


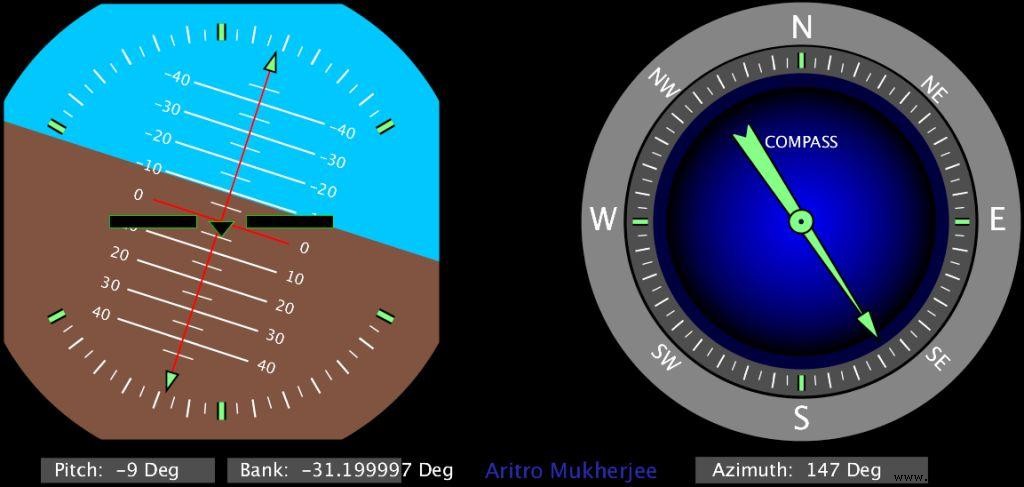
Visualisierung der 3D-Bewegung des IMU-Sensors
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Bevor wir in den Softwareteil eintauchen, stellen wir unsere Hardware-Kits zusammen.
Was ist ein MPU-6050-Sensor Die MPU-6050-Geräte kombinieren ein 3-Achsen-Gyroskop und ein 3-Achsen-Beschleunigungsmesser auf demselben Siliziumchip zusammen mit einem integrierten Digital Motion Processor (DMP) , das komplexe 6-Achsen-MotionFusion verarbeitet Algorithmen. Jetzt können Sie also die Bedeutung von 6DOF - 6 Freiheitsgraden entschlüsseln.
Einzelheiten zum Anschlussschema und zur Hardwareeinrichtung finden Sie in meinem vorherigen Blog.
Kommen wir nun zur Verarbeitungssoftware, die die 3D-Visualisierung dieses Bewegungssensors erleichtert.
Erforderliche Software:
- ProcessingIDE
Wenn man bedenkt, dass Sie bereits ArduinoIDE mit zwei separaten IDEs installiert haben, können Sie sich etwas verwirrt fühlen. Nun, es besteht kein Grund zur Panik. Befolgen Sie die folgenden Schritte und alle Ihre Zweifel werden ausgeräumt!
Die Verarbeitung ist mit Ausnahme einiger spezialisierter Funktionen der von ArduinoIDE ziemlich ähnlich. Sie werden also einen Einfluss/eine Ähnlichkeit in ProcessingIDE sehen.
Abbildung 1 und Abbildung 2 verdeutlichen meine Aussagen.

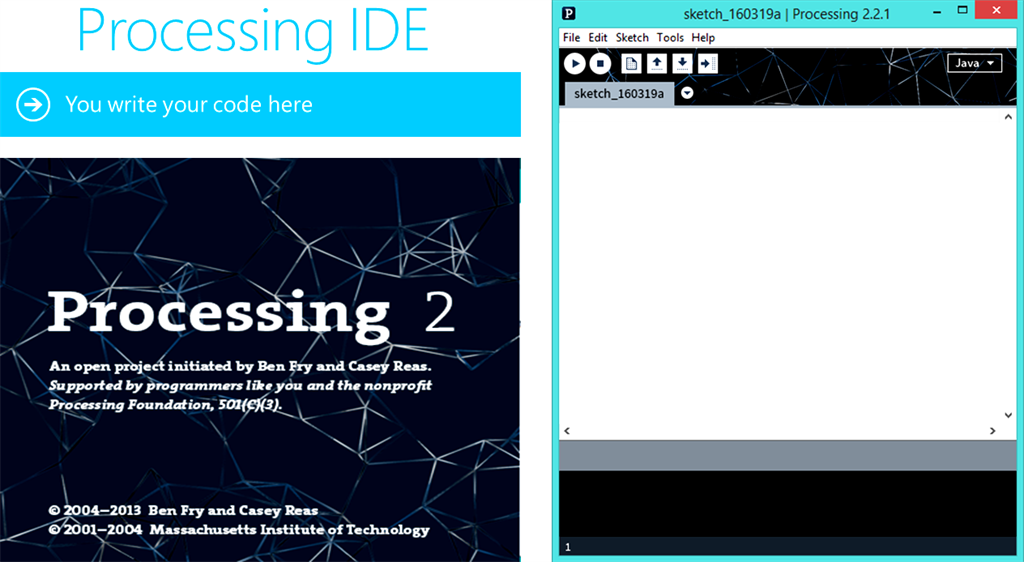
Wir sehen also, dass diese beiden IDEs eine erstaunliche visuelle Ähnlichkeit aufweisen. Nachdem Sie die Processing IDE installiert haben, müssen Sie zu Verarbeitungszwecken eine spezielle Bibliothek namens "Toxi" herunterladen. Das Auffinden einer "Toxi"-Datei kann im World Wide Web sehr hektisch sein. Deshalb habe ich es Ihnen erleichtert, indem ich es auf meinen Github hochgeladen habe. Klicken Sie auf diesen Link und laden Sie die Datei mit dem Namen "toxiclibs-complete-0020" herunter. Als nächstes entpacken Sie den Ordner . Kopieren Sie die "toxiclibs-complete-0020" Ordner und fügen Sie ihn unter "Bibliotheken" ein Ordner von Processing.Kann "Bibliotheken-Ordner nicht finden "? Dann erstellen Sie eine! ja. Wenn Sie keine "Bibliotheken . finden können "-Ordner, erstellen Sie einen Ordner und benennen Sie ihn als "Bibliotheken ". Fügen Sie jetzt Ihre "toxiclibs-complete-0020" ein Ordner darin. Nachdem Sie diese Schritte ordnungsgemäß ausgeführt haben, führen Sie die Verarbeitungs-IDE aus. Zeit zum Coden! Um die 3D-Visualisierung zu visualisieren, müssen Sie zuerst den Arduino-Code für MPU-6050 hochladen (Entpacken Sie die .ino-Datei aus dem Ordner MPU6050_DMP6.rar). Danach müssen Sie bestimmte Änderungen wie unten beschrieben vornehmen. Sie müssen diesen Code kommentieren, der besagt:
#define OUTPUT_READABLE_YAWPITCHROLL nach // #define OUTPUT_READABLE_YAWPITCHROLL
Entkommentieren Sie auch den Code, der sagt:
//#define OUTPUT_TEAPOT nach #define OUTPUT_TEAPOT
Öffnen Sie als nächstes das Verarbeitungsbeispiel für die MPU-6050. Gehen Sie zur Symbolleiste, klicken Sie auf Datei -> Öffnen. Navigieren Sie dann zu dem Ordner, in dem Sie die MPU-6050-Bibliothek für Arduino installiert haben. Sie können das Verarbeitungsbeispiel leicht finden:Folgen Sie der Ablaufreihenfolge:MPU6050> Beispiele> MPU6050_DMP6> Verarbeitung> MPUTeapot. Wie bei ArduinoIDE, überprüfen Sie auch in diesem Fall die darin definierte serielle Schnittstelle. Überprüfen Sie nun den Code. Sie werden sehen, dass die Zeile ihn standardmäßig für linux/mac definiert Benutzer als:
String portName = "/dev/ttyUSB1";
Sie müssen String portName in den Port ändern, an dem Ihr Arduino angeschlossen ist. Siehe Abbildung 3.

Für Windows Benutzer, kommentieren Sie diesen Code als:
//String portName = "/dev/ttyUSB1";
Entkommentieren Sie diesen Code ebenfalls als:
//String portName ="COM15"; nach String portName ="COM15";
Ersetzen Sie "COM15 " mit dem COM-Port, an dem Ihr Arduino angeschlossen ist (überprüfen Sie dies, indem Sie in arduino und Tools -> Serial Port gehen). So, endlich ist die Einrichtung abgeschlossen, jetzt sind es nur noch wenige Minuten! Laden Sie den Arduino-Code hoch (MPU6050_DMP6) über Arduino.Hinweis: ÖFFNEN SIE DEN SERIELLEN MONITOR NICHT, während der Prozess läuft. (Warum? weil wir den Code auf ProcessingIDE statt auf ArduinoIDE visualisieren)
Führen Sie als Nächstes den Verarbeitungscode (MPUTeapot) aus, indem Sie die Schaltfläche mit "play" . drücken Symbol. Sie sehen ein kleines flugzeugähnliches Objekt. Warten Sie etwa 10-12 Sekunden, bis sich die MPU-6050-Werte stabilisiert haben. Danach sehen Sie, wie sich das 3D-Modell mit dem MPU-6050-Sensor entsprechend bewegt.Siehe untenstehendes GIF.Für ein besseres Verständnis besuchen Sie YouTube
Entwerfen Sie Ihre eigenen maßgeschneiderten Flugsimulator-Instrumente in meinem nächsten Tutorial.
Bitte kommentieren Sie unten, wenn Sie Probleme mit dem Hardware- / Software-Setup haben.
Code
Vollständiger Projektcode
Laden Sie diesen Ordner herunter und befolgen Sie die Anweisungen in diesem Tutorial.https://github.com/AritroMukherjee/MPU5060sensor/blob/master/MPU6050.zipSchaltpläne
Folgen Sie meinem vorherigen Blog-Post für eine Schritt-für-Schritt-Anleitung zum Einrichten eines IMU (MPU-6050)-Sensors mit einem Arduino. Link (https://www.hackster.io/Aritro/getting-started-with-imu-6-dof-motion-sensor-96e066)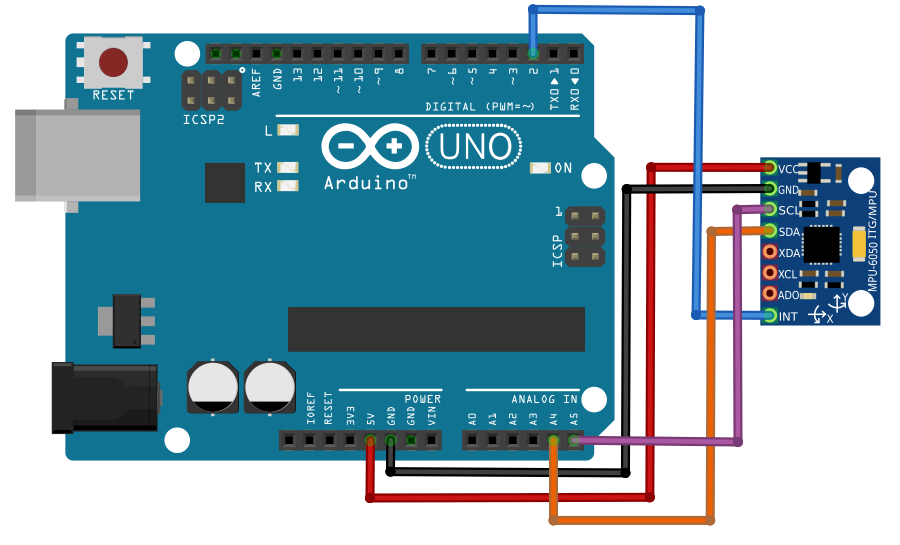
Herstellungsprozess
- Logic-X führt eine neue Marke von COTS-Sensorverarbeitungsprodukten ein
- Computer Vision als Bewegungssensor für SmartThings
- Bewegungssensor, Alarm, Videoaufzeichnung in HA auf Raspberry Pi
- DIY Infrarot-Bewegungssensorsystem für Raspberry Pi
- Bewegungssensor mit Raspberry Pi
- Raspberry Pi-Temperatursensor
- Raspberry Pi GPIO mit PIR-Bewegungssensor:Bestes Tutorial
- Anbindung des PIR-Bewegungssensors HC-SR501 an Raspberry Pi
- Emotionssensor / EEG
- Elektronischer Hautsensor dekodiert menschliche Bewegungen