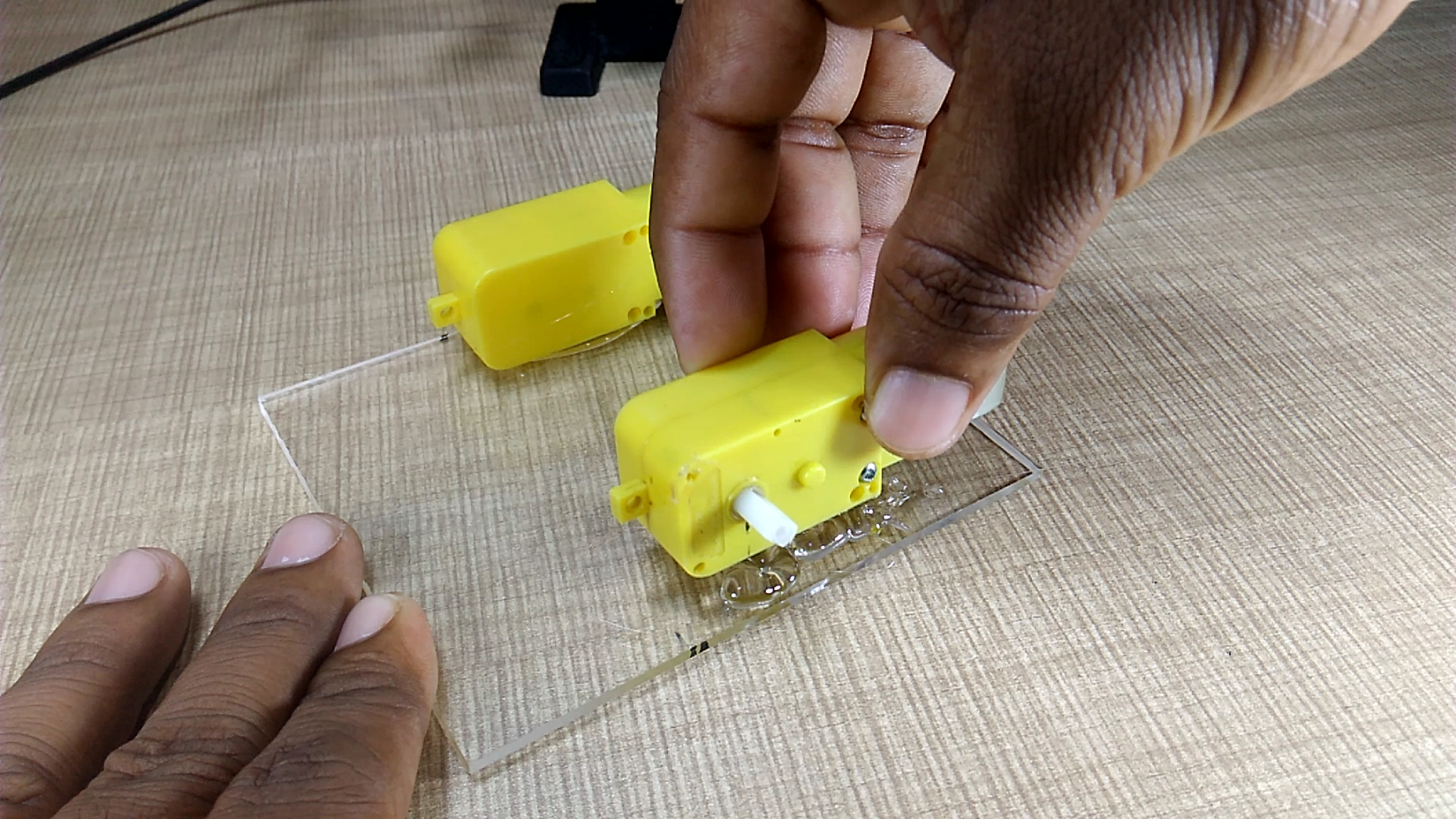
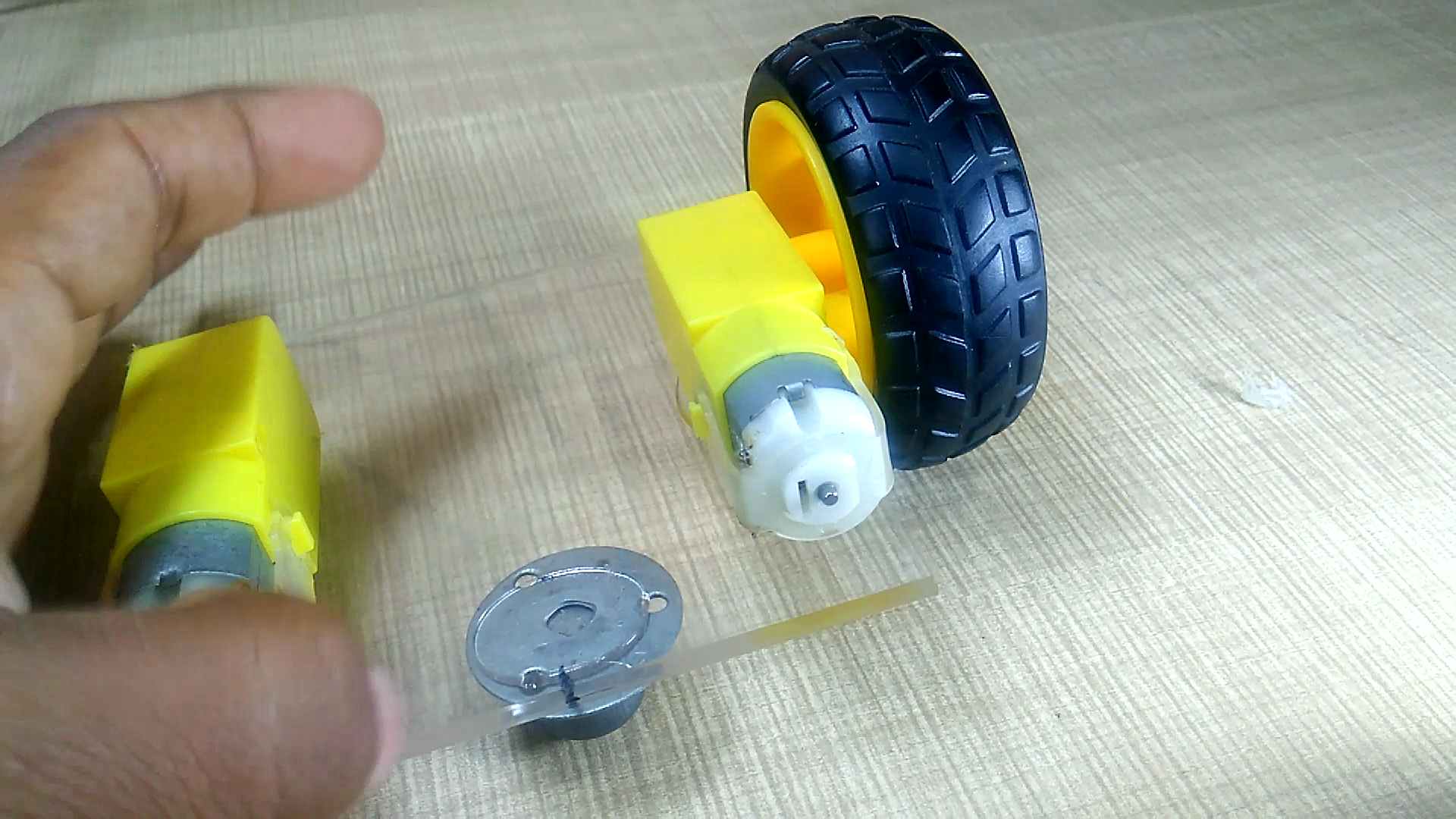
Befestigen Sie alle Komponenten auf Acrylglas und stellen Sie ein Chassis wie in den Bildern gezeigt her.


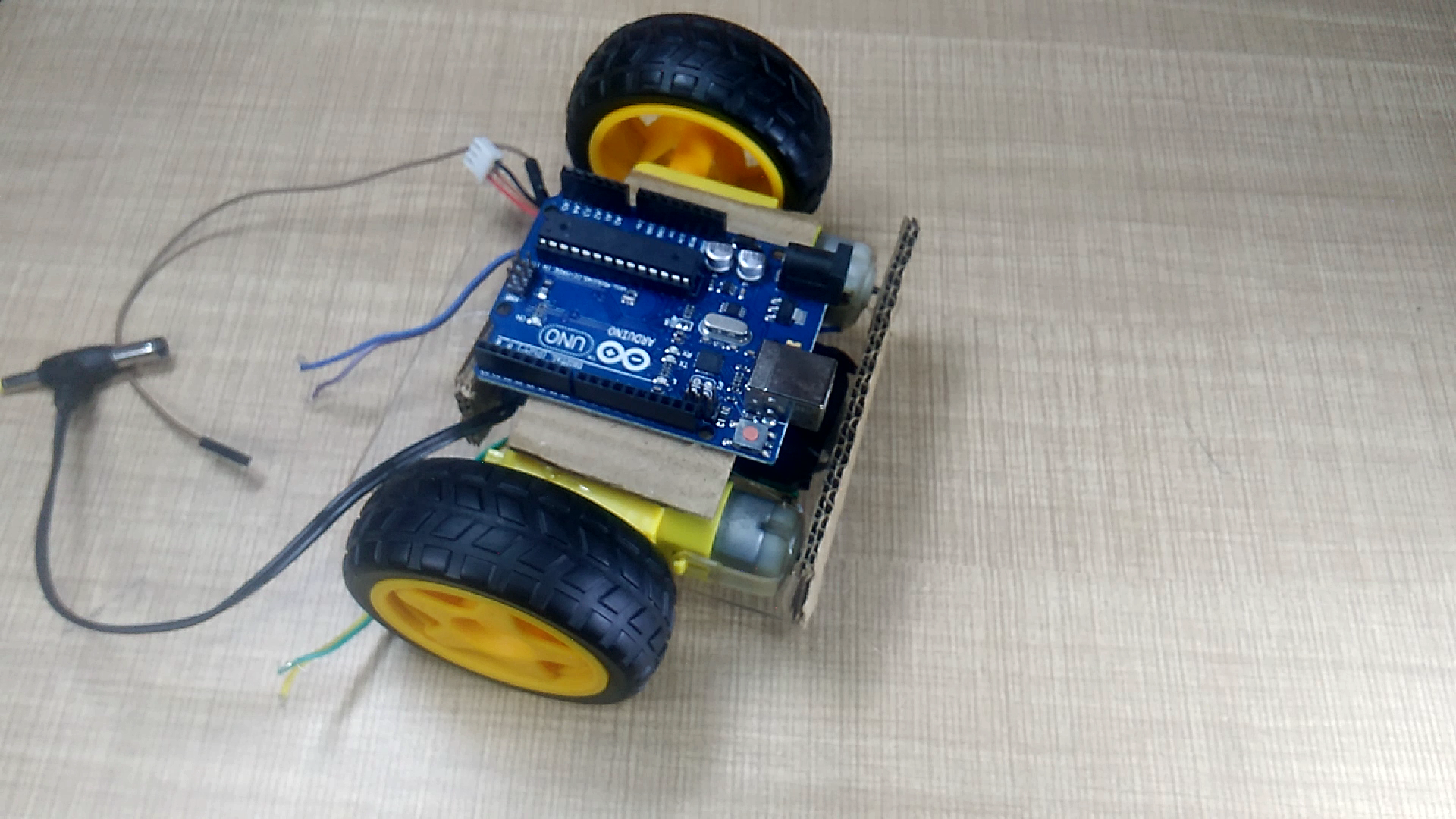

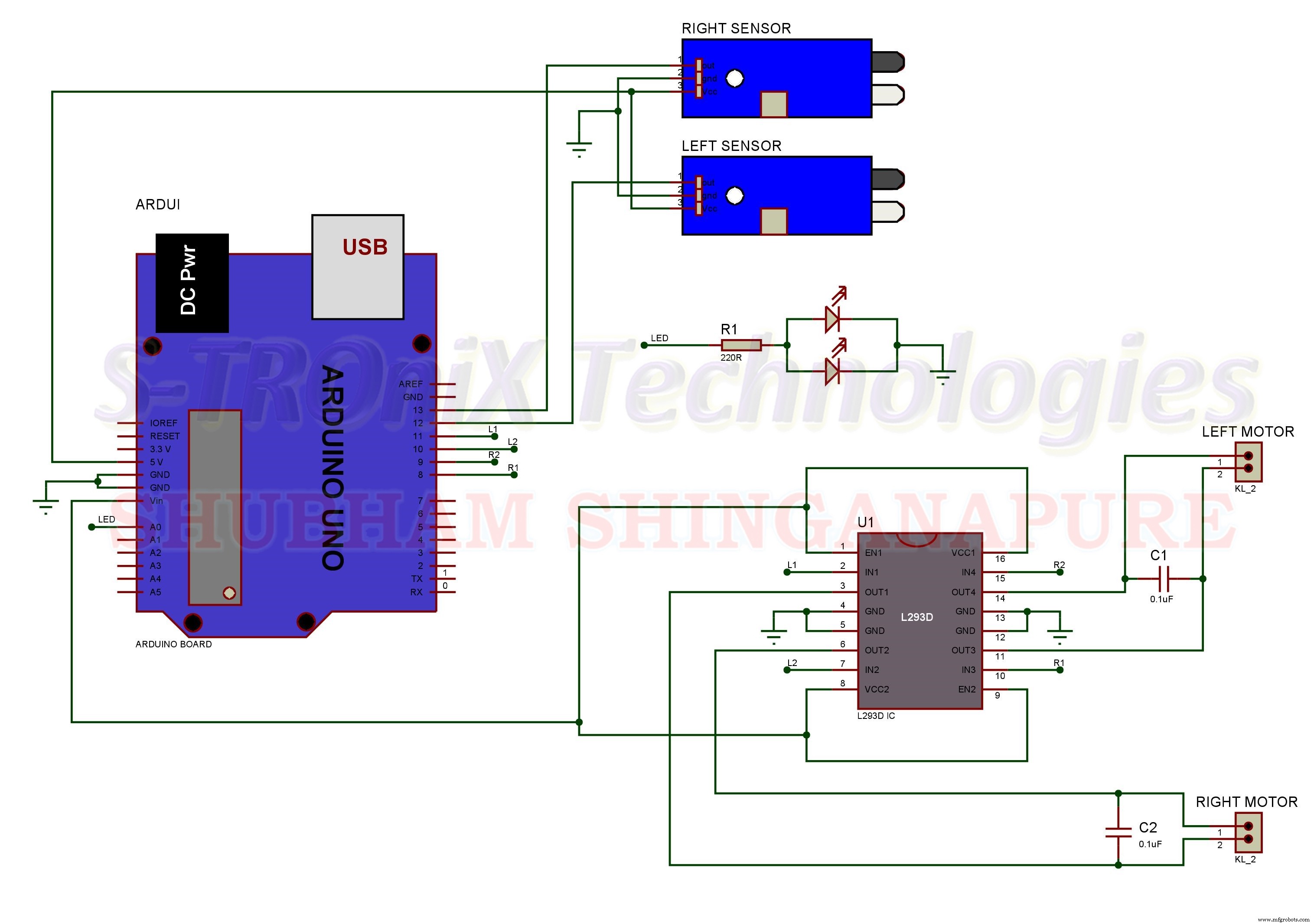
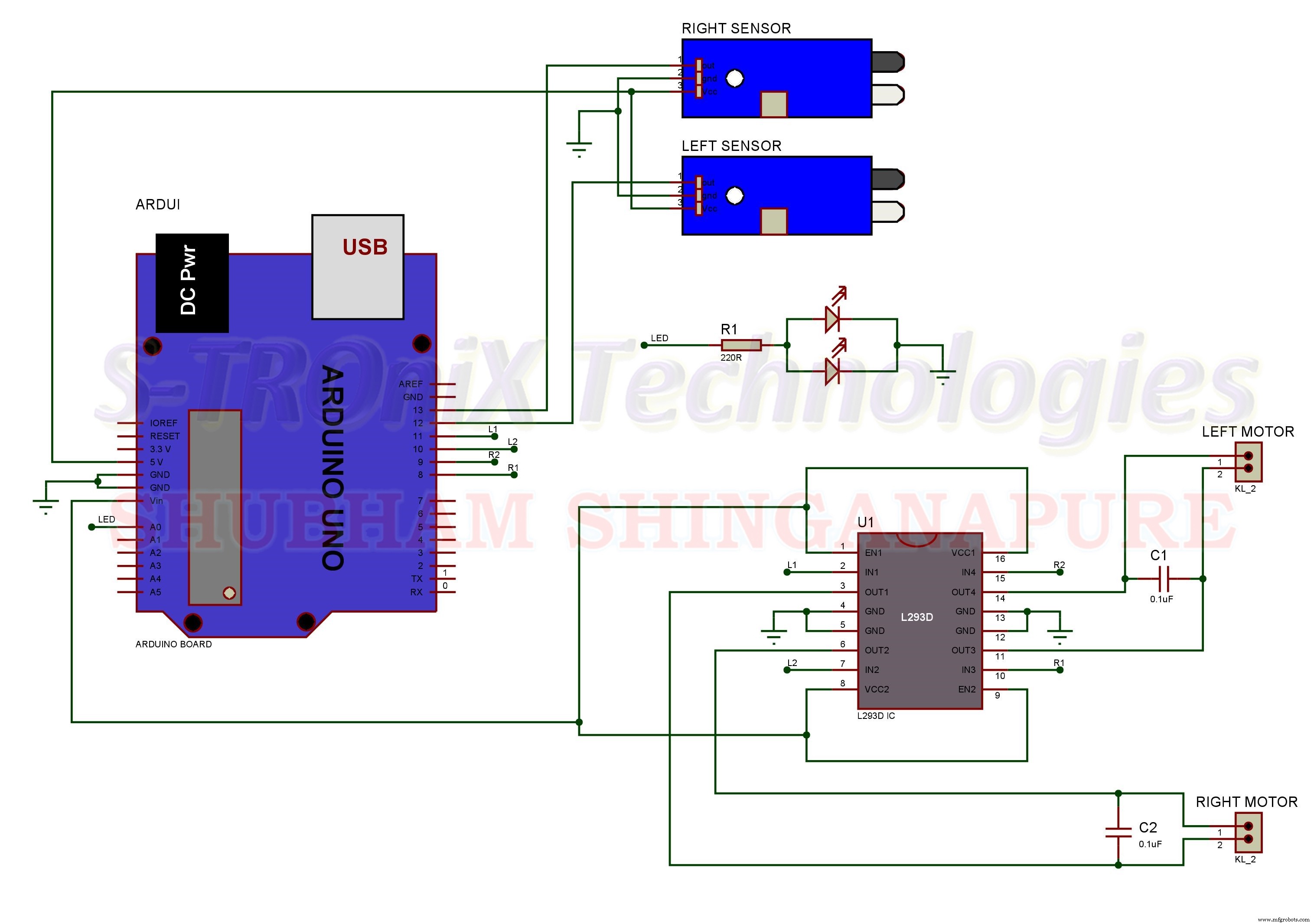
Stellen Sie nun alle Verbindungen gemäß dem folgenden Schaltplan her.
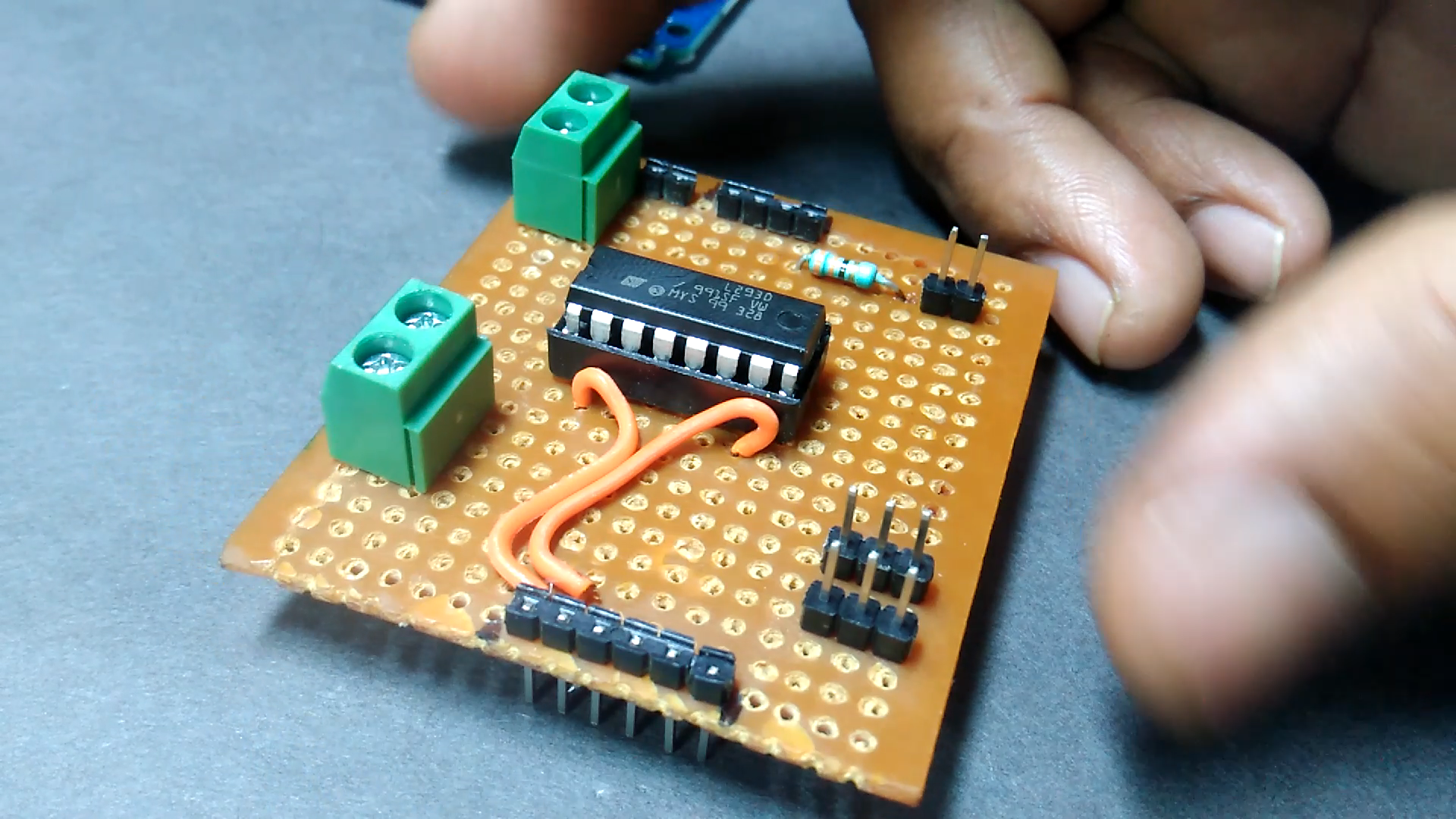
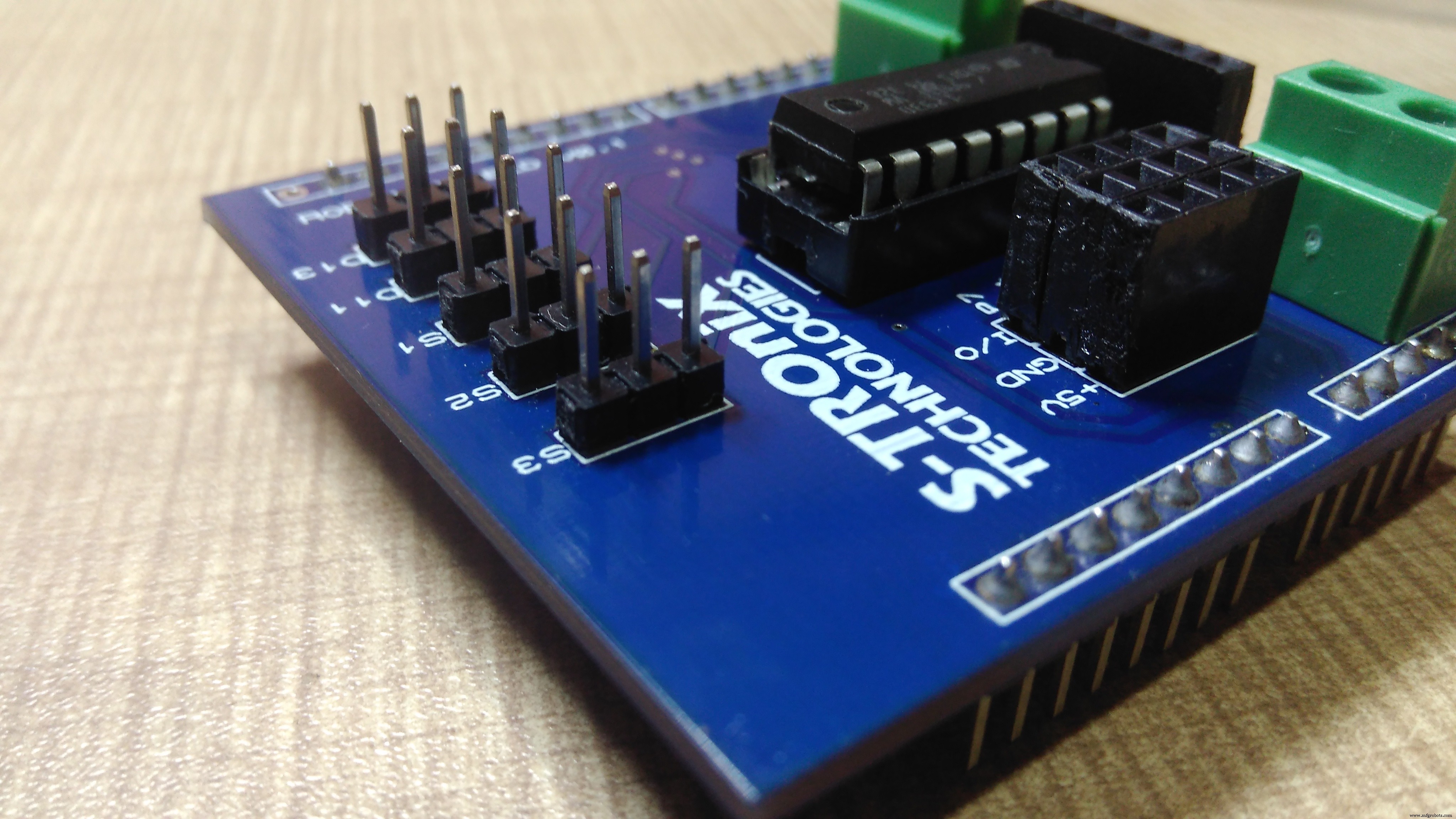
Sie können diese Schaltung auf einer gepunkteten Leiterplatte wie folgt erstellen.
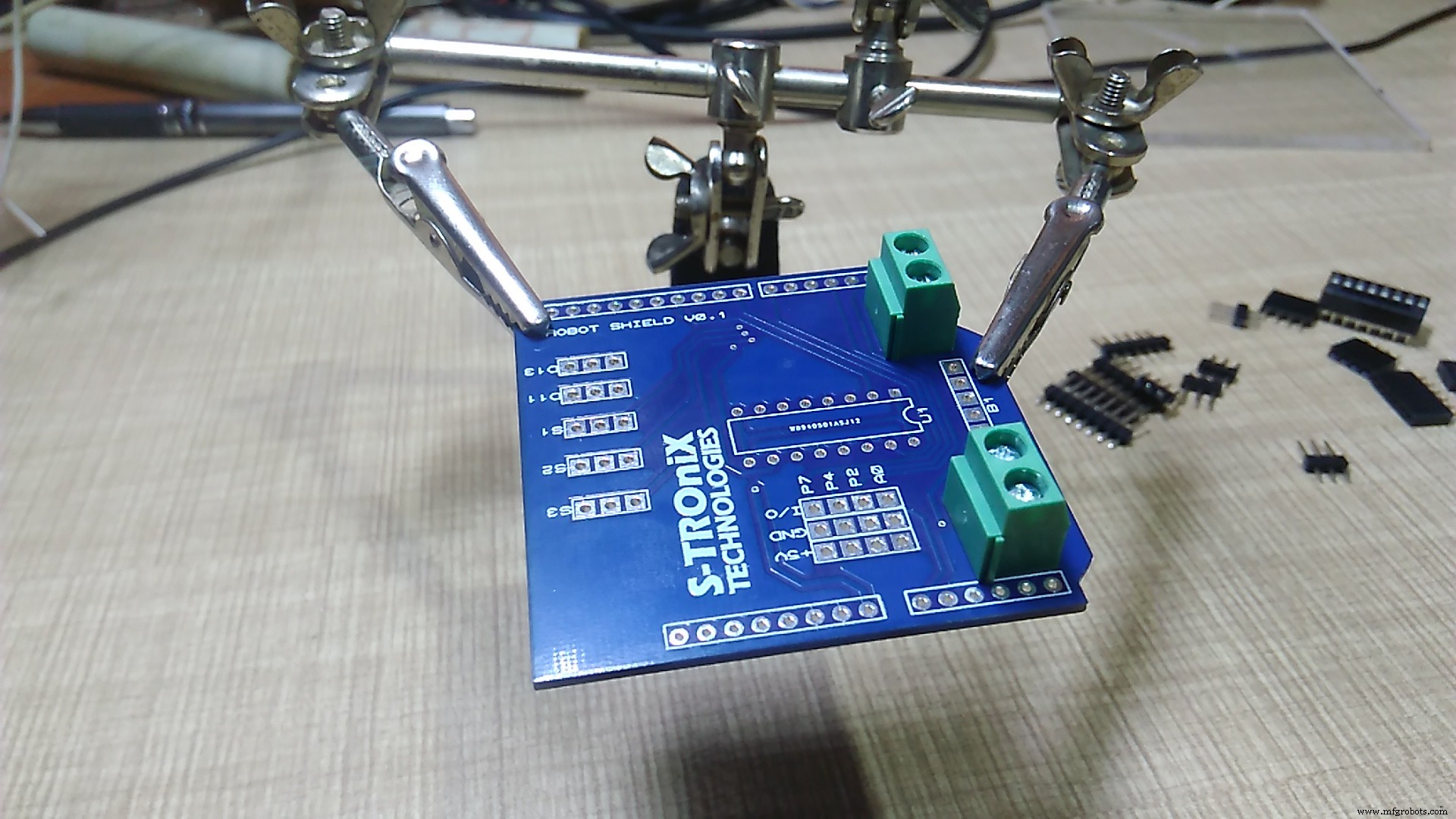
oder kann diese Art von professionell aussehender Leiterplatte verwenden.
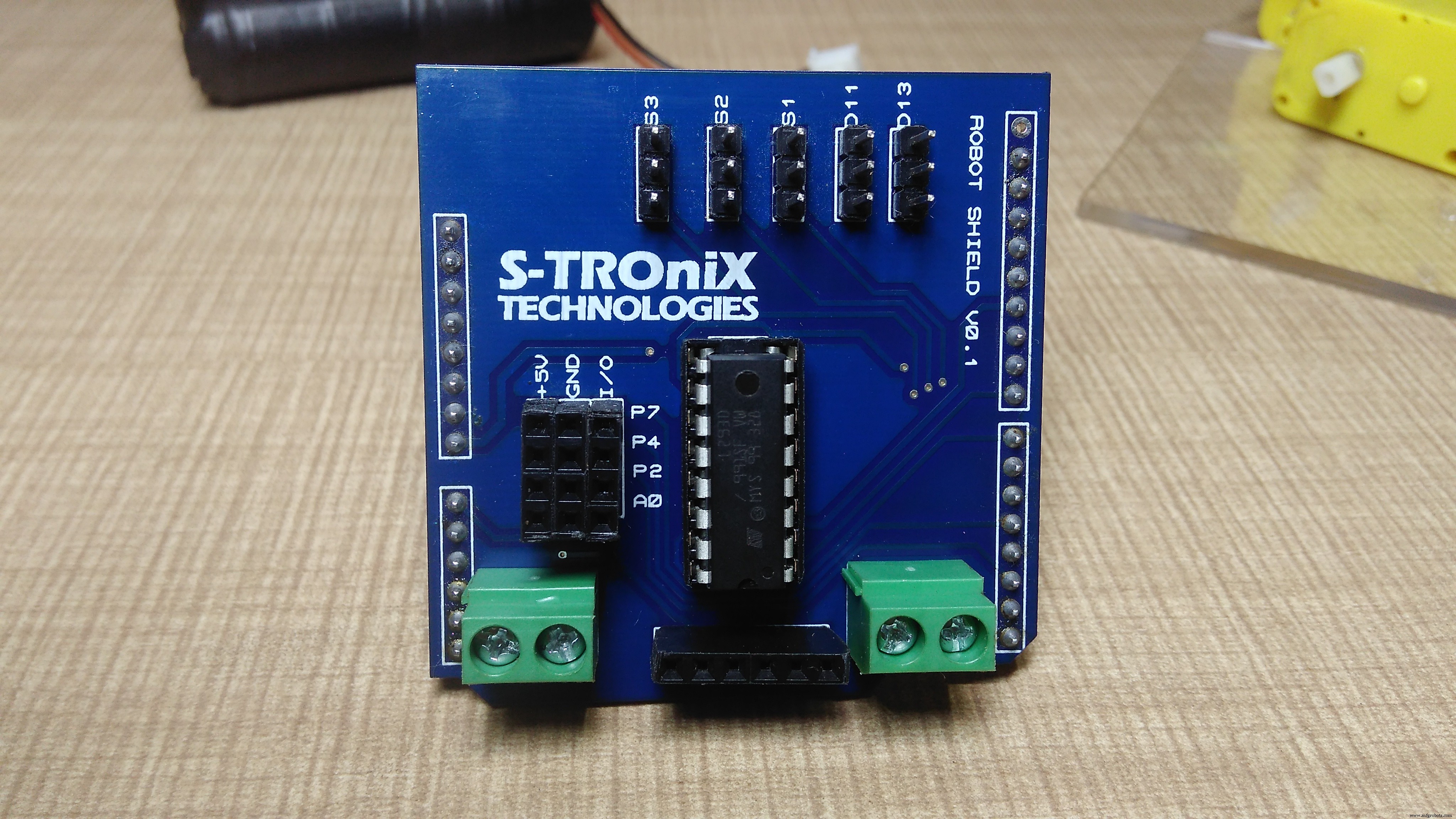
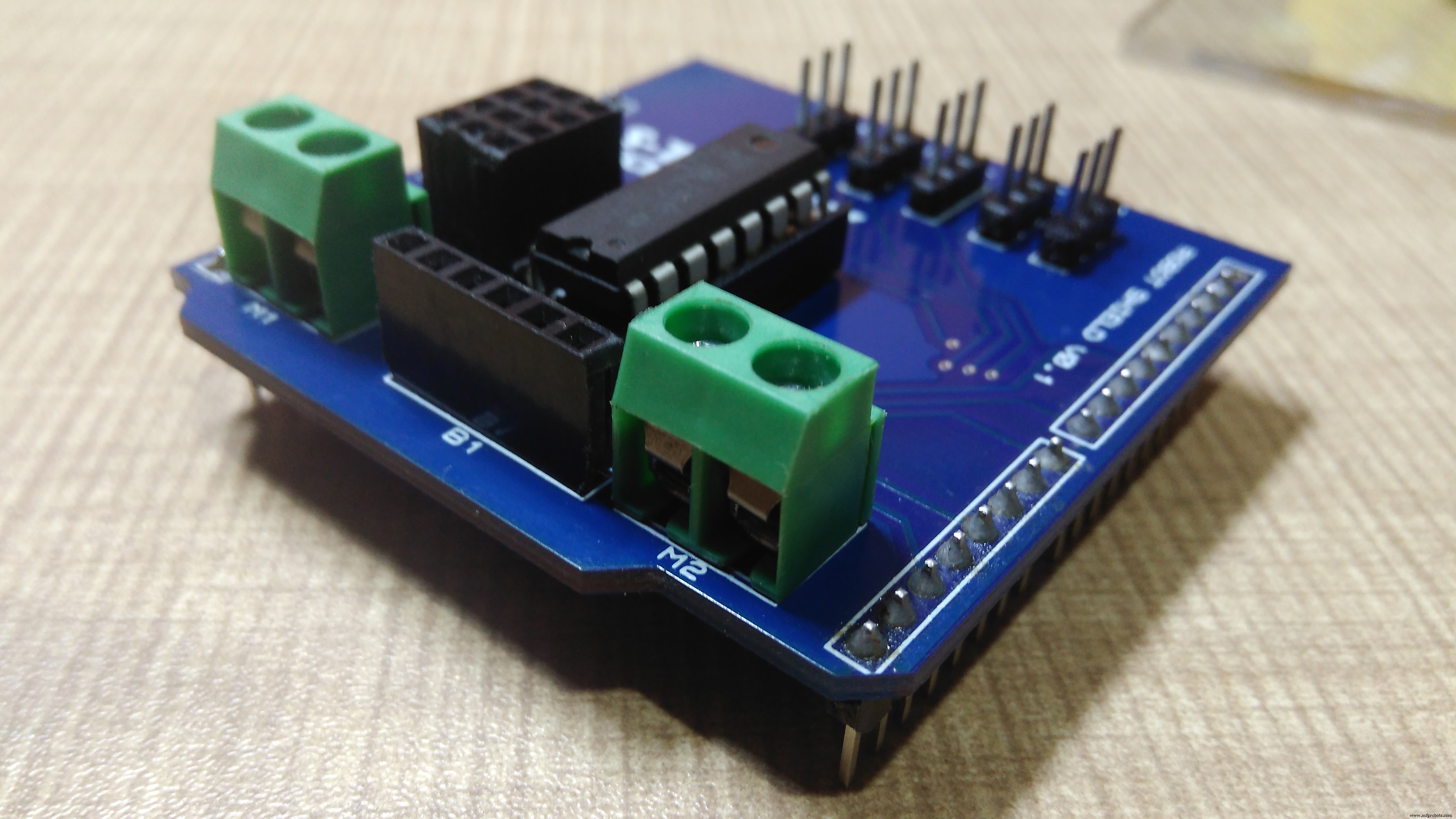
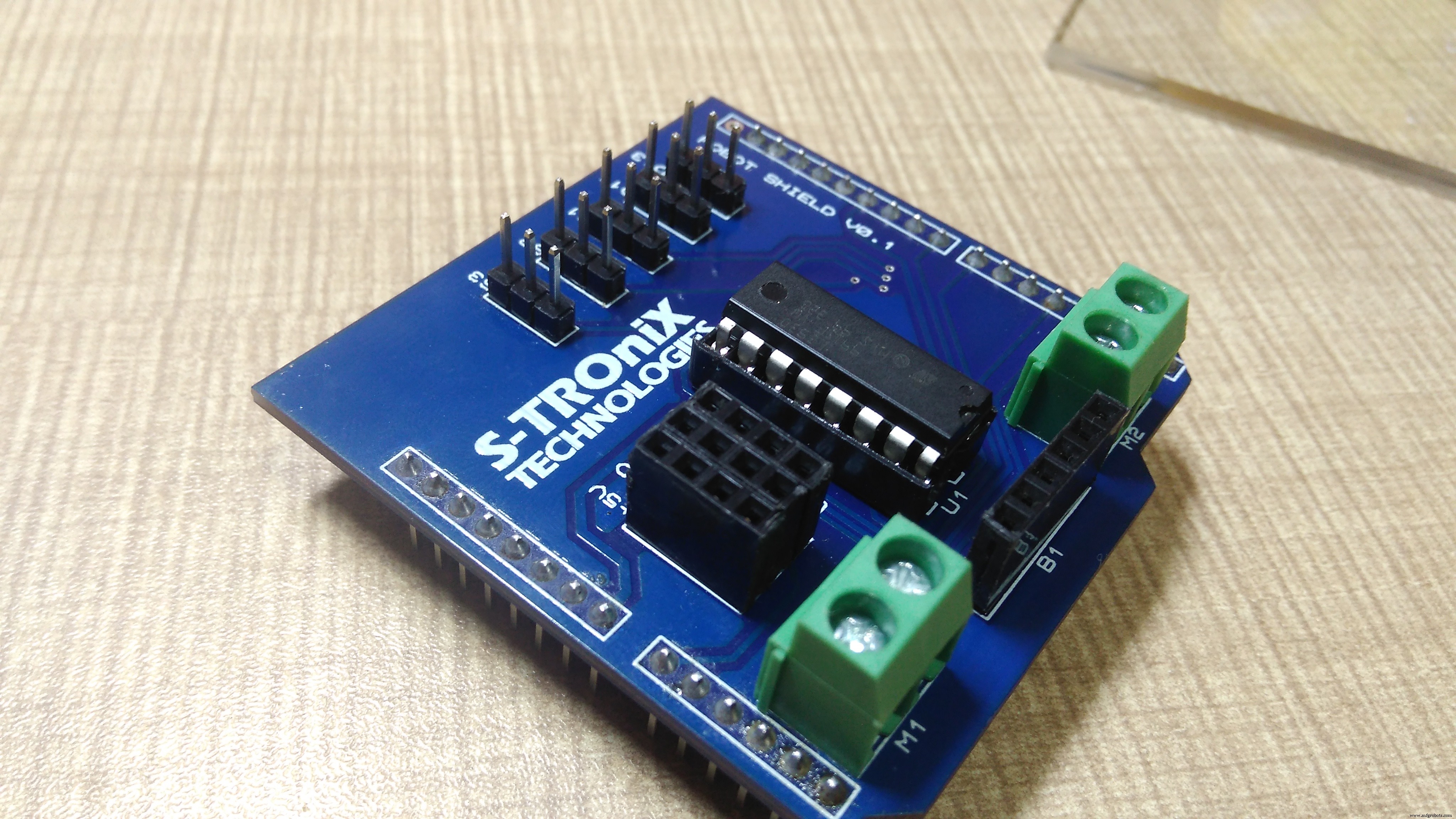
Sie können PCB für dieses Shield hier bestellen https://www.pcbway.com/project/shareproject/How_to_Make_Arduino_Based_Edge_Avoiding_Robot.html
oder für fertige Schilde kontaktieren Sie uns unter:https://www.facebook.com/STROniXTechnologies
Jetzt ist es an der Zeit, diesen Roboter zu programmieren. Laden Sie dieses Programm auf Arduino hoch und alles fertig.
//Programm von Shubham Shinganapure am 05-08-2019
//
//für Linienverfolgungsroboter mit 2IR-Sensoren
int lm1=8; // linker Motorausgang 1
int lm2=9; // linker Motorausgang 2
int rm1=10; // rechter Motorausgang 1
int rm2=11; // rechter Motorausgang 2
int sl=13; //Sensor 1 Eingang (links)
int sr=12; //Sensor 2 Eingang (rechts)
int SlV=0;
int SrV=0;
int led=A0;
void setup()
{
pinMode(lm1,OUTPUT);
pinMode(lm2,OUTPUT);
pinMode(rm1,OUTPUT);
pinMode(rm2,OUTPUT);
pinMode(led, AUSGANG);
pinMode(sl,INPUT);
pinMode(sr,INPUT);
sTOP();
}
void loop()
{
SlV=digitalRead(sl);
SrV=digitalRead(sr);
if(SrV==LOW &&SlV==LOW)
{
Forward( );
}
if(SrV==HIGH &&SlV==LOW)
{
Left();
}
if(SrV==LOW &&SlV==HIGH)
{
Right();
}
if(SrV==HIGH &&SlV==HIGH)
{
sTOP();
}
}
void ForWard()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void BackWard()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void Left()
{
digitalWrit e(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void Right()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH );
}
void sTOP()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,LOW);
digitalWrite(rm1, LOW);
digitalWrite(rm2,LOW);
} Für mehr abonniere meinen Youtube-Kanal:
Code
- Linienfolger-Roboter
Linienfolger-RoboterArduino
//Programm von Shubham Shinganapure am 05-08-2019////für Linienverfolgungsroboter mit 2IR-Sensoren int lm1=8; // linker Motorausgang 1int lm2 =9; // linker Motorausgang 2int rm1 =10; // rechter Motorausgang 1int rm2 =11; // rechter Motorausgang 2int sl =13; // Sensor 1 Eingang (links)int sr=12; // Sensor 2 Eingang (rechts)int SlV=0;int SrV=0;int led=A0;void setup () {pinMode (lm1, OUTPUT); pinMode (lm2, AUSGANG); pinMode (rm1, AUSGANG); pinMode (rm2, AUSGANG); PinMode (led, AUSGANG); pinMode (sl, EINGANG); pinMode (sr, INPUT); sTOP ();}void loop () { SlV =digitalRead (sl); SrV=digitalRead(sr); if(SrV==LOW &&SlV==LOW) {ForWard(); aufrechtzuerhalten. Wenn (SrV ==HOCH &&SlV ==NIEDRIG) { Links (); } if (SrV ==NIEDRIG &&SlV ==HOCH) { Rechts (); aufrechtzuerhalten. Wenn (SrV ==HOCH &&SlV ==HOCH) { STOP (); }}void ForWard () { digitalWrite (lm1, HIGH); digitalWrite (lm2, LOW); digitalWrite (rm1, HOCH); digitalWrite (rm2, LOW); aufrechtzuerhalten. Void BackWard () { DigitalWrite (lm1, LOW); digitalWrite (lm2, HOCH); digitalWrite (rm1, LOW); digitalWrite (rm2, HOCH); aufrechtzuerhalten. Void Links () { DigitalWrite (lm1, LOW); digitalWrite (lm2, HOCH); digitalWrite (rm1, HOCH); digitalWrite (rm2, LOW); aufrechtzuerhalten. Void Rechts () { DigitalWrite (lm1, HOCH); digitalWrite (lm2, LOW); digitalWrite (rm1, LOW); digitalWrite (rm2, HOCH); aufrechtzuerhalten. Void sSTOP () { DigitalWrite (lm1, LOW); digitalWrite (lm2, LOW); digitalWrite (rm1, LOW); digitalWrite (rm2, LOW); } Schaltpläne
Herstellungsprozess
- Raspberry Pi Roboter über Bluetooth gesteuert
- Einfacher Pi-Roboter
- Hindernisse vermeiden Roboter mit Servomotor
- Joy Robot (Robô Da Alegria)
- Geschwindigkeitslinienfolger-Roboter V4
- Sprachgesteuerter Roboter
- Arduino-gesteuerter Klavierroboter:PiBot
- Arduino-Schulungsplattform
- Autonomer Heimassistent-Roboter
- Roboter für supercoole Indoor-Navigation