


intelligenter sprechender humanoider Roboter nur mit Arduino!
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Dieser Roboter - Mofiza- (seltsamer Name) kann ihre Umgebung SEHEN, SPRECHEN und REAGIEREN. Bevor ich fortfahre, schau dir das Video an:
Seit ich sprechende Roboter gebaut habe, habe ich gesehen, dass die Leute tatsächlich andere Entwicklungsboards als Arduino verwenden, um sprechende Roboter zu bauen. Aber es ist durchaus möglich, mit Arduino einen humanoiden Roboter zu bauen, der sprechen und viele Servos hinzufügen kann, um ihn zu bewegen. Also fangen wir an:
Update (wie ich es gemacht habe) -
Schritt 1:Benötigte Teile


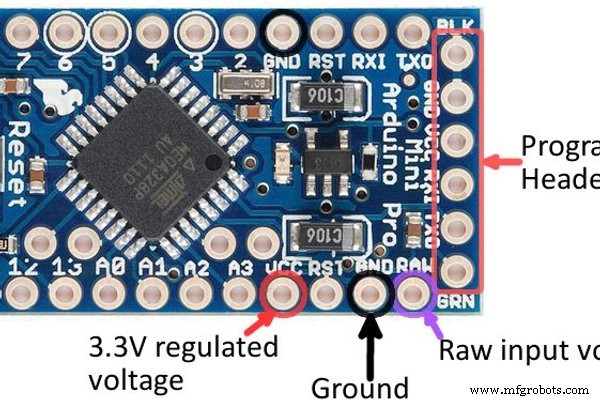
- Arduino Pro mini (5v 16 Mhz) [jedes Board ist gut, aber ich habe es verwendet, um es klein zu machen)
- Buchsenleisten zum Anschließen an die Leiterplatte
- Steckerstifte
- Vero Board, um die Schaltung zu machen
- SD-Karte TF-Modul (um es zum Sprechen zu bringen)
- Micro-SD-Karte (nicht mehr als 2 GB)
- 3x IR-Näherungssensor
- 3x Servomotor (ich habe Mikroservo sg90 verwendet)
- Karton für den Körper
Schritt 2:Verbinden des IR-Sensors mit dem Körper

Machen Sie einen Körper mit allem, was Sie wollen, ich habe es aus Pappe gemacht. Es ist ziemlich einfach.
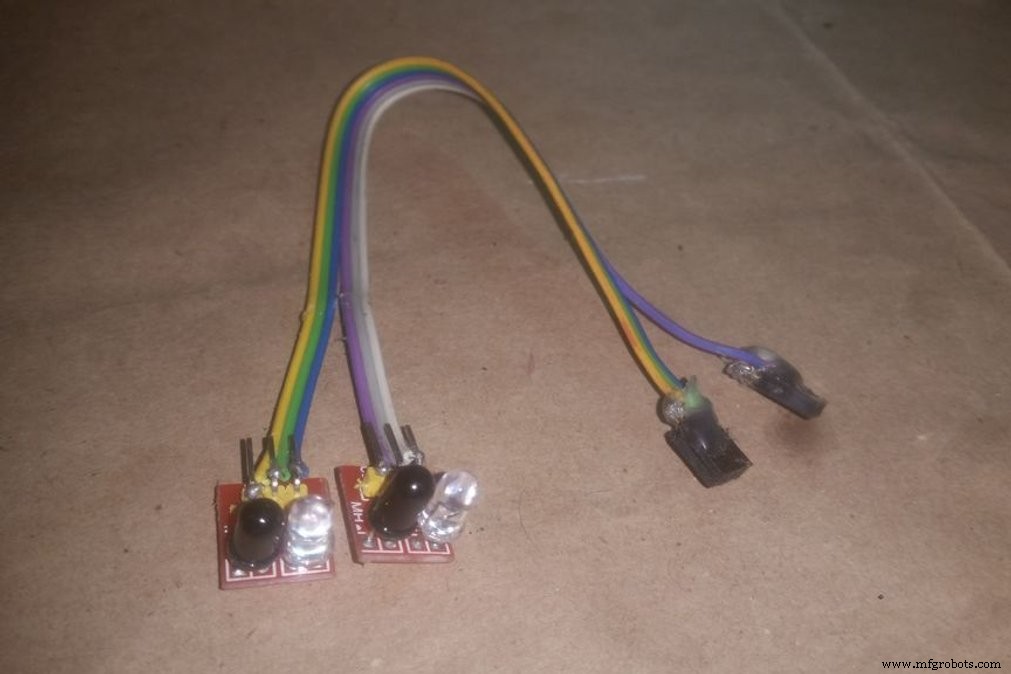
Ich habe IR-Sensoren mit Flachbandkabel einfach so mit einer Buchsenleiste an einem Ende gelötet und zwei in zwei Augen und eine in der Brust hinzugefügt.
Der Roboter sagt die Willkommensnachricht, wenn er etwas im Brustsensor erkennt und sagt "aaaah.. berühre mein Auge nicht", wenn ein Augensensor hoch ist. und das Servo in diesem Bereich bewegt sich nach oben.
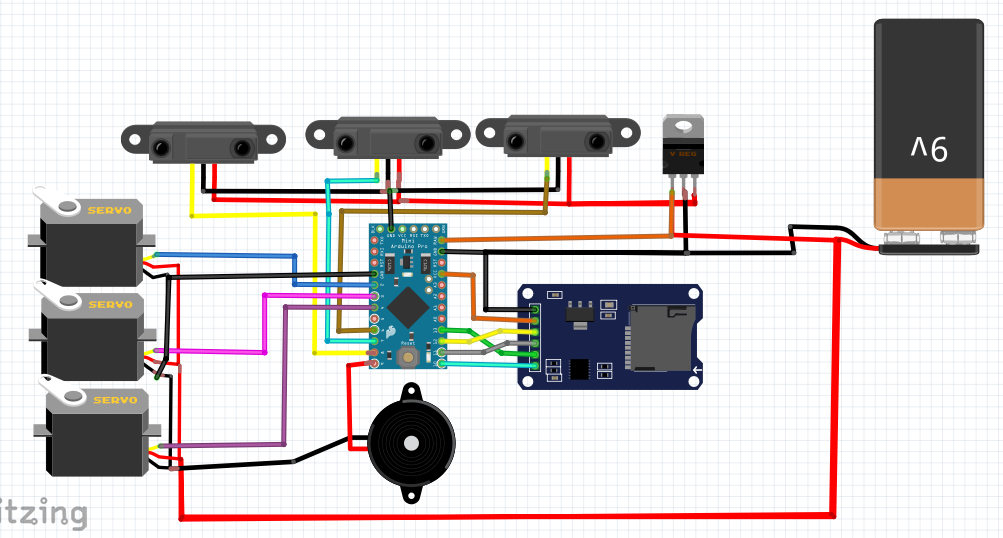
Schritt 3:Die Schaltung
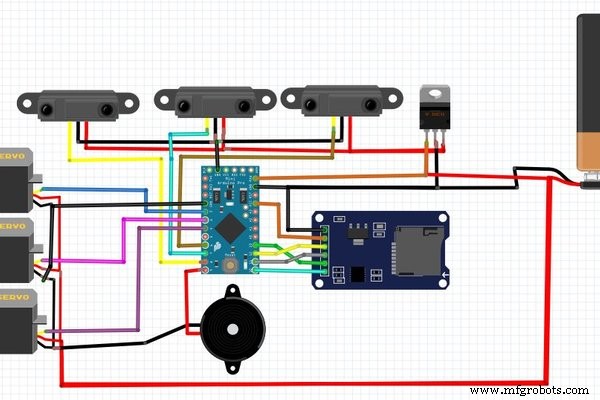
Die Schaltung sieht etwas kompliziert aus, aber nein, es ist alles zu einfach, Sie können es einfach mit einer Batterie betreiben. Löten Sie die Schaltung und alle anderen Komponenten in einer Vero-Platine und fügen Sie andere Servos an Kopf und Händen hinzu.
Schritt 4:Code
Vor den Codes:
Ich musste zwei Bibliotheken für diesen Roboter verwenden.
TMRpcm.h - zum Abspielen von Audio von SD-Karte - Talk https://github.com/TMRh20/TMRpcm
ServoTimer2.h - Vermeiden Sie Konflikte mit TMRpcm und führen Sie Servomotoren mit Timer2 aus, da TMRpcm Timer1 auf Arduino verwendet. https://create.arduino.cc/projecthub/ashraf_minhaj/how-to-use-servotimer2-library-simple-explain-servo-sweep-512fd9?ref=user&ref_id=507819&offset=1
Dies ist der Code, um Willkommen zu sagen. Sie können Ihre eigene Umgebung und Ihren eigenen Code erstellen. Bevor Sie zum Code gelangen, müssen Sie die ServoTimer2-Bibliothek hinzufügen. Der Roboter läuft auch nicht.
Und dann hoch Der Code:
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha;ServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin (9600); if(!SD.begin(SD_ChipSelectPin)) {Serial.println("SD FAIL"); Rückkehr; }}void loop () { if (! (digitalRead (in3))) { tmrpcm.play ( "welcome.wav"); lhand.write(2500); Verzögerung (2000); lhand.write(1200); // Handshake-Positionsverzögerung (9000); aufrechtzuerhalten. Sonst { lhand.write (300); rhand.write(1700); matha.write(1500); }}
Schritt 5:Fertig
Jetzt einfach einschalten und fertig. Ein intelligenter Roboter ist fertig. [Ich werde bald andere Bilder und Details hochladen]
Wenn ich mehr Pins bekommen könnte, würde ich den Roboter laufen lassen. aber ich hatte nur noch 3 Pins übrig (digital). Es ist weniger als ich brauche.
Unterstützen Sie mich, indem Sie meinen YouTube-Kanal abonnieren.
Code
- mofiza.welcome.code
mofiza.welcome.codeC/C++
#include "ServoTimer2.h"#include#define SD_ChipSelectPin 10#include"TMRpcm.h"#includeTMRpcm tmrpcm;ServoTimer2 matha; //matha bedeutet HEADServoTimer2 lhand;ServoTimer2 rhand;int in1=6;int in2=7;int in3=8;void setup() { matha.attach(2); lhand.attach(3); rhand.attach(4); tmrpcm.speakerPin=9; Serial.begin (9600); if(!SD.begin(SD_ChipSelectPin)) {Serial.println("SD FAIL"); Rückkehr; }}void loop () { if (! (digitalRead (in3))) { tmrpcm.play ( "welcome.wav"); lhand.write(2500); Verzögerung (2000); lhand.write(1200); // Handshake-Positionsverzögerung (9000); aufrechtzuerhalten. sonst { lhand.write (300); rhand.write(1700); matha.write(1500); }} mofiza.fullCode.v1.1
https://github.com/ashraf-minhaj/Mofiza--Humanoid-social-robotSchaltpläne
Herstellungsprozess
- Bauen Sie Ihren internetgesteuerten Videostreaming-Roboter mit Arduino und Raspberry Pi
- Smart Blinds
- Münzprüfer mit Arduino steuern
- Hindernisse vermeiden Roboter mit Servomotor
- Arduino mit Bluetooth zur Steuerung einer LED!
- Linienfolger-Roboter
- Steuerung eines Roomba-Roboters mit Arduino und Android-Gerät
- Sprachgesteuerter Roboter
- Steuern Sie den Arduino-Roboterarm mit der Android-App
- Smart Battery Charger Multiplexer mit Smart Display