


Arduino/Android - BLUETOOTH-Multi-Servo-Motorsteuerung
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Über dieses Projekt

Hallo Welt! Ich habe gestern eine 1 Servo Control App erstellt und sagte, dass ich eine Multi Control machen würde, also hier ist die Multi Control App! Ich habe auch einen besseren Arduino-Code gemacht. Folgen Sie dem nächsten Schritt für Schaltplan, Code, Stückliste und App.
Laden Sie die App herunter auf: GOOGLE PLAY
Kontaktieren Sie mich, wenn Sie den Quellcode haben möchten!
Schritt 1:Stückliste
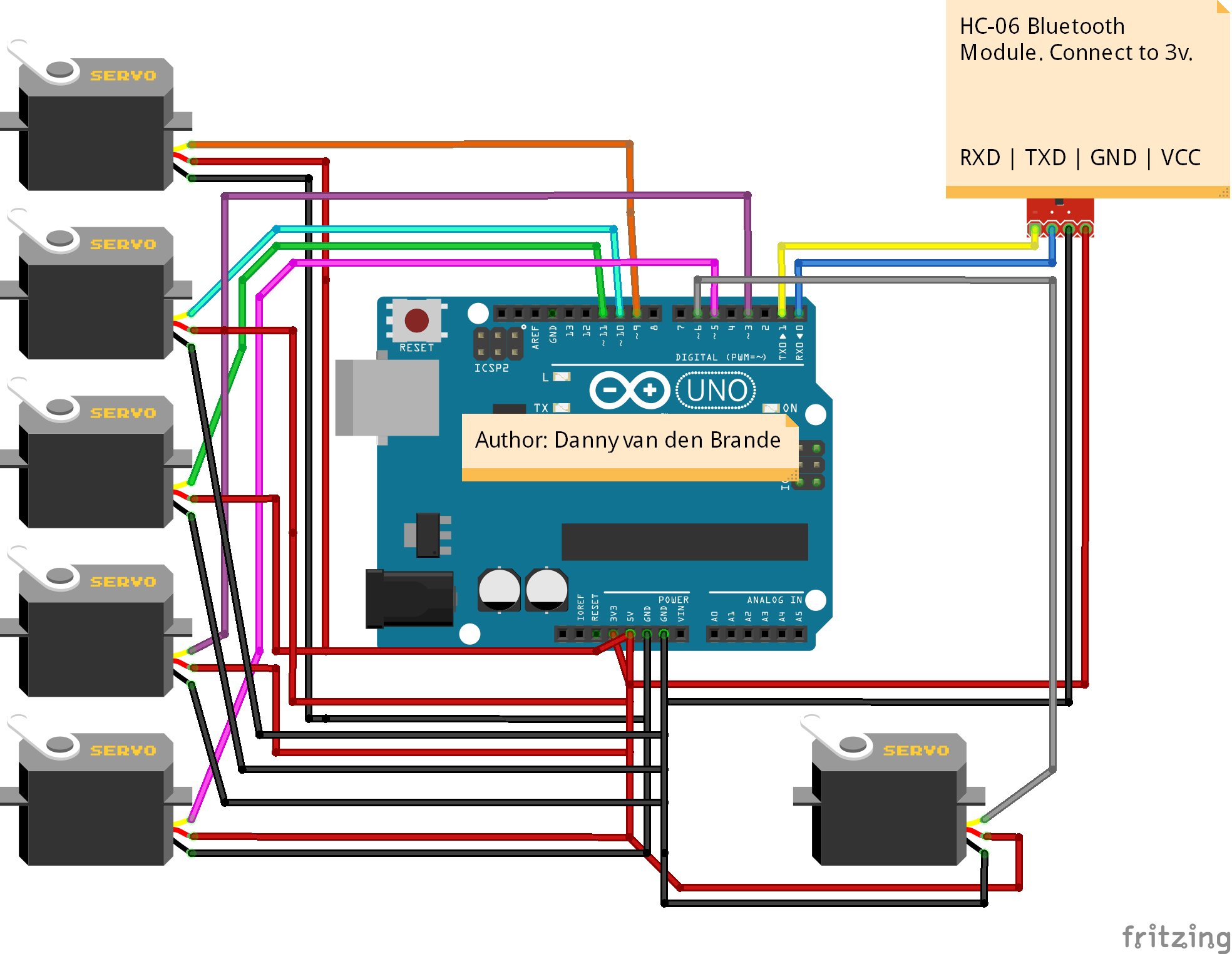
Verbinde alles wie im Schaltplan, lade den Code hoch, lade die App herunter, verbinde Bluetooth nach dem Koppeln der Geräte und es sollte funktionieren. Stellen Sie sicher, dass Sie RXD mit TX und TXD mit RX verbinden.
Stellen Sie außerdem sicher, dass Sie das Bluetooth-Modul beim Hochladen NICHT verbinden.
Teileliste:
- Arduino Uno, (Benutze einen Mega, wenn du mehr als 6 Servos verwenden möchtest!) Ich habe den . verwendet RobotDyn Uno.
- HC-06 Bluetooth-Modul oder ein anderes.
- 6 x Servomotor. (Kann natürlich mit einem testen )
- Überbrückungskabelsatz MM/FF/MF
- Android-Telefon.
Viel Glück!
Folgen Sie dem nächsten Schritt, um herauszufinden, wie Sie den Namen, Pin und die Baudrate Ihres Bluetooth-Moduls ändern können. (optional )
Schritt 2:So ändern Sie den Namen Ihres HC-06
Was wird benötigt?
- 1 x USB-auf-TTL-Mikrocontroller-Programmierer zum Anschluss an Ihren HC-06
Wie verbinde ich den Programmierer?
- VCC zu VCC
- GND zu GND
- RXD zu TX
- TXD zu RX
Lasst uns beginnen:
- Verbinden Sie das USB-TTL-Programmiergerät mit dem HC-06.
- Schließen Sie den USB an und öffnen Sie die Arduino IDE.
- Öffne den seriellen Monitor.
- Geben Sie "AT" ohne Anführungszeichen ein. Sie sollten im seriellen Monitor eine Antwort sehen, die "OK" sagt.
- Geben Sie "AT+NAMExyz" ein. Setzt den Modulnamen auf „xyz“ (Ersetzen Sie xyz durch den gewünschten Namen.) Antwort sollte OKsetname sein.
- Geben Sie "AT+PIN1234" ein. Setzt den Pin auf 1234 (ersetzen Sie 1234 durch Ihren gewünschten Pin). Die Antwort sollte OKsetPIN sein. Für weitere Informationen zum Ändern der Baudrate usw. habe ich eine PDF-Datei beigefügt. Viel Glück!
Code
- BLUETOOTH_Servo_Control_Multi_Servo.ino
BLUETOOTH_Servo_Control_Multi_Servo.inoArduino
Code zur Steuerung mehrerer Servos./*Autor:Danny van den Brande.Mit diesem Code können Sie mehrere Servomotoren mit einer Android-App steuern.Sie können so viele hinzufügen, wie Sie möchten, bis Ihre Pins aufgebraucht sind. Sie können dem Code weitere Servos hinzufügen. Wenn Sie die Quelle der App möchten, kontaktieren Sie mich einfach. */#includeServo myservo1, myservo2, myservo3, myservo4, myservo5, myservo6, myservo7, myservo8, myservo9, myservo10;byte serialA;void setup(){ myservo1.attach(9); myservo2.attach(10); myservo3.attach(11); myservo4.attach(3); myservo5.attach(5); myservo6.attach(6); // myservo7.attach(); Füllen Sie die Pin-Nummern aus, wenn Sie mehr als 6 Servos verwenden. Ich habe sie leer gelassen // myservo8.attach (); // myservo9.attach (); // myservo10.attach (); Serial.begin (9600); // Ändern Sie Ihre Baudrate bei Bedarf in die Baudrate Ihrer Bluetooth-Module.}void loop () { if (Serial.available ()> 2) {serialA =Serial.read (); Serial.println (serialA .) );} { unsigned int servopos =Serial.read (); unsigned int servopos1 =Serial.read (); unsigned int realservo =(servopos1 *256) + servopos; Serial.println (Realservo); if (realservo>=1000 &&realservo <1180) {int servo1 =realservo; servo1 =map(servo1, 1000,1180,0,180); myservo1.write (servo1); Serial.println ("Servo 1 EIN"); Verzögerung(10); } if (realservo>=2000 &&realservo <2180) {int servo2 =realservo; servo2 =map(servo2,2000,2180,0,180); myservo2.write (servo2); Serial.println ("Servo 2 Ein"); Verzögerung(10); } if (realservo>=3000 &&realservo <3180){int servo3 =realservo; servo3 =map(servo3, 3000, 3180,0,180); myservo3.write(servo3); Serial.println ("Servo 3 Ein"); Verzögerung(10); aufrechtzuerhalten. Wenn (realservo>=4000 &&realservo <4180){int servo4 =realservo; servo4 =map(servo4, 4000, 4180,0,180); myservo4.write(servo4); Serial.println ("Servo 4 Ein"); Verzögerung(10); } if (realservo>=5000 &&realservo <5180){int servo5 =realservo; servo5 =map(servo5, 5000, 5180,0,180); myservo5.write (servo5); Serial.println ("Servo 5 Ein"); Verzögerung(10); aufrechtzuerhalten. Wenn (realservo>=6000 &&realservo <6180){int servo6 =realservo; servo6 =map(servo6, 6000, 6180,0,180); myservo6.write(servo6); Serial.println ("Servo 6 Ein"); Verzögerung(10); } // if (realservo>=7000 &&realservo <7180) {// UNCOMMENT wenn mehr als 6 Servos verwendet werden. // int servo7 =realservo; // servo7 =map (servo7, 7000, 7180,0,180); // myservo7 .write (servo7); // Serial.println ("servo 7 On"); // delay (10); // } //// if (realservo>=8000 &&realservo <8180){// int servo8 =realservo; // servo8 =map (servo8, 8000, 8180,0,180); // myservo8.write (servo8); // Serial.println ("servo 8 On"); // delay (10); // }/ /// if (realservo>=9000 &&realservo <9180){// int servo8 =realservo; // servo8 =map(servo9, 9000, 9180,0,180); // myservo8.write (servo8); // Serial. println("servo 9 On");// delay(10);// }//// if (realservo>=10000 &&realservo <10180){// int servo10 =realservo;// servo10 =map(servo10, 10000, 10180,0,180); // myservo10.write (servo10); // Serial.println ("servo 10 On"); // delay (10); // } }}
Schaltpläne
Herstellungsprozess
- Einfacher Pi-Roboter
- Universelle Fernbedienung mit Arduino, 1Sheeld und Android
- Arduino-Kontrollzentrum
- Android-gesteuertes Spielzeug mit Raspberry Motor Shield
- Hindernisse vermeiden Roboter mit Servomotor
- Arduino mit Bluetooth zur Steuerung einer LED!
- Arduino-Befeuchtersteuerung
- Steuerung des Servomotors mit Arduino und MPU6050
- Was ist ein Servomotor?
- Was ist ein Servomotor-Reduzierer?