


360-Radar (das Daten in ein Bild codiert)
Komponenten und Verbrauchsmaterialien
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Notwendige Werkzeuge und Maschinen
| ||||
 |
|
Apps und Onlinedienste
 |
| |||
| |
|
Über dieses Projekt
Ich bin hier und ich werde dir zeigen, wie man ein 360 Radar macht. Senden Sie die Daten an den Computer und zeichnen Sie nach der Verarbeitung das Radar in Echtzeit und nach einer Umdrehung (360 Umdrehungen) speichern Sie das vorherige Radar und zeichnen das neue. und nach all dem ENCODE die Daten und verstecke sie in einem Bild. Zum Beispiel Wenn Sie nur die verschlüsselten Daten senden und jemand diese Datenübertragung beobachtet hat, wird er feststellen, dass Sie VERSCHLÜSSELTE Daten übertragen haben . Aber Wenn Sie die verschlüsselten Daten in einem Bild verstecken, wird er nie herausfinden, was Sie getan haben, und nur denken, dass Sie ein Foto für jemand anderen gesendet haben.
Schritt 1 (Sammeln Sie, was Sie brauchen)
In diesem Projekt benötigen Sie:
- Arduino (ich habe Uno R3 verwendet)
- Servomotor (wir brauchen 2 davon, da wir 360° Bewegungsfreiheit haben sollten)
- Ultraschallsensor (wir verwenden diesen, um die Entfernung zu berechnen)
- Drähte zum Anbringen des Ultraschallsensors und des Servos.
Schritt 2 (Zusammenbauen)
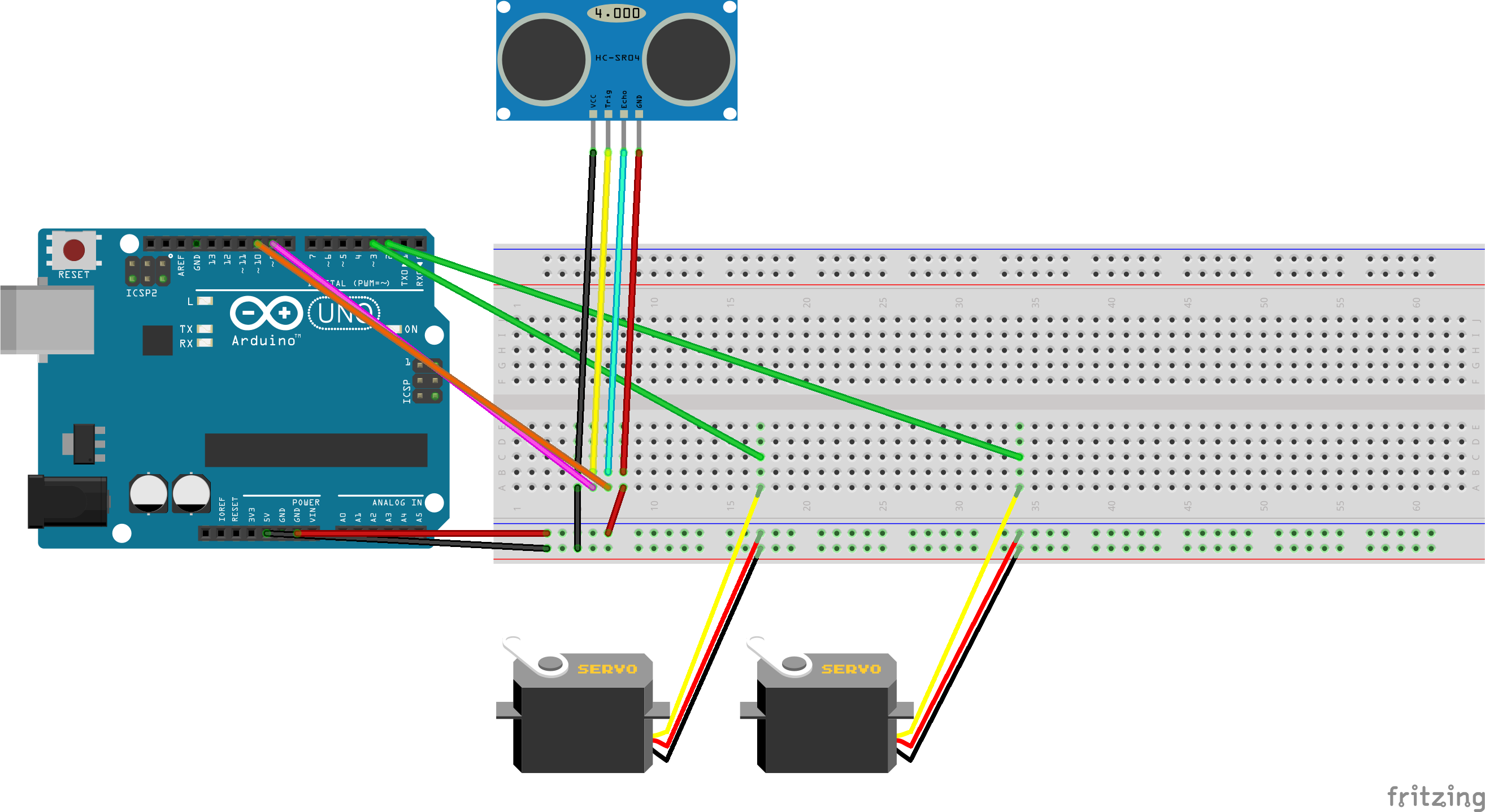
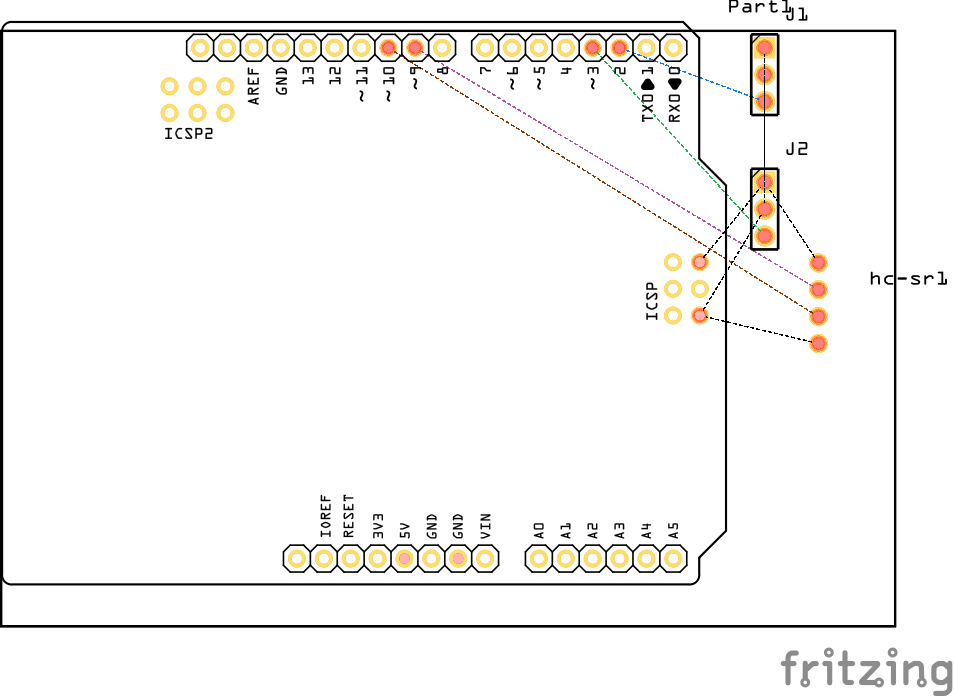
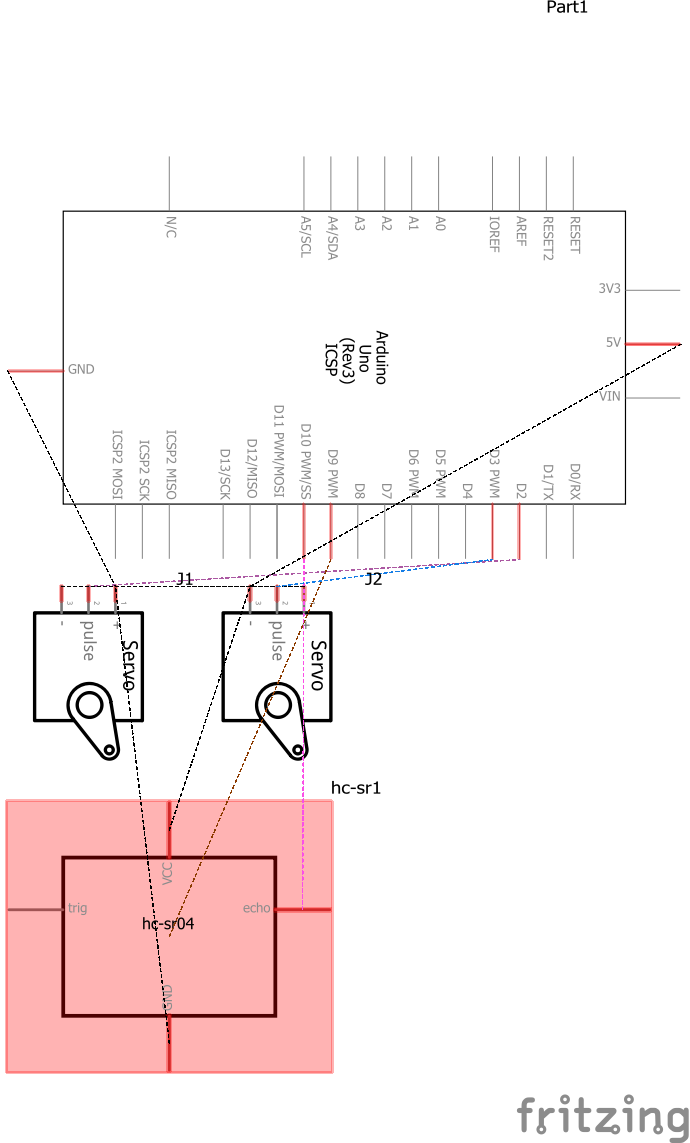
Verbinden Sie den Servo- und Ultraschallsensor wie im folgenden Schema (direkt über dem C++-Code) mit dem Arduino. Sie können den Code hochladen und auf dem Computer anzeigen.
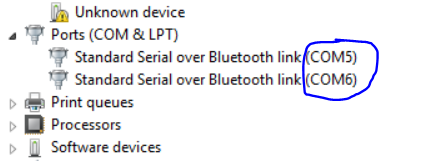
Achtung:Wenn Sie den Namen des Ports nicht kennen, gehen Sie zum Geräte-Manager und suchen Sie nach Ports. Sie können dort den Namen sehen (COM3 oder COM5).
Wenn Sie das Projekt beenden, bitten Sie mich einfach, die EXE von Radar Drawer zu senden.
*Update*:Laden Sie die EXE-Datei auf dieser Seite herunter.
Wenn Sie Probleme mit der Arbeit mit EXE haben oder Ihre eigene EXE erstellen möchten, fragen Sie mich einfach und ich bin hier, um Ihnen zu helfen.
Wenn Sie ein Foto importieren, um die KI zu codieren, wählen Sie die beste Methode, um es sicherer zu machen.
Code
- Servosteuerung
ServosteuerungC/C++
Dieser Code in C++ dient zur Steuerung des Servos und sollte auf Arduino hochgeladen werden#includeServo Down;Servo Up;const int trigPin =9;const int echoPin =10;long duration;int pos =0;int pos2 =0;int Abstand;int _degrees;void setup() {pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT); Down.Attach(2); Up.attach(3);Seriell.Begin(9600); }void loop () { Down.write (0); Auf.schreiben(0); für (pos =0; pos <=180; pos +=1) { Down.write (pos); _grade =pos; dis(); Verzögerung (50); if (pos ==180) { for (pos2 =0; pos2 <=180; pos2 +=1) { Up.write (pos2); _grad =pos + pos2; dis(); Verzögerung (50); } } } for (pos =180; pos>=0; pos -=1) { Down.write(pos); Up.write (pos); Verzögerung(5); aufrechtzuerhalten *0.034/2;Serial.print(Abstand);Serial.print(",");Serial.println(_degrees); }
Kundenspezifische Teile und Gehäuse
Laden Sie die EXE-Datei hier herunter circle_draw_qP2ROsoPds.rarSchaltpläne
Herstellungsprozess