


Arduino-Tutorial 04:Motoren
Willkommen zum vierten Arduino-Tutorial aus unserer Arduino-Tutorial-Reihe. In diesem Tutorial lernen wir, wie man Gleichstrom- und Servomotoren mit PWM (Pulsweitenmodulation) steuert.
Dies ist ein Schritt-für-Schritt-Video-Tutorial, das leicht zu befolgen ist. Außerdem finden Sie unter dem Video, welche Teile wir für dieses Tutorial und die Quellcodes der Beispiele im Video benötigen.
Für das erste Beispiel benötigte Komponenten
Offenlegung:Dies sind Affiliate-Links. Als Amazon-Partner verdiene ich an qualifizierten Käufen.
Schaltplan des ersten Beispiels zur Steuerung eines Gleichstrommotors
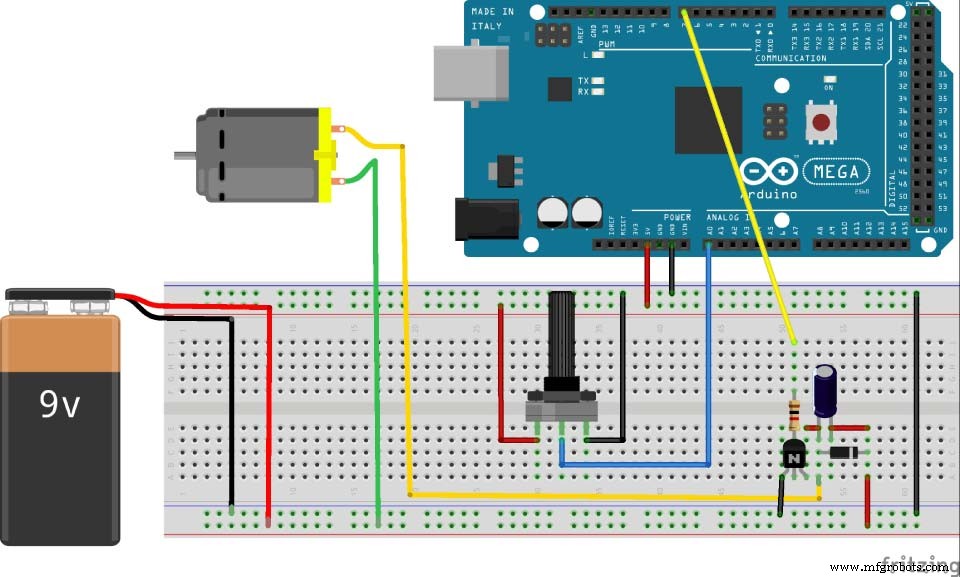
Quellcode des ersten Beispiels zur Steuerung eines DC-Motors
int pwmPin = 7;
void setup() {
Serial.begin(9600);
pinMode( pwmPin, OUTPUT);
}
void loop () {
int potValue = analogRead(A0);
int newpotValue = map(potValue, 0, 1023, 0 , 255);
analogWrite(pwmPin, newpotValue);
}Code language: Arduino (arduino)
Erforderliche Teile für das zweite Beispiel, die Steuerung eines Servomotors
Schaltplan des zweiten Beispiels zur Steuerung eines Servomotors
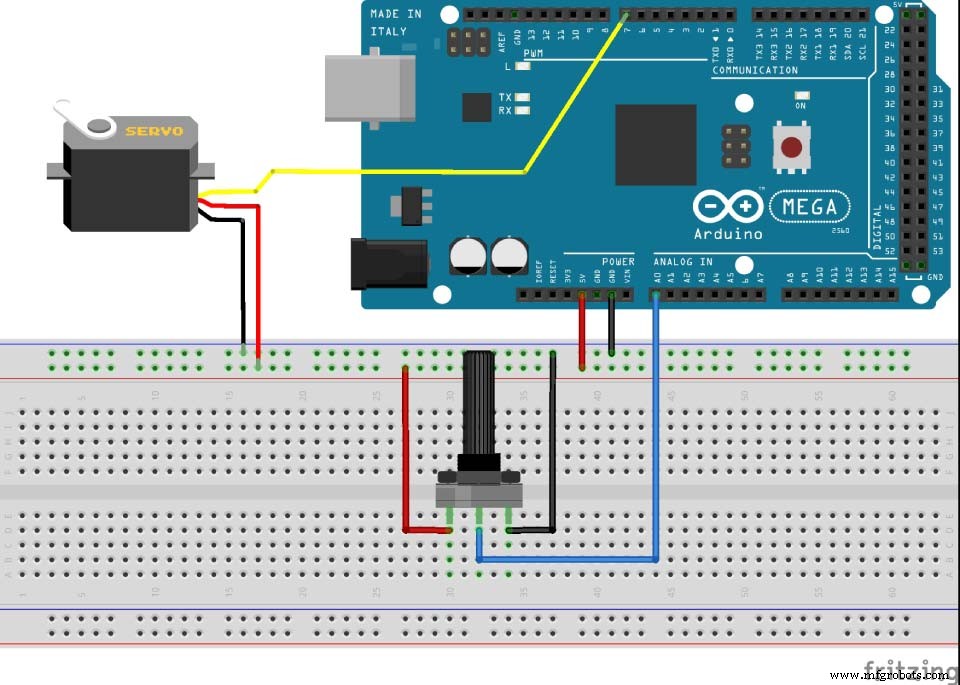
Quellcode des zweiten Beispiels zur Steuerung eines Servomotors
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(7);
}
void loop() {
int potValue = analogRead(A0);
int angleValue = map(potValue, 0, 1023, 0, 180);
myServo.write(angleValue);
delay(10);
}Code language: Arduino (arduino)
Herstellungsprozess