


Automatisches Katapult zum Werfen von Tierfutter, Bällen und mehr!
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Apps und Onlinedienste
 |
|
Über dieses Projekt
Hallo und willkommen zu meinem ersten Projekt!
Unsere Hündin LIEBT ihr Futter, sie frisst buchstäblich alles innerhalb von Sekunden. Ich habe mir Möglichkeiten ausgedacht, dies zu verlangsamen, von Bällen mit dem Essen darin bis hin zum Werfen im ganzen Garten. Erstaunlicherweise ist sie jetzt wie ein Staubsauger und kann das Futter beeindruckend schnell finden und essen. Also zurück zum Zeichenbrett und ich habe mir dieses Gerät ausgedacht, um ihr zu helfen, langsamer zu werden und ihr Essen zu genießen :)
KONZEPT

Bitte nehmen Sie sich die paar Sekunden Zeit, um die 2 Videos zu genießen, sie erklären viel.
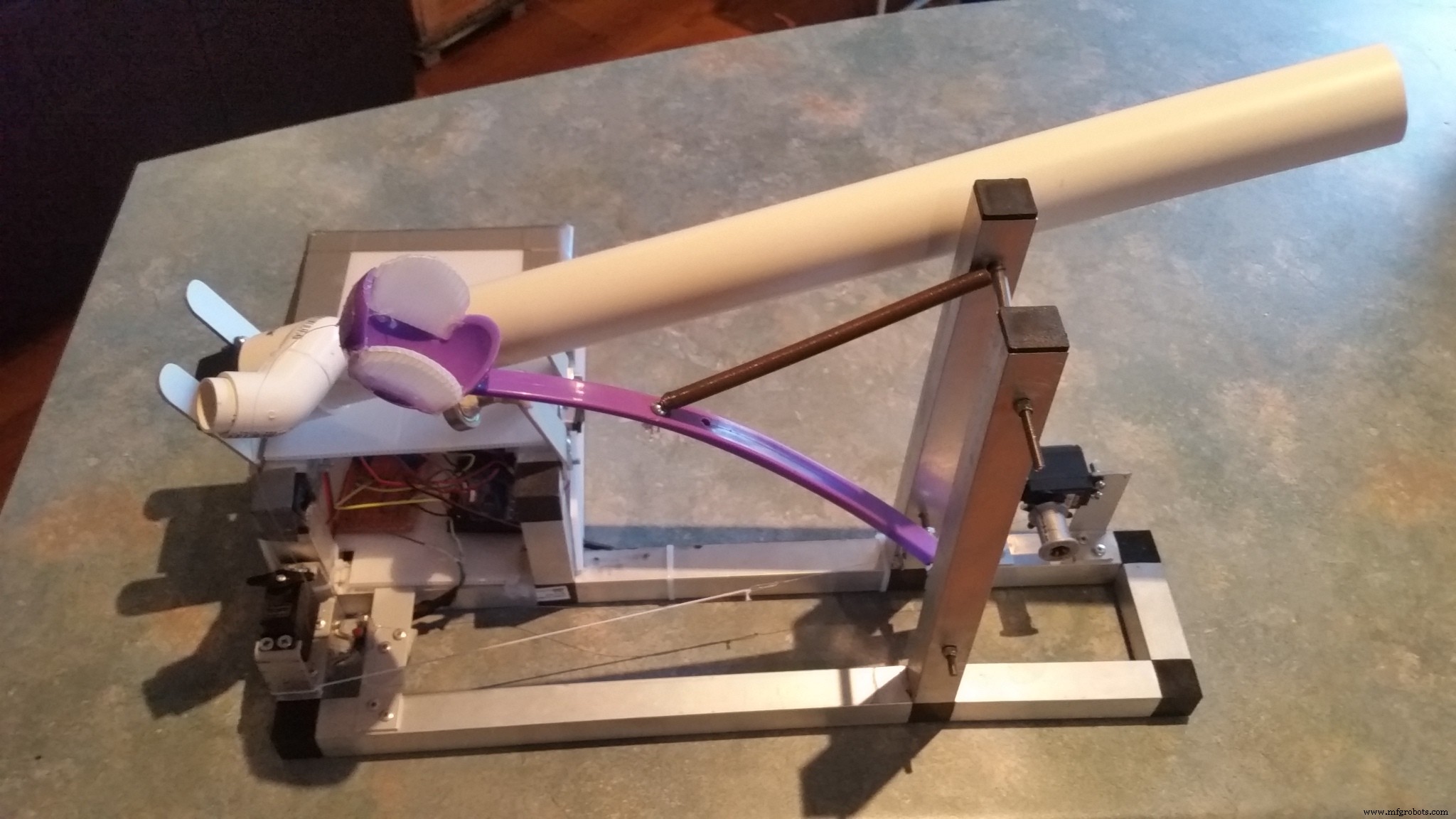
Aber in Worten, das Grundkonzept besteht darin, dass sich das Rotator-Servo dreht und den Katapultarm nach unten zieht. Er tut dies, bis er den Endschalter berührt. Dann geht das Trigger-Servo in die Halteposition, die den Katapultarm nach unten hält. Der Rotator-Servo spult dann in die ursprüngliche Position zurück, bereit für den nächsten Wurf.
Das Food Delivery-Servo dreht das Rohr und liefert etwas Essen (oder andere Dinge) an den Katapultarmbehälter / -kopf. Das Triggerservo dreht sich dann und lässt die Feder den Katapultarm zurückziehen und das Futter schleudern.
In Tests katapultierte dieser Aufbau und katapultierte Hundefutterkekse über 10 Meter, wobei das Essen rollte. Anpassungen an Servos und das Wechseln der Feder ändern dies vollständig.
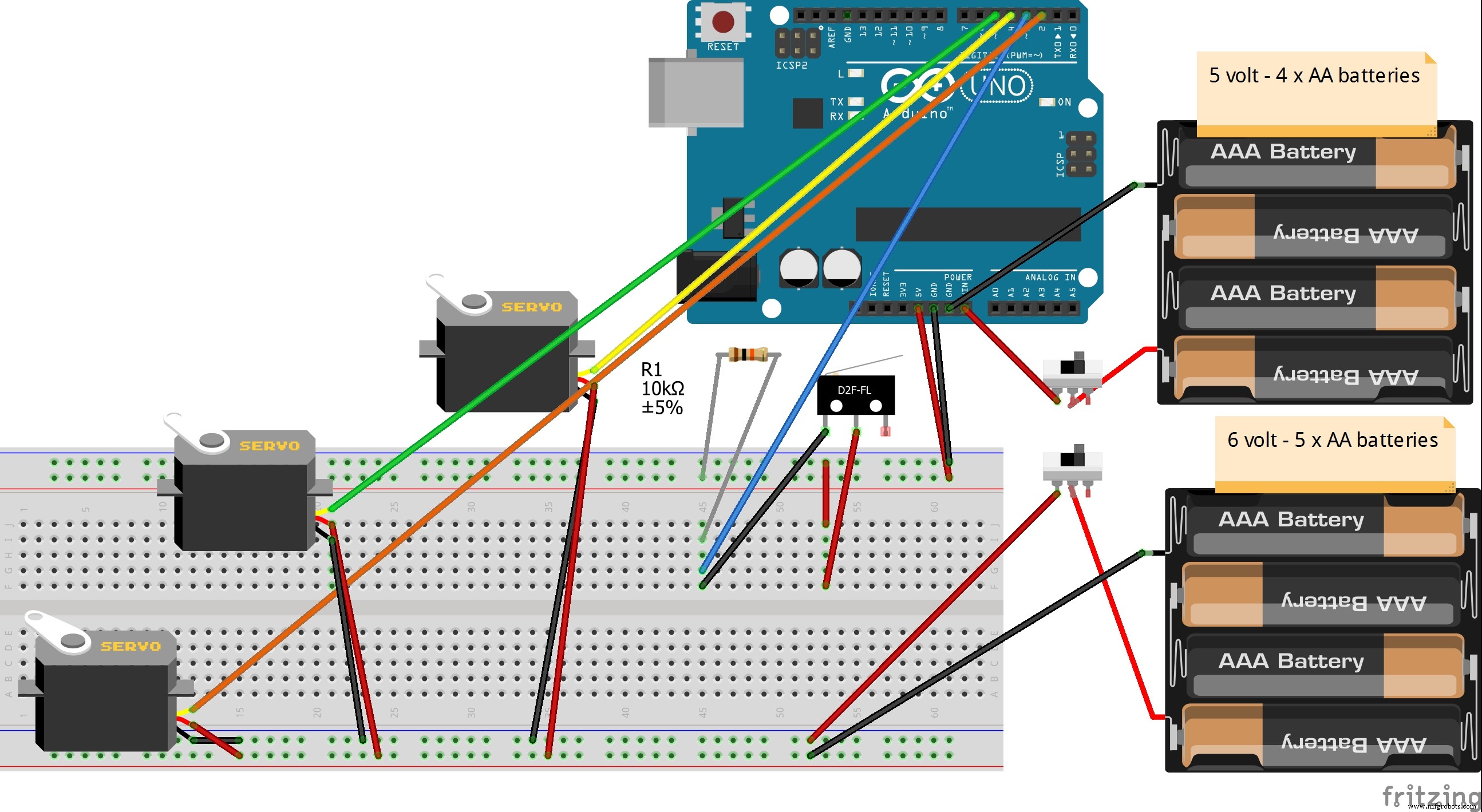
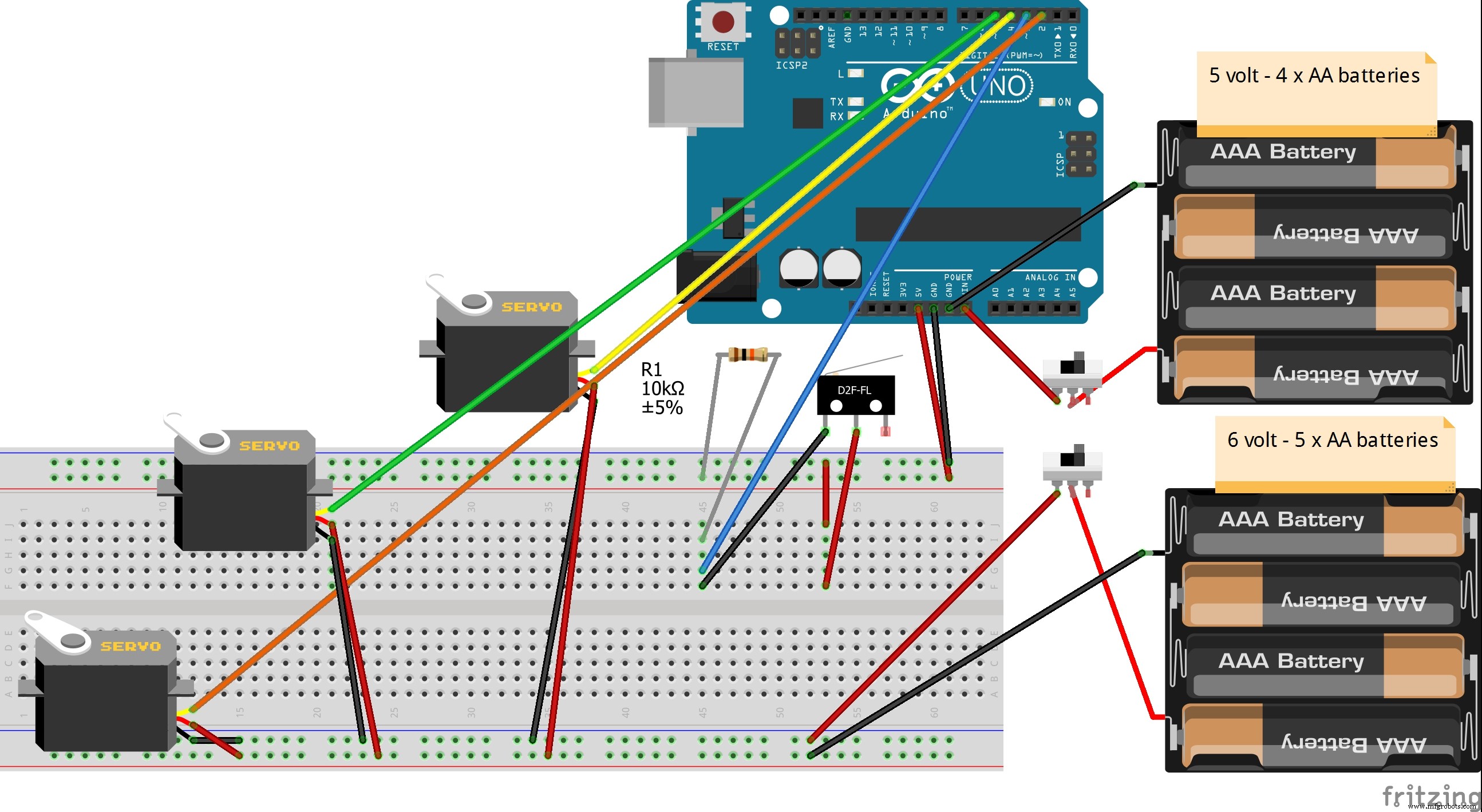
ELEKTRONIK
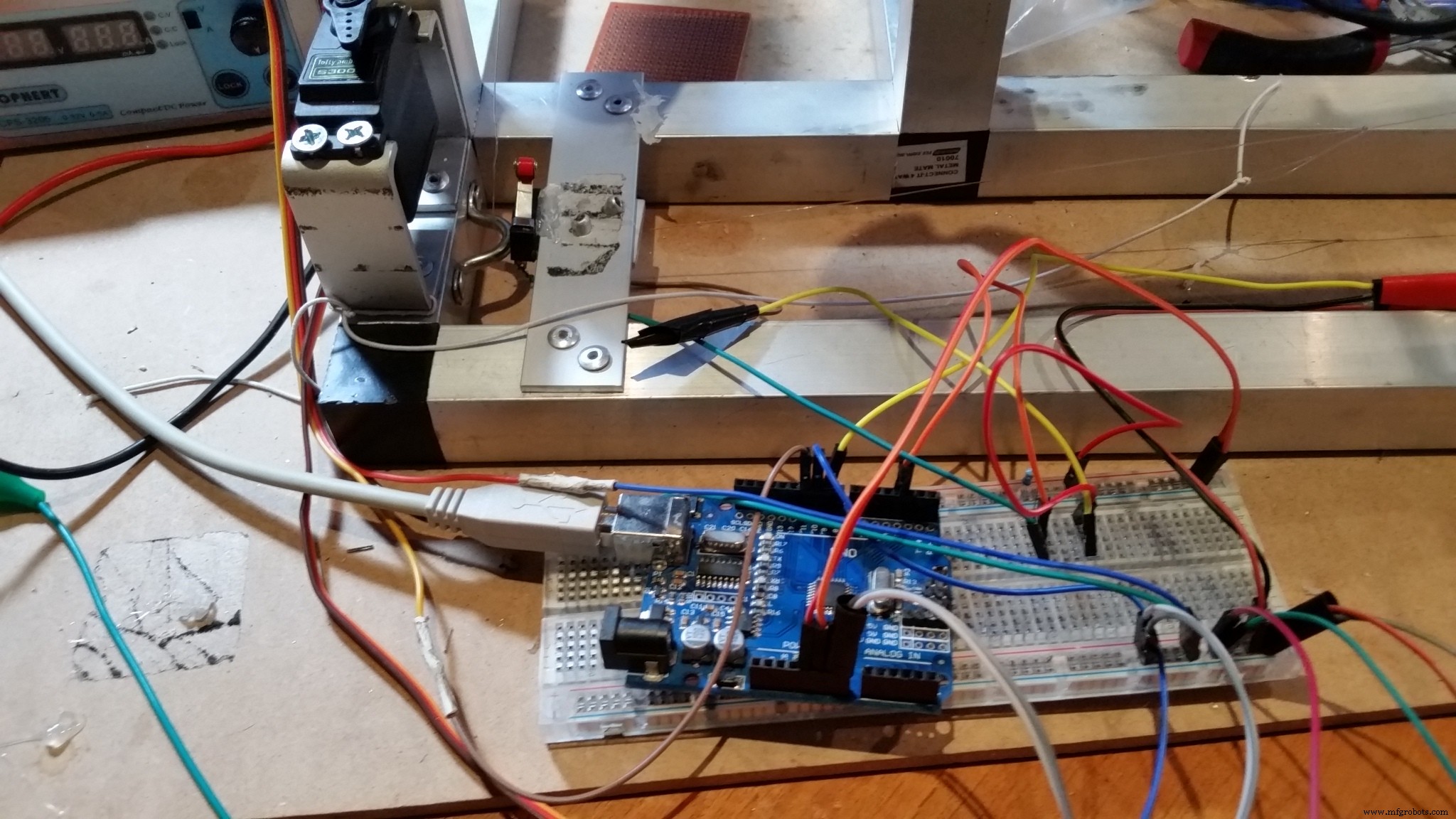
Ich werde versuchen, während dieses Projekts prägnant zu sein, nicht nur der Einfachheit halber, sondern weil dieses Katapult auf 100 verschiedene Arten hergestellt werden kann. Es kann skaliert werden und Sie können verschiedene Strukturen herstellen und verschiedene Materialien verwenden. Abgesehen von der Elektronik und den Servos ist der Rest völlig flexibel mit dem, was Sie zur Hand haben, oder Ihrem Budget.
Ich werde nicht Schritt für Schritt erklären, wie man die Elektronik macht, es gibt viele beeindruckende Projekte dazu. Vor allem weil ich ein Neuling bin, habe ich wahrscheinlich Fehler gemacht und du solltest besser von Profis lernen;)
MATERIALIEN
- Arduino Uno R3 - jeder Arduino wird den Job machen
- 2 x 180-Grad-Servos
- 1 x Servo mit kontinuierlicher Rotation
- Endschalter
- 10k Ohm Widerstand
- 4 x AA-Batterien und Etui
- 1 x 6-Volt-Laternenbatterie - kann (und werde ich) durch 5 x AA-Batterien ersetzt werden, die zusammen verdrahtet sind
- 2 x Schalter - jede Art reicht aus, auch die einfachste
- Verbindungskabel - davon reichlich;)
- Breadboard - zum Testen
MATERIALIEN - WENN SIE PERMANENT ERSTELLEN
Perfboard 2 x 2-Pin-Anschlüsse - optional, Sie können die Batteriegehäuse fest verdrahten.
SERVOS
Ich habe ein paar billige Lofty Ambition S3003 180-Grad-Servos bei eBay gekauft. Sie werden zumindest etwas von diesem Grunzen wollen, versuchen Sie nicht, weniger zu kaufen, da sie die Last nicht tragen können. Aber es müssen auch keine teuren von Jaycar (australischer Elektronikladen) oder ähnlichem sein. Das von mir verwendete kontinuierliche Rotationsservo ist FS5106R. Das Modell ist nicht wichtig, aber Sie benötigen das Servo auf jeden Fall, um mindestens diese Spezifikationen zu haben.
Wenn Sie das Katapult stärker oder größer machen, stellen Sie sicher, dass Sie größere Servos bekommen.
STRUKTUR

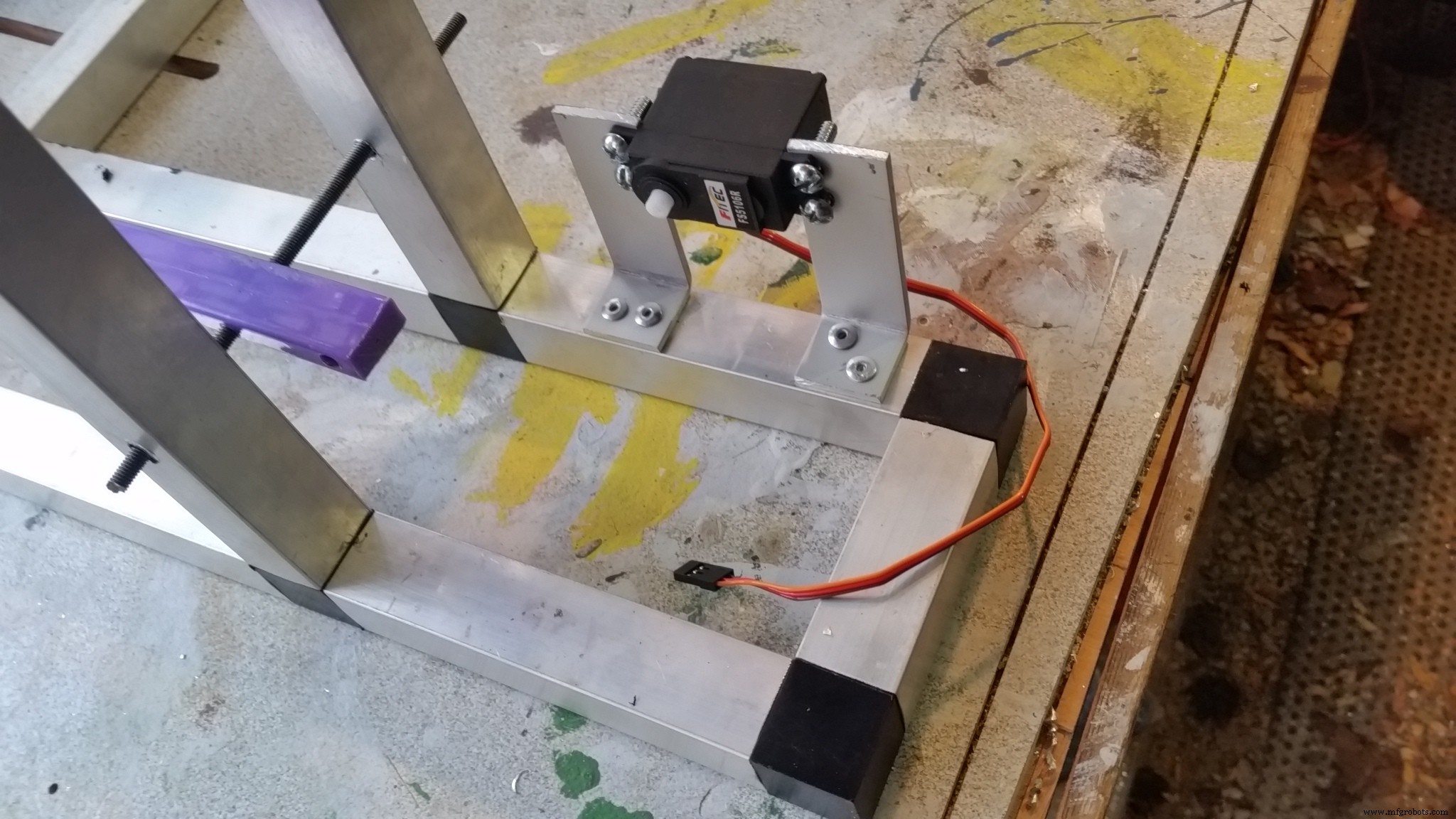


Wie bereits erwähnt, liegt die Struktur ganz bei Ihnen. Sie können es aus Kunststoff, Holz oder Metall herstellen. Auch die Größe ist Ihnen überlassen. Wenn Sie mehr Nahrung (oder andere Dinge) katapultieren möchten, machen Sie sie kleiner oder größer. Aufgrund dieser Punkte werde ich daher nicht ins Detail gehen, wie ich meine Struktur erstellt habe. Ich freue mich sehr, Antworten auf alles zu geben.
Ich bin ein GROSSER Fan von Wiederverwendung/Recycle/Upcycle/etc. So viel von dem, was ich gebraucht habe, hatte ich in meinem Schuppen. Ich habe den größten Teil meiner Struktur aus Aluminium gemacht, das ich aufgrund eines anderen Projekts hatte. Die Hauptstruktur besteht aus 25 mm Vierkant-Aluminiumrohr und "connect-it"-Kunststoffverbindern. Die Halterungen für die Motoren habe ich aus 25mm x 3mm Aluminium gefertigt.
Das Konzept der Essenslieferung stammt aus diesem Projekt:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 von https://www.hackster.io/circuito-io-team – ein großes Dankeschön an sie!
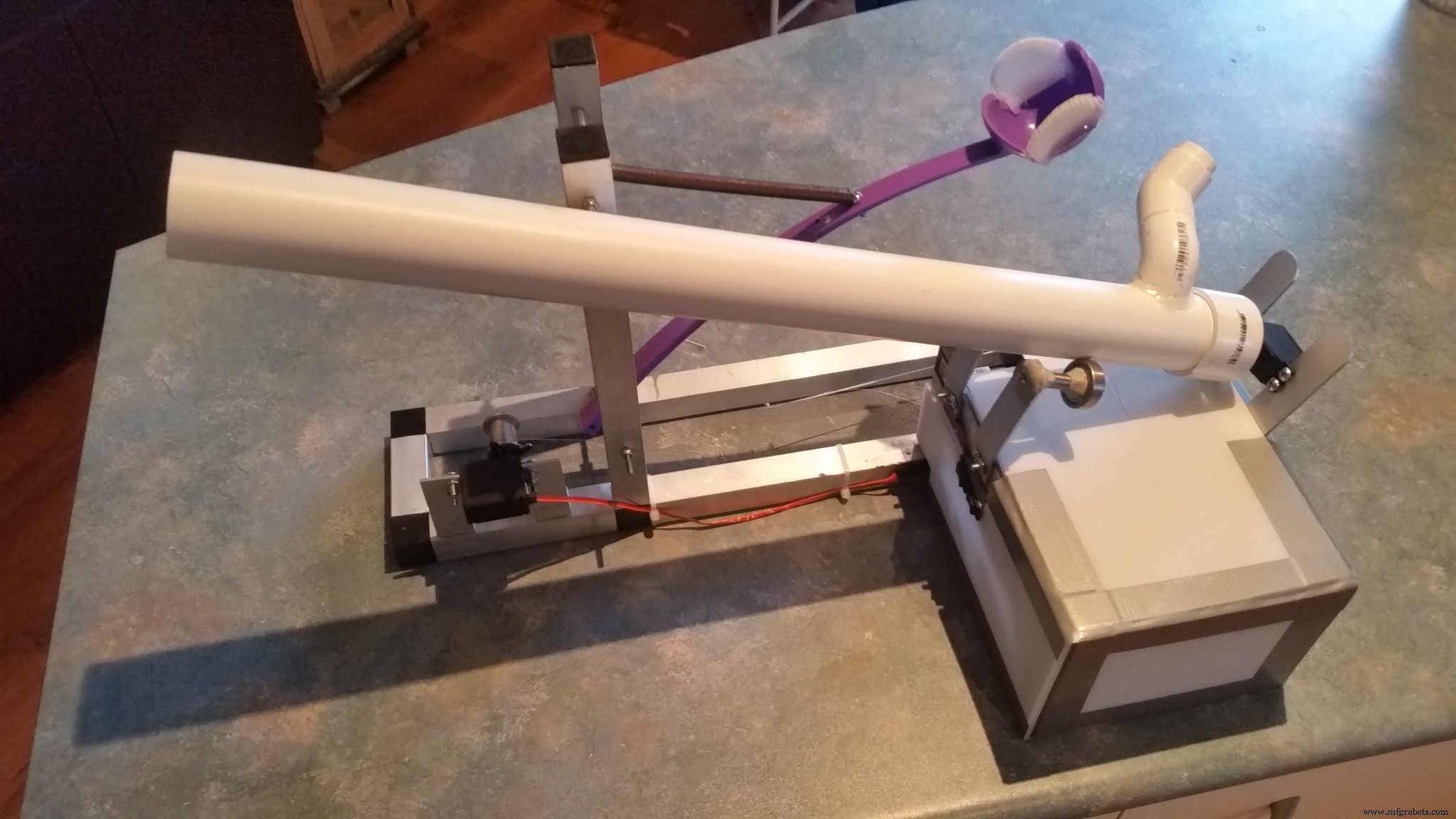
Der Halter, den ich gemacht habe, ist aus 40 mm PVC-Rohr von meinem örtlichen Baumarkt. Der eigentliche Arm besteht aus zwei kleineren 45-Grad-Anschlüssen, die miteinander verbunden und in das größere Rohr heißgeklebt sind. Das größere PVC-Rohr hat einen weiteren 45-Grad-Anschluss, um das Einfüllen der Tierfutterkekse (oder anderer Dinge) zu erleichtern. Alle sind so gemacht, dass sie für alle Modifikationen auseinandergezogen werden können.
Der Rest für den Speisenausgabearm wurde so konzipiert, dass er eine leichte Kreisbewegung ermöglicht - um das Servo zu schonen. Es gibt bessere Möglichkeiten (wenn Sie die Werkzeuge haben), um dies zu tun, aber ich habe mein Bestes gegeben. Ich habe einige Halterungen hergestellt, eine Metallstange zerschnitten und ein Produkt namens "knet it" verwendet, um die Stangen an den Halterungen und den Lagern zu befestigen. Wie Sie in den Videos sehen können, dreht sich das PVC-Rohr reibungslos über die Lager und diese nehmen einen Großteil des Gewichts (und des erforderlichen Drehmoments) vom Servo.
Der Katapultarm ist ein Tennisballwerfer aus einem Billigladen für 2 $.
Die katapultierende Kraft stammt von einer alten Feder, die ich in meiner Werkstatt gefunden habe - wie man am Rost sehen kann. Die Größe und Art und Stärke der Feder ist entscheidend dafür, wie stark und effektiv das Katapult funktioniert. Sie müssen die Servostärke, Federstärke und Flexibilität des Katapultarms ausgleichen. Dieses Gleichgewicht zu finden ist schwierig und hängt wirklich davon ab, was Sie suchen. Ich habe mich für ein Design entschieden, das Bewegung im Arm hinterlässt, was zu einer gewissen Unvorhersehbarkeit des Ziels des Essens führt. Das obere Gehäuse des Katapultarms, das die Kekse aufnimmt, hilft auch bei der Unvorhersehbarkeit. Mehr Spaß für das Haustier, das Futter zu finden.
Der Katapultarm wird mit einer Angelschnur durch einen kleinen Metallgriff (oder einen Feeder, je nach Verwendung) nach unten gezogen, nach unten unter eine Plattform, die den Endschalter hält (mehr dazu im zweiten), entlang der Länge der Struktur durch eine andere Metallgriff (um ein Verheddern zu verhindern), dann an der Spindel befestigt (ich habe das Plastikding verwendet, das Baumwolle für die Spindel am Rotator hält), die am Endlosservo befestigt ist. Zusätzlich habe ich ein dünnes und schwaches Gummiband verwendet, das an der Angelschnur und den Trigger-Halterungen befestigt ist. Dadurch wird sichergestellt, dass sich die Angelschnur beim Abwickeln des Rotators nirgendwo verfängt.
Ich habe diesen Tunnelkern - Allzweck-Kunststoffplatte - Doppelwandige Versorgungsplatine verwendet, um auf einfache Weise das Gehäuse für die Batterien und die Elektronik zu erstellen.
Die Struktur ist sehr solide und dennoch recht leicht. Der schwerste Teil davon ist die Laternenbatterie, die in Kürze durch AA-Akkus ersetzt wird.
GELERNT UND ZUKÜNFTIGE ÄNDERUNGEN
Wie bei allem, was Sie nicht beherrschen, gibt es immer Dinge, die Sie dabei lernen. In diesem Projekt, nun, sagen wir einfach, Sie würden sich mit meiner Liste langweilen, bevor Sie zum Ende kommen;)
Eines der größten Probleme ist das Verstopfen von Lebensmitteln. Dieser Lebensmittellieferarm stammt aus einem Projekt, aber leider kann ich ihn nicht finden. Es liefert sporadisch keine Kekse, aber das ist gut so, es lässt das Tier raten! Aber im Allgemeinen funktioniert es sehr gut.
Ich habe die Struktur aus Aluminium gebaut, weil unser Hund nicht sanft ist, also muss er ihr standhalten. Zum Glück läuft es bisher gut.
Ich werde den Katapultarm verbessern, damit er ein bisschen sexier aussieht. Die meisten wichtigen Elemente können zerlegt werden, um den Zugriff zu ermöglichen. z.B. Essenslieferung, Elektronikgehäuse.
Alles in allem ein sehr lustiges Projekt und unser Hund liebt es! Ich gebe sehr gerne Antworten oder Ratschläge zu allem.
Vielen Dank an Hackster und an Sie, dass Sie über das automatische Katapult gelesen haben.
Code
- Automatisches Katapult - Arduino-Code
Automatisches Katapult - Arduino-CodeArduino
/* * Automatischer Tierfutterschleuder von Nathan King Juni 2018 */#includeint FoodDeliveryReleasePosition =115;int FoodDeliveryHoldPosition =0;int TriggerReleasePosition =90;int TriggerHoldPosition =0;int limit_switch =3;int switch_state =0;Servonahrungsmittellieferung; // Servo-Objekt erstellen, um den ArmServo-Trigger für die Lebensmittellieferung zu steuern; // Servo-Objekt erstellen, um den triggerServo-Dreher zu steuern; // Servo-Objekt erstellen, um das Rotatorvoid-Setup zu steuern () { rotator.attach (2); // befestigt den Rotator-Servo-Trigger.attach (4); // befestigt das Trigger-Servo fooddelivery.attach (5); // fügt den Servo-PinMode (limit_switch, INPUT) für die Essenslieferung hinzu; Serial.begin (9600);}void loop () { roter.write (89); // stoppt die Bewegung des Rotator-Servos - unnötig, wenn Sie ein gutes Servo haben;) delay (500); // Startpositionen fooddelivery.write (FoodDeliveryHoldPosition); Verzögerung (1000); trigger.write (TriggerHoldPosition); Verzögerung (1000); trigger.write (TriggerReleasePosition); Verzögerung (1000); // Endschalterschleife zum Stoppen des Rotator-Servos switch_state =digitalRead (limit_switch); Serial.println (switch_state); while (switch_state ==HIGH) { switch_state =digitalRead (limit_switch); Serial.println ("Schalter ist aus"); rotator.write(75); // startet den Rotator im Uhrzeigersinn mit xx Geschwindigkeit (0-255)} Serial.println ("Schalter ist an"); rotator.write(89); // stoppt Rotator-Servo // Hält den Katapultarm am Trigger und setzt den Rotator in die Ausgangsposition zurück trigger.write (TriggerHoldPosition); Verzögerung (1000); rotator.write(110); Verzögerung (4500); rotator.write(89); Verzögerung (2000); // Essenslieferung zum Katapultieren fooddelivery.write(FoodDeliveryReleasePosition); Verzögerung (500); fooddelivery.write (FoodDeliveryReleasePosition); // warten, bis das Essen fällt Verzögerung (1000); fooddelivery.write (FoodDeliveryHoldPosition); delay(150); // Dies dient dazu, eine Verzögerung zwischen der Essensausgabe und dem Auslösen des Auslösers hinzuzufügen roter.write(89); Verzögerung (1000); // Katapult loslassen!! trigger.write (TriggerReleasePosition); Verzögerung (3000); // Verzögerung für das Haustier, um das Futter zu finden - bearbeiten Sie dies, um zu ändern, wie schnell das Futter geliefert wird :)}
Schaltpläne
Herstellungsprozess
- Hygienisches Design für die Lebensmittel- und Verarbeitungsindustrie
- Tipps zur Auswahl von Controllern und Rekordern für Lebensmittel- und Getränkeanwendungen
- Acetal-Farb-Masterbatches für Automobile und mehr auf Basis emissionsarmer Träger
- B&R präsentiert „High-End“-Computer für autonome Land- und Baufahrzeuge
- Tipps für die CNC-Bearbeitung von Titan:Luft- und Raumfahrt und mehr
- Automatischer Langdreher für Längs- und Produktionsdrehen
- Tipps zum Auftragen von Metallschmiermitteln:Vermeidung von Überfettung und mehr
- Invar:Smart-Warehousing-Trends für 2021 und darüber hinaus
- Lebensmittelautomaten – Produktvielfalt
- Wissen, wann und wie Sie eine automatische Druckerhöhungspumpe für Ihr Zuhause auswählen