Steuern Sie den Arduino-Roboterarm mit der Android-App
Komponenten und Verbrauchsmaterialien
Über dieses Projekt
Dieses Tutorial basiert auf Ressourcen von dieser Seite.
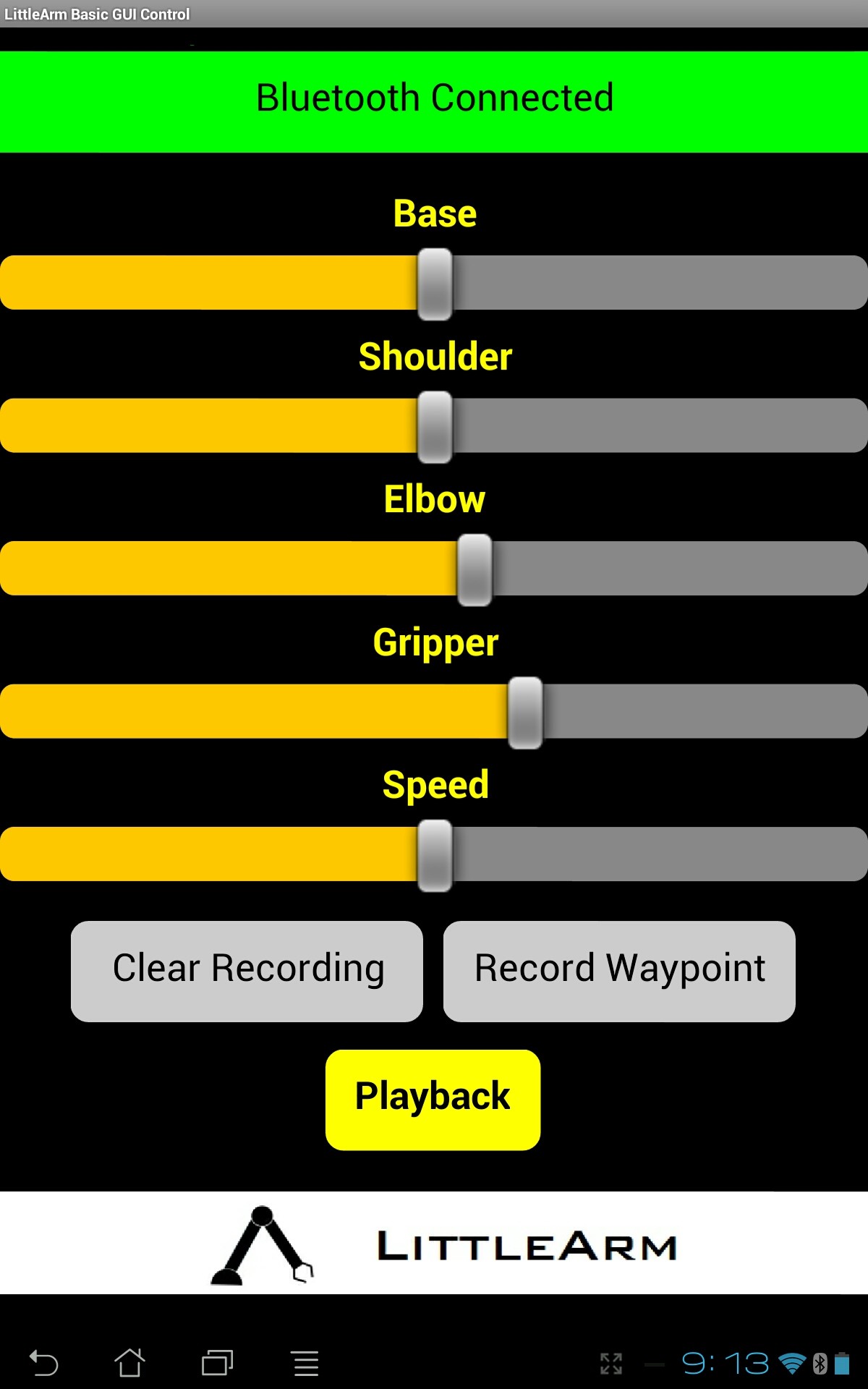
Der LittleArm wird traditionell über eine kostenlose Desktop-Computeranwendung gesteuert, die unter Windows und Linux läuft. Dies erfordert jedoch, dass der LittleArm an einen zu steuernden Computer angeschlossen ist. Wir haben endlich die App für den LittleArm fertiggestellt, damit Sie den Arduino drahtlos mit Bluetooth steuern können.
Mit der App können Sie alle DOFs des LittleArm steuern, aber auch Befehlssätze aufzeichnen und wiedergeben. Der Code für den Arduino ändert sich nicht von unserem traditionellen Code in den Softwarepaketen von hier.
Die LittleArm-App für dieses Projekt kann hier heruntergeladen werden.
Code
Arduino-CodeArduino
Dieser Code kann entweder mit der Desktop- oder Android-App über Bluetooth oder USB verwendet werden#include //arduino-Bibliothek#include //Standard-C-Bibliothek#define PI 3.141Servo baseServo; Servo SchulterServo; Servo WinkelServo; ServogreiferServo;int command;struct jointAngle{ int base; int Schulter; int Ellenbogen;};int wishGrip;int gripperPos;int wishDelay;int servoSpeed =15;int ready =0;struct jointAngle wishAngle; //gewünschte Winkel der Servos //++++++++++++++++FUNKTIONSERKLÄRUNGEN++++++++++++++++++++++++ +++int servoParallelControl (int thePos, Servo theServo );//++++++++++++++++++++++++++++++++++ +++++++++++++++++++++++void setup () { Serial.begin (9600); baseServo.attach(9); // befestigt das Servo an Pin 9 an das Servo-Objekt ShoulderServo.attach (10); EllenbogenServo.attach(11); gripperServo.attach(6); Serial.setTimeout(50); // stellt sicher, dass das Arduino die Serie nicht zu lange liest Serial.println ( "gestartet"); baseServo.write(90); // Anfangspositionen der Servos ShoulderServo.write (150); EllenbogenServo.write(110); ready =0;} // primäre arduino loopvoid loop () { if (Serial.available ()) { ready =1; gewünschteWinkel.base =Serial.parseInt(); gewünschteAngle.shoulder =Serial.parseInt(); wünschenswertAngle.elbow =Serial.parseInt(); erwünschtGrip =Serial.parseInt(); gewünschteVerzögerung =Serial.parseInt(); if(Serial.read() =='\n'){// wenn das letzte Byte 'd' ist, dann hör auf zu lesen und führe den Befehl aus 'd' steht für 'done' Serial.flush(); // alle anderen im Puffer gestapelten Befehle löschen // Vervollständigung des Befehls senden Serial.print ('d'); } } int status1 =0; int-Status2 =0; int-Status3 =0; int-Status4 =0; int erledigt =0; while(done ==0 &&ready ==1) {// das Servo in die gewünschte Position bewegen status1 =servoParallelControl(desiredAngle.base, baseServo, wishDelay); status2 =servoParallelControl (gewünschter Winkel.Schulter, SchulterServo, gewünschte Verzögerung); status3 =servoParallelControl(desiredAngle.elbow, ElbowServo, wishDelay); status4 =servoParallelControl(desiredGrip, gripperServo, selectedDelay); if (status1 ==1 &status2 ==1 &status3 ==1 &status4 ==1){ fertig =1; } }// Ende von while }//++++++++++++++++++++++++++++++FUNKTIONSDEFITNITIONEN++++++++ +++++++++++++++++++++++++++++++++int servoParallelControl (int thePos, Servo theServo, int theSpeed ){ int startPos =theServo.read(); // Lesen Sie die aktuelle Position int newPos =startPos; //int theSpeed =Geschwindigkeit; // Definiere, wo die Position in Bezug auf den Befehl ist // wenn die aktuelle Position kleiner ist als die tatsächliche Bewegung nach oben if (startPos <(thePos-5)) { newPos =newPos + 1; theServo.write(newPos); Verzögerung (theSpeed); 0 zurückgeben; aufrechtzuerhalten. Sonst if (newPos> (thePos + 5)) {newPos =newPos - 1; theServo.write(newPos); Verzögerung (theSpeed); 0 zurückgeben; aufrechtzuerhalten. Sonst { 1 zurückgeben; } }
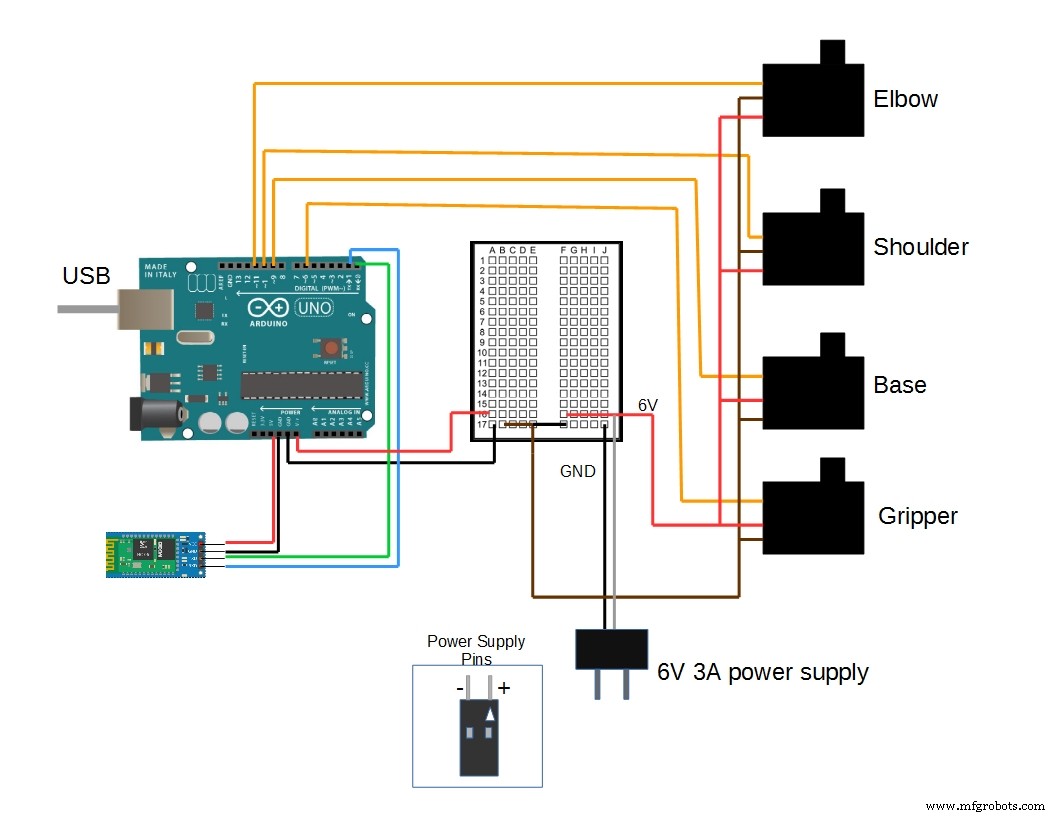
Schaltpläne